






六旋翼PID模型,飞行器本体模型,位置控制,姿态控制,控制分配和电机控制。
购买包括:六旋翼PID和本体模型,公式说明文档。
软件:Matlab/Simulink
ID:2939699560843112
飞行控制设计


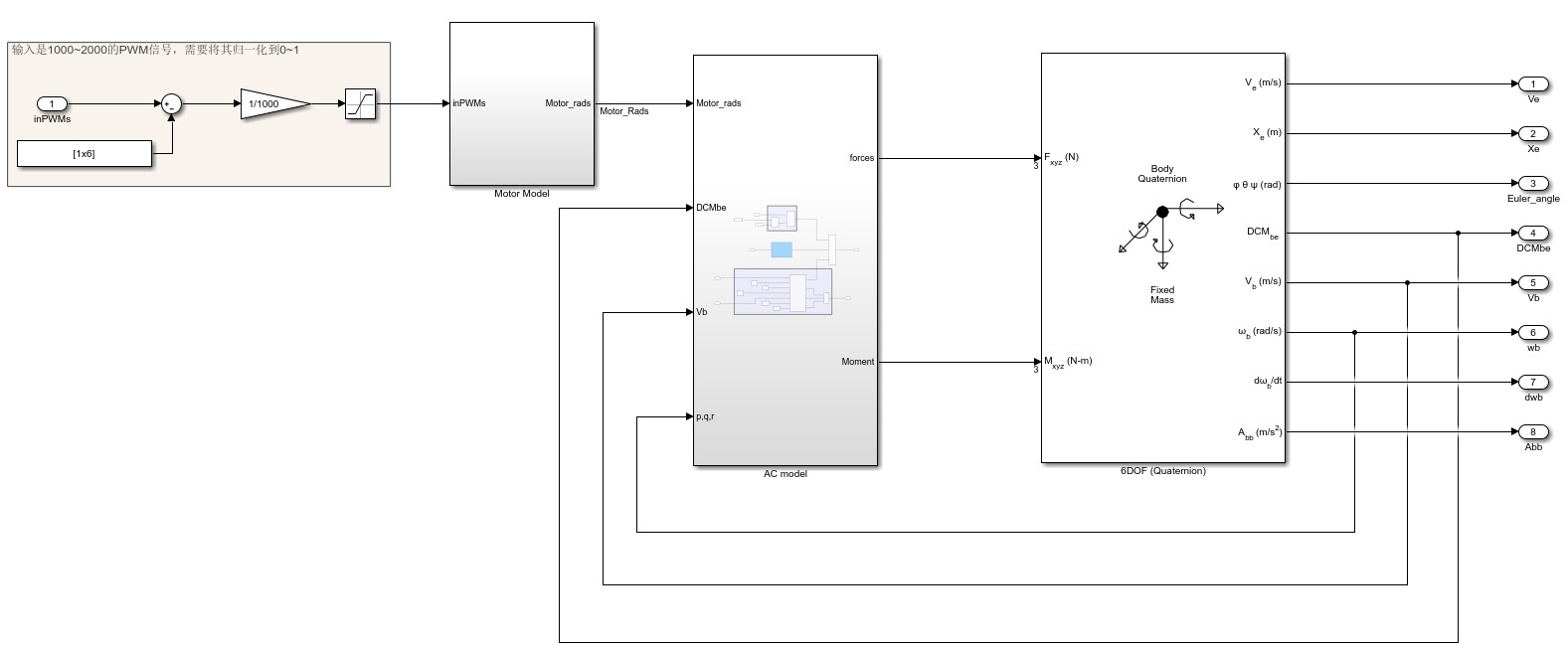

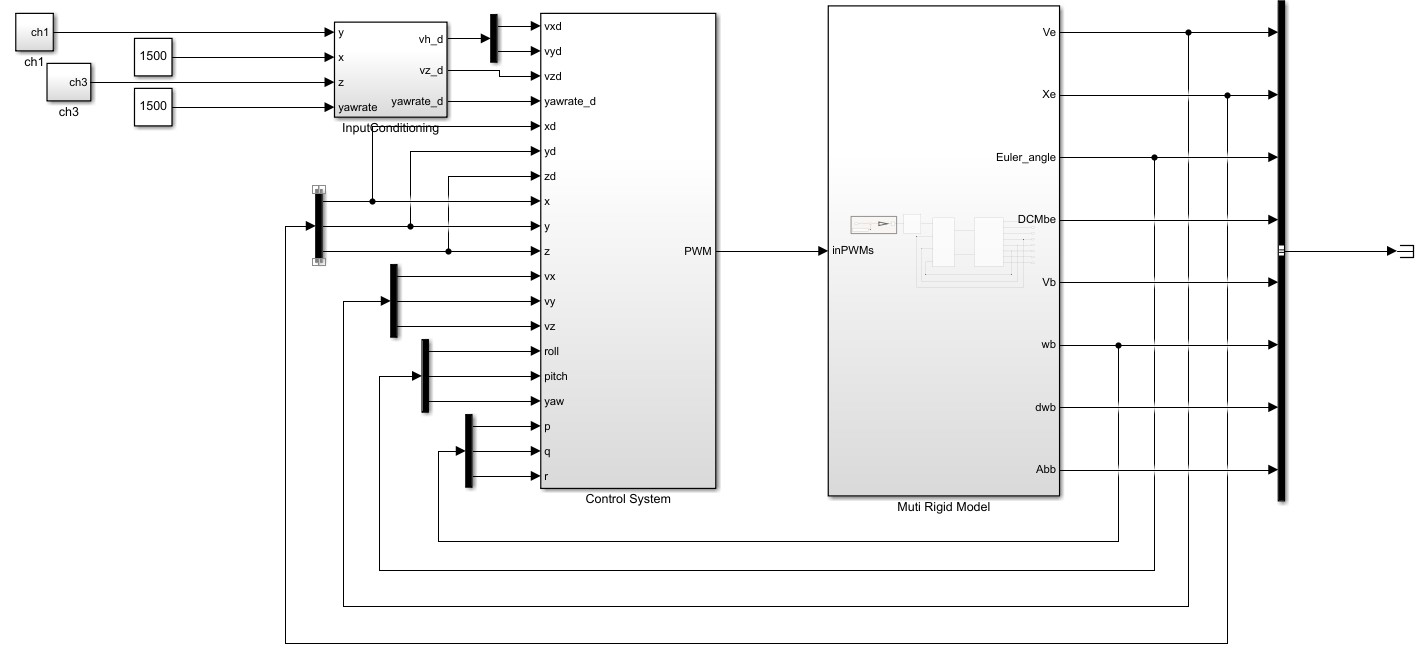
六旋翼飞行器是一种具有六个旋翼的飞行器,通过对旋翼的转速和姿态进行精确控制,实现飞行器在空中的稳定悬停、平稳飞行等动作。PID控制器是一种常用的控制方法,被广泛应用于六旋翼飞行器的控制系统中。本文将围绕六旋翼PID模型展开探讨,结合飞行器本体模型,探究六旋翼飞行器的位置控制、姿态控制、控制分配和电机控制等关键技术。
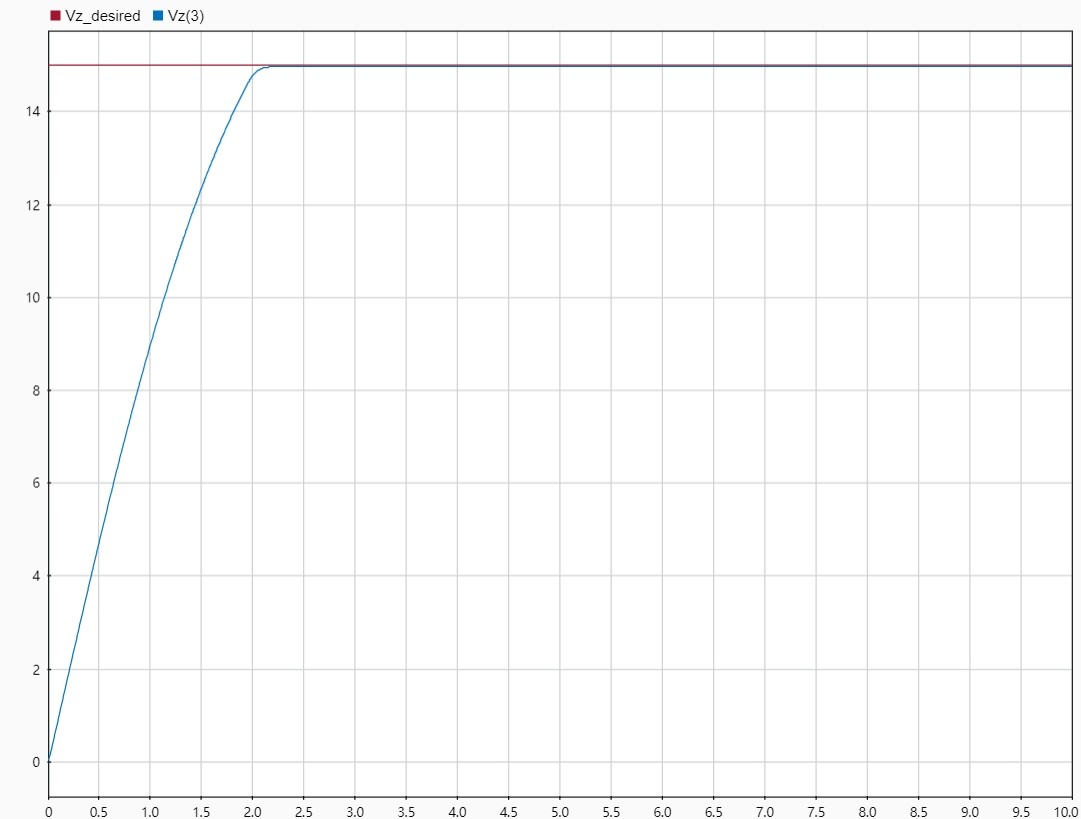
在六旋翼飞行器PID模型中,位置控制是实现飞行器在三维空间内特定位置的控制,通过对飞行器的位置进行实时监测和反馈,通过PID控制器对旋翼的转速进行调节,使飞行器能够精确悬停在目标位置上。姿态控制是指控制飞行器在飞行过程中的倾斜角度,以保持飞行器的平衡和稳定。通过对飞行器的姿态进行实时监测和反馈,通过PID控制器对旋翼的转速进行调节,使飞行器能够保持目标姿态,实现平稳飞行。
控制分配是指将控制指令分配给各个旋翼,以实现飞行器的平稳悬停、平稳飞行等动作。在六旋翼飞行器中,由于存在多个旋翼,每个旋翼对于飞行器的控制起到了不同的作用。通过对飞行器的动力学进行建模,将控制指令进行分配,使各个旋翼能够协同工作,实现飞行器的平稳悬停、平稳飞行等动作。
电机控制是指对飞行器的电机进行速度控制,以实现旋翼的旋转速度和姿态调整。通过PID控制器对电机的输入信号进行调节,控制电机的转速,从而实现对六旋翼飞行器的控制。
在软件方面,Matlab Simulink是一个强大的系统级建模和仿真环境,能够对六旋翼飞行器进行建模、仿真和控制算法的设计。通过Matlab Simulink提供的工具和函数,可以方便地对六旋翼飞行器的PID模型进行建立和仿真
以上相关代码,程序地址:http://matup.cn/699560843112.html















 3355
3355











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









