









1.前言
【1】其实说不上移植笔记,FreeRTOS已经移植至众多平台(MCU),包括MSP430,STM32等,这份笔记完全建立在官方代码的基础之上,简单的说就是修改一些设置从而完成一个呼吸灯实验。
【2】虽然有官方移植代码,但是官方移植版本为STM32的V2.X库,与现在流行的V3.5有比较大的区别。本笔记也是总结网上几篇学习笔记,主要说明如果使用V3.5库,需要做哪些修改。
【3】编译软件为IAR EWARM 6.5。
【相关博文】
【
FreeRTOS学习笔记——任务间使用队列同步数据】——如何使用FreeRTOS队列。
【
如何在FreeRTOS下实现低功耗——MSP430F5438平台】——如何通过空任务实现系统低功耗。
2.FreeRTOS需要哪些文件
FreeRTOS的文件结构非常简单,移植或者版本升级替换也非常方便。
1)与FreeRTOS内核有关的文件数量仅为3个,分别是list.c queue.c tasks.c
该文件位于FreeRTOS\Source
2)与内存分配有关的文件共有4个,分别是heap_1.c,heap_2.c,heap_3.c,heap_4.c。4个文件只需选择其中的1个,STM32选择heap_2.c。
该文件位于FreeRTOS\Source\portable\MemMang
3)与移植相关的代码包括port.c,portasm.s,portmacro.h。这些代码不但和编译器有关还和平台(MCU)有关。FreeRTOS先以编译器为大类,然后再以平台(MCU)为小类。在这里选择IAR编译器,平台为ARM_CM3。
该文件位于FreeRTOS\Source\portable\IAR\ARM_CM3
4)除了上述内容之外,还包括FreeRTOS内核相关的头文件。
该文件FreeRTOS\Source\include
3.必要的工程设置
开始之前需要引入V3.5库相关头文件,启动代码和CMSIS库。
在IAR中设置相关头文件的路径(应根据实际情况修改)
$PROJ_DIR$\CMSIS
$PROJ_DIR$\StdPeriph_Driver\inc
$PROJ_DIR$\User
$PROJ_DIR$\FreeRTOS\Source\include
$PROJ_DIR$\FreeRTOS\Source\portable\IAR\ARM_CM3
当然头文件的路径并不是绝对的,只要明确头文件在哪,设置正确路径即可。
除了设置C代码的相关头文件之外,还需要设置汇编代码的头文件路径,由于很少设置汇编代码头文件路径,往往初次移植FreeRTOS会在此处遇到一些“困难”。(当然也包括我)
由于portasm.s需要FreeRTOSConfig.h中的相关宏定义,所以要根据FreeRTOSConfig.h的位置来设置汇编代码的头文件路径,本例中FreeRTOSConfig.h位于User文件夹,所以设置如下图所示。
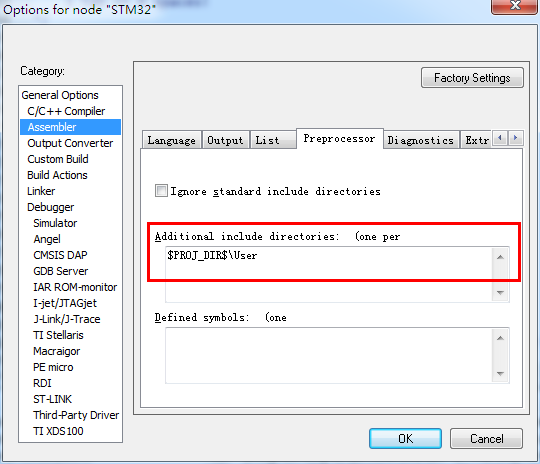
图1 设置ASM头文件搜索路径
4.修改启动代码
由于SVC_Handle,PendSV_Handle和SysTick_Handle在portasm.s中被重定义,所以需要在启动代码中修改这些中断向量的名称,并声明这些中断向量为外部函数。这也是初次使用FreeRTOS容易范的错误。具体修改如下所示。
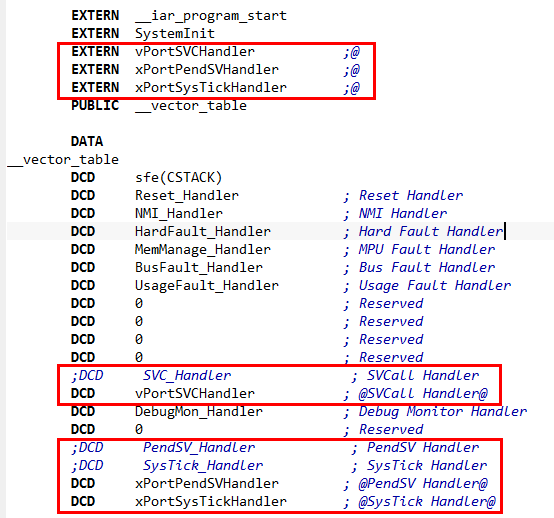
图2 启动代码修改
请注意,在汇编代码中";"代表注释。EXTERN和C语言的extern含义相同——意为外部函数(变量)。
EXTERN __iar_program_start
EXTERN SystemInit
EXTERN vPortSVCHandler ;@
EXTERN xPortPendSVHandler ;@
EXTERN xPortSysTickHandler ;@
PUBLIC __vector_table
声明vPortSVCHandler,xPortPendSVHandler和xPortSysTickHandler为外部函数。
vPortSVCHandler对应SVC_Handler
xPortPendSVHandler对应PendSV_Handle
xPortSysTickHandle对应SysTick_Handle
5.代码实现
经过了以上修改之后,就可以轻松实现基于FreeRTOS的呼吸灯了。代码如下:
6.总结
本人觉得FreeRTOS使用比uCOS简单,虽然FreeRTOS资料远没有uCOS多,但是毕竟uCOS是一个收费产品,而FreeRTOS是一个开源的产品。后面还将会整理一些FreeRTOS的范例代码,希望和大家一起推动FreeRTOS的使用。
【代码链接】
【版本信息】IAR 6.5















 908
908

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









