






目录
摘 要 1
作品内容简介 3
第一章 设计背景及意义 4
1.1机械装置设计背景 4
1.1 机械装置设计意义 7
1.2 植树机发展现状 7
1.4课题研究内容与方法 9
2全自动植树机器人的总体设计 10
2.1 压土夯实模块 15
2.2 智能控制模块 18
3全自动植树机器人的设计计算 20
3.1自主植树模块结构设计 20
30
3.2 拢土夯实模块结构设计 38
3.3 行进部分结构设计 47
4全自动植树机器人装配与干涉检查 49
4.1 全自动植树机器人的装配体建模及爆炸图 49
4.2全自动植树机器人的爆炸视图及干涉分析 50
第四章 创新点 52
第五章 推广应用价值 52
参考文献 53
1.2植树机发展现状
植树机是机械化植树造林的主要设备,多与拖拉机配套使用。按挖坑类型不同植树机分为连续开沟式、间断开沟式和选择挖坑式[4]三种,如图 1-3 所示。
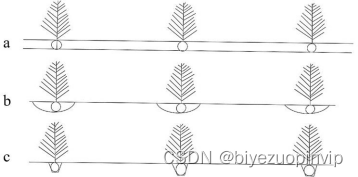
图 1-3 植树机开沟方式
a—连续开沟式;b—间断开沟式;c—选择挖坑式
连续开沟式和间断开沟式植树机在工作时,开沟器切开、破碎和推移土壤, 形成连续(或间断)的栽植沟。苗木按规定的栽植深度和株距被栽入沟内,覆土压实轮随即推拥苗木周围的土壤并压实。这两种机械只适用于平原地区;而且其
破坏地表原有植被很严重,不适用于本来地表植被很少的荒漠化地区。选择挖坑式,可以定点植树,对生态破坏小,可应用于山地、丘陵地带。
我国对于植树机的引进和研发始于 1953 年,经过几十年的发展至今已有了多种型号的植树机械,但是市面上现存的植树机械主要有以下几处缺陷:
植树机械为半自动,需要人工进行控制,植树过程中的人工成本支出较高;
植树机械主要采用燃油提供能量,其排出的废气影响生态环境修复效果且装置消耗化石能源,不符合节能减排要求;
植树机械行进方式单一,不适用于山地、丘陵、荒漠等复杂地形地区;
本团队所设计的基于光伏供能的全自动植树机器人有选择地在适宜的植树 地点松土植树,这使其对土壤的破坏减少、能耗低,提高了苗木的生态适应性、机器的机动性、对不同地面的适应性和机械化程度。
1.4课题研究内容与方法
本课题主要针对全自动植树机器人进行分析和设计,进行机械手的总体方案的制订与机械手总体的结构详细设计.
本文利用SolidWorks软件对所设计的全自动植树机器人进行三维数字化建模,做出主要搬运机械手的零件的三维详细数字化设计,并对三维模型的装配图进行motion运动仿真以及simulation分析。详细设计的全自动植树机器人的主要内容如下面所示一共包括:
(1)学习和掌握全自动植树机器人等相关知识,制定总体设计方案。对搬运机械手进行系统特性的详细分析和设计,研究全自动植树机器人的传动系统详细结构分布图。
(2)运用大学里面所学到的知识,包括材料力学和理论经典力学、动力学分析、大学经典物理学的相关基础知识,然后再通过去查找机械设计手册,完成全自动植树机器人的结构详细设计。
(3)对全自动植树机器人机构的基础零件进行设计,基础零件用SolidWorks三维建模软件进行三维绘制并且装配约束、干涉检测等;
(4)用SolidWorks三维建模motion软件进行对全自动植树机器人机构进行运动仿真;





































 471
471

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









