






 本文介绍了如何利用FX5UGXWORKS3平台编码器配合Modbus控制台实现变频器的多段速切换,支持10个位置定位,并详细讲解了定位控制模式设置和通讯接口设计,强调其灵活性、重复使用性和便捷性。
本文介绍了如何利用FX5UGXWORKS3平台编码器配合Modbus控制台实现变频器的多段速切换,支持10个位置定位,并详细讲解了定位控制模式设置和通讯接口设计,强调其灵活性、重复使用性和便捷性。
FX5U GX WORKS3平台编码器+modbus控制台达变频器 多段速
案例实现10个位置的定位,可无限扩展
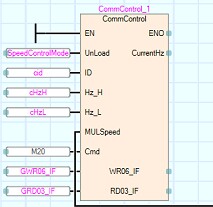
变频器可多段速切换,切换速度可使用io也可以使用modbus与变频器通讯
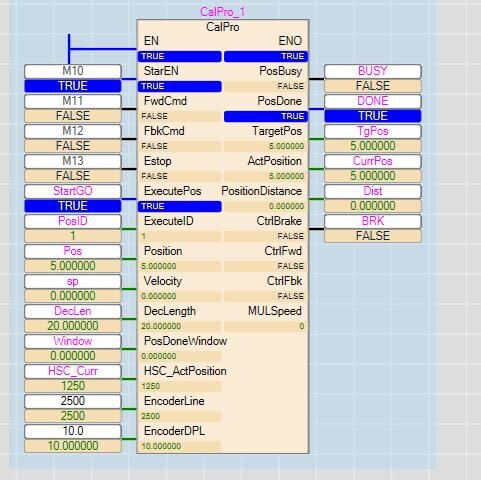
定位控制模式可设置减速长度,位置到达窗口,可满足编码器+普通电机的简易定位需求
定位算法与通讯功能隔离,方便通用,已设计成接口模式,可重复使用,只需要对接口赋值即可,方便快捷
ID:4915612540275232
叶***8
FX5U GX WORKS3平台编码器+modbus控制台达变频器 多段速
本文将介绍如何利用FX5U GX WORKS3平台编码器与modbus控制台达到变频器多段速控制的目的。我们通过一个具体的案例来展示该技术的应用,该案例实现了10个位置的定位,并且可以进行无限扩展。同时,我们还介绍了变频器多段速切换的实现方法,即通过io或者modbus与变频器进行通讯。另外,我们还介绍了定位控制模式的设置,包括减速长度和位置到达窗口的设定,以满足编码器+普通电机的简易定位需求。
首先,我们需要使用FX5U GX WORKS3平台编码器来获取电机的位置信息。编码器是一种能够实时测量旋转位置和速度的装置,通过与电机连接,我们可以获得电机的精确位置信息。在本案例中,我们使用了编码器来实现10个位置的定位。通过读取编码器的数据,并将其与目标位置进行比较,我们可以确定电机当前的位置,并进行相应的控制。
接下来是多段速切换的实现。我们通过io或者modbus与变频器进行通讯,从而实现对变频器速度的控制。通过设定不同的速度参数,我们可以实现多段速的切换。例如,我们可以通过io信号来触发不同的速度设置,从而实现速度的切换。另外,我们还可以通过modbus协议与变频器进行通讯,通过设置不同的寄存器值来实现速度的切换。
在定位控制模式方面,我们可以根据实际需求进行设置。定位控制模式主要包括减速长度和位置到达窗口的设定。减速长度指的是电机在达到目标位置之前需要减速的距离。通过设定减速长度,我们可以确保电机在接近目标位置时平稳停下,避免过冲或停止不准确的情况发生。而位置到达窗口可以用来设定目标位置的容差范围,即电机到达目标位置时所允许的偏差范围。通过设置位置到达窗口,我们可以在一定范围内判断电机是否到达了目标位置,并进行相应的控制。
需要注意的是,本文介绍的定位算法与通讯功能是相互独立的。定位算法可以根据实际需求进行设计,而通讯功能已经设计成接口模式,可以方便地重复使用。通过对接口赋值,我们可以快速实现定位控制以及与变频器的通讯功能。
综上所述,通过FX5U GX WORKS3平台编码器与modbus控制台达到变频器多段速控制的方案具有以下优势:可以实现多段速切换,满足不同场景下的速度需求;定位控制模式的设置灵活,可以根据实际需求进行调整;定位算法与通讯功能相互独立,方便重复使用;接口赋值方式使得控制过程简单快捷。
在实际应用中,该方案可以广泛应用于编码器与变频器之间的控制,满足不同行业的定位需求。例如,在自动化生产线上,可以利用该方案来实现准确定位控制,提高生产效率。此外,该方案还可以应用于机器人领域,通过对电机的定位控制,实现机器人在特定位置的精确操作。
总之,FX5U GX WORKS3平台编码器+modbus控制台达变频器的多段速控制方案在实际应用中具有广泛的应用前景。该方案通过编码器的定位控制,与变频器的多段速切换相结合,实现了精确的位置控制。通过定位控制模式的设置,可以满足不同行业的定位需求。该方案的优势在于设计灵活,易于实施,可广泛应用于自动化生产线、机器人等领域。
以上相关代码,程序地址:http://matup.cn/612540275232.html















 807
807











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









