







系列文章目录
- ros2与turtlebot3仿真教程-目录
- ros2与turtlebot3仿真教程-安装ros2
- ros2与turtlebot3仿真教程-安装turtlebot3
- ros2与turtlebot3仿真教程-启动gazebo不同环境
- ros2与turtlebot3仿真教程-turtlebot3遥控
- ros2与turtlebot3仿真教程-turtlebot3自走避障
- ros2与turtlebot3仿真教程-rviz2模型显示
- ros2与turtlebot3仿真教程-turtlebot3建图
- ros2与turtlebot3仿真教程-turtlebot3导航
说明:
- 介绍如何ros2下实现turtlebot3建图
步骤:
- 新开终端,运行gazebo
$ ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py
- 新开终端,运行建图
$ ros2 launch turtlebot3_cartographer cartographer.launch.py use_sim_time:=True
- 新开终端,启动键盘
$ ros2 run turtlebot3_teleop teleop_keyboard
-
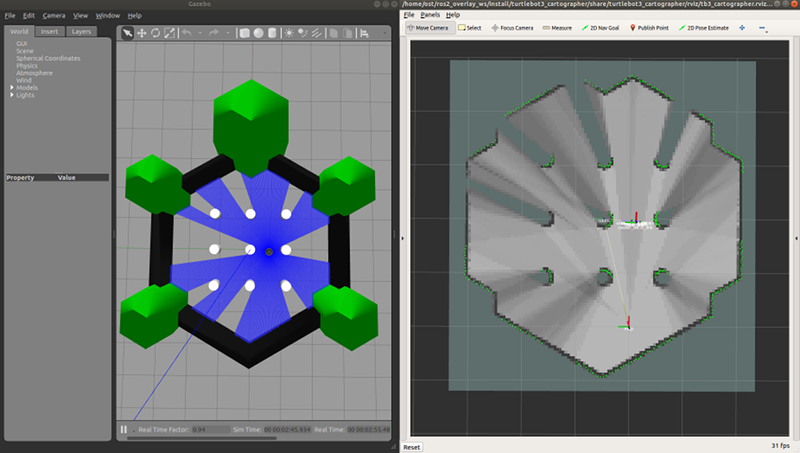
控制小车随机移动,并进行建图,并查看建立的地图,差不多后,保存地图。
-
效果如下:
- 新开终端,保存地图
$ ros2 run nav2_map_server map_saver_cli -f ~/map
- 地图保存在目录下


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









