






 本文详细介绍了PTI模式在伺服中的使用,包括外部脉冲控制和参数设置。重点讲解了PLC发送脉冲驱动伺服的调试过程,以及解决初次上电时的常见错误如F7491等。
本文详细介绍了PTI模式在伺服中的使用,包括外部脉冲控制和参数设置。重点讲解了PLC发送脉冲驱动伺服的调试过程,以及解决初次上电时的常见错误如F7491等。
分为脉冲序列版本(PTI)和PROFINET版本(PN)两种:
支持以下几种运动模式:
1) 外部脉冲位置控制模式(PTI)
2) 内部设定值位置控制模式(IPOS)
3) 速度模式(S)
4) 转矩模式(T)
PTI是伺服应用中最基本使用也是最频繁的模式,今天我们一起来学习如何使用该模式。通过PLC发送高速脉冲来驱动伺服进行定位,对于伺服的调试较为简单,繁琐的是在PLC中编写高速脉冲输出程序。
首先,应该对外部硬件连接.
接下来开始对参数进行调试,可以通过驱动器面板和V-ASSISTANT软件两种方式调试参数,但软件与驱动器连接后面板则无法使用。
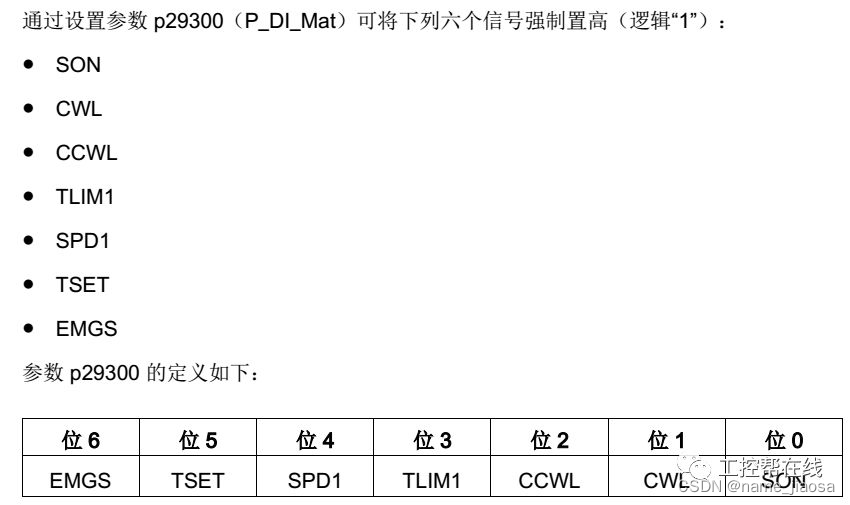
初次上电驱动器未与PLC相连时,常出现F7491 、F7492和A52902号错误。原因为 顺时针行程限制信号(CWL)和逆时针行程限制信号(CCWL)以及急停(EMGS) 这三个信号为OFF。默认必须为ON才可运行,如果实际使用时无需用到这三个功能,可通过把P29300的第1、2、6位设为1来强制为ON,如下图所示。

















 654
654

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









