







上一篇介绍了双目立体匹配SAD算法,这一篇介绍Census算法。
Census原理:
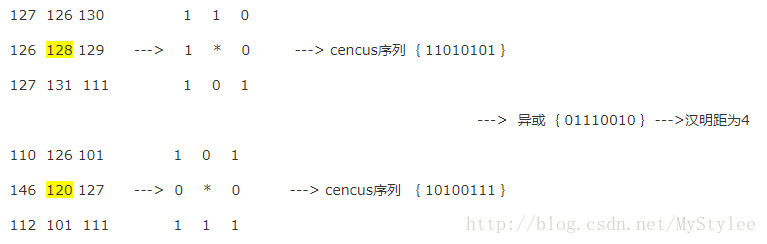
在视图中选取任一点,以该点为中心划出一个例如3 × 3 的矩形,矩形中除中心点之外的每一点都与中心点进行比较,灰度值小于中心点记为1,灰度大于中心点的则记为0,以所得长度为 8 的只有 0 和 1 的序列作为该中心点的 census 序列,即中心像素的灰度值被census 序列替换。经过census变换后的图像使用汉明距离计算相似度,所谓图像匹配就是在匹配图像中找出与参考像素点相似度最高的点,而汉明距正是匹配图像像素与参考像素相似度的度量。具体而言,对于欲求取视差的左右视图,要比较两个视图中两点的相似度,可将此两点的census值逐位进行异或运算,然后计算结果为1 的个数,记为此两点之间的汉明值,汉明值是两点间相似度的一种体现,汉明值愈小,两点相似度愈大实现算法时先异或再统计1的个数即可,汉明距越小即相似度越高。
下面的代码是自己根据原理写的,实现的结果并没有很好,以后继续优化代码。
具体代码如下:
//*************************Census*********************
#include <iostream>
#include <opencv2/opencv.hpp>
#include <opencv2/imgproc.hpp>
#include <opencv2/highgui.hpp>
using namespace std;
using namespace cv;
//-------------------定义汉明距离----------------------------
int disparity;
int GetHammingWeight(uchar value);//求1的个数
//-------------------定义Census处理图像函数---------------------
int hWind = 1;//定义窗口大小为(2*hWind+1)
Mat ProcessImg(Mat &Img);//将矩形内的像素与中心像素相比较,将结果存于中心像素中
Mat Img_census, Left_census, Right_census;
//--------------------得到Disparity图像------------------------
Mat getDisparity(Mat &left, Mat &right);
//--------------------处理Disparity图像-----------------------
Mat ProcessDisparity(Mat &disImg);
int ImgHeight, ImgWidth;
//int num = 0;//异或得到的海明距离
Mat LeftImg, RightImg;
Mat DisparityImg(ImgHeight, ImgWidth, CV_8UC1, Scalar::all(0));
Mat DisparityImg_Processed(ImgHeight, ImgWidth, CV_8UC1, Scalar::all(0));
Mat DisparityImg_Processed_2(ImgHeight, ImgWidth, CV_8UC1);
//定义读取图片的路径
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 9万+
9万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









