







前言
PCAN-Basic API 是 PEAK-System Technik GmbH 开发的用于与 CAN 总线通信的 API。以下是一个简单的示例,演示如何在 Windows 环境中使用 PCAN-Basic API 来发送和接收 CAN 消息。
在这个示例中,我将用一个最简单的例子来介绍如何使用 PCAN-Basic API 来发送和接收 CAN 消息。请确保你已经安装了 PEAK PCAN 驱动和相应的 PCAN-Basic API。
1 创建Visual Studio 项目
打开 Visual Studio,创建一个新的项目。
2 添加头文件和库文件
- 将 PCAN-Basic API 的头文件路径添加到项目的 Include 目录。
- 将 PCAN-Basic API 的库文件路径添加到项目的库目录。
- 在项目属性设置中,将 PCANBasic.lib 添加到附加依赖项。
在 Visual Studio 中添加头文件和库文件是一个重要的步骤,让你的项目能够正确地引用和使用 PCAN-Basic API。以下是具体的步骤:
-
添加头文件:
① 打开你的 Visual Studio 项目。
② 在解决方案资源管理器中,右键单击项目名称,然后选择 “属性”。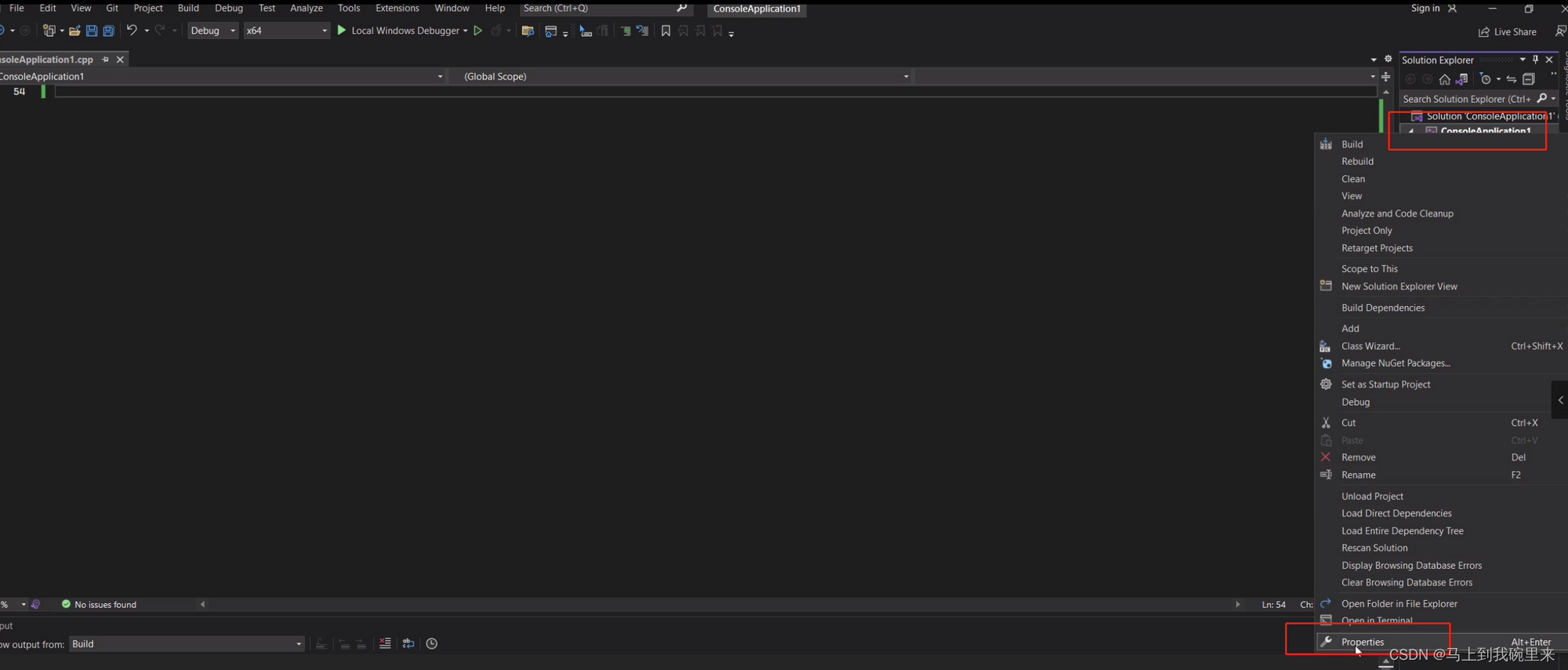
③ 在属性窗口中,选择 “VC++ 目录”。
④ 在 “包含目录” 中,添加 PCAN-Basic API 的头文件路径。这个路径通常是 PCAN-Basic API 安装目录下的 “Include” 文件夹。
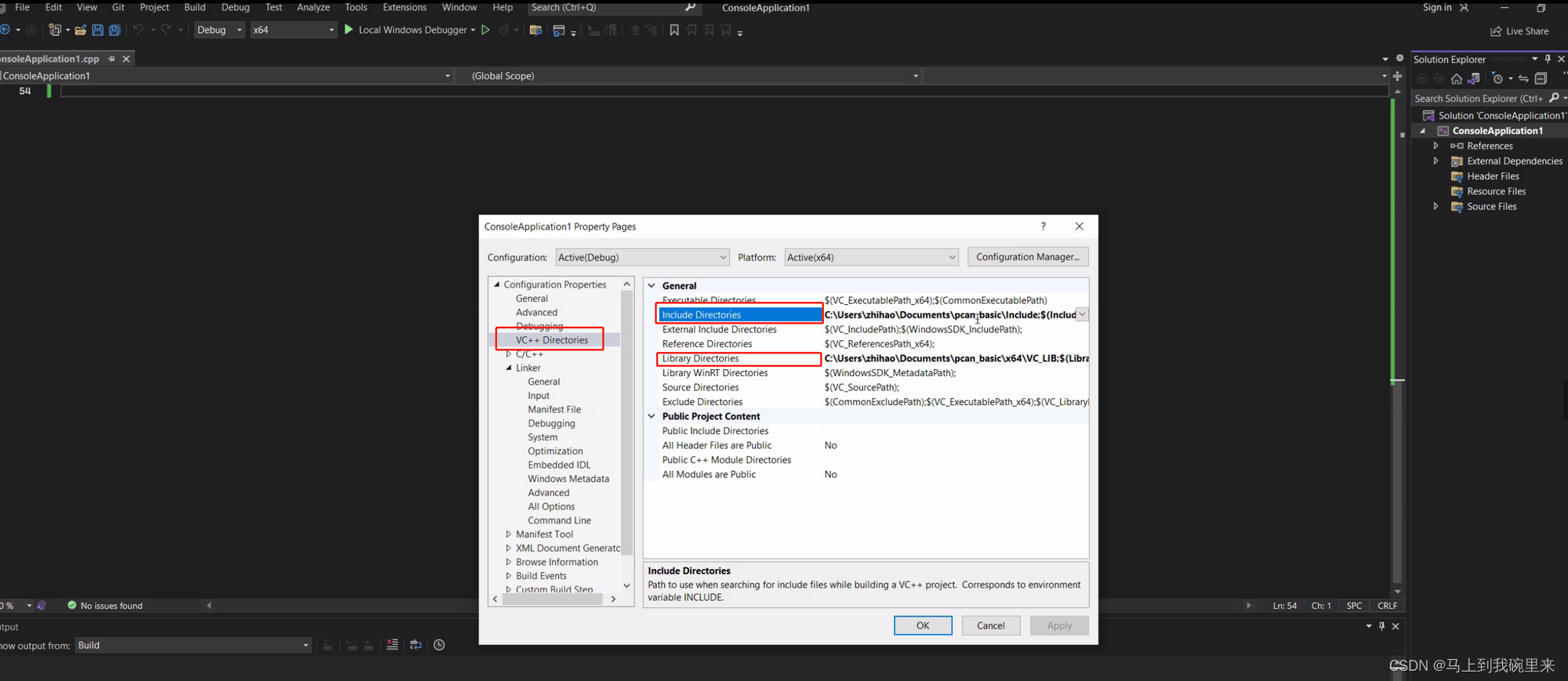
⑤ 点击 “应用” 和 “确定”。
- 添加库文件:
① 在属性窗口中,选择 “VC++ 目录”。
② 在 “库目录” 中,添加 PCAN-Basic API 的库文件路径。这个路径通常是 PCAN-Basic API 安装目录下的 “Lib” 文件夹。
③ 在 “链接器 > 输入” 中,将 “附加依赖项” 设置为PCANBasic.lib。这将链接到 PCAN-Basic API 的库文件。
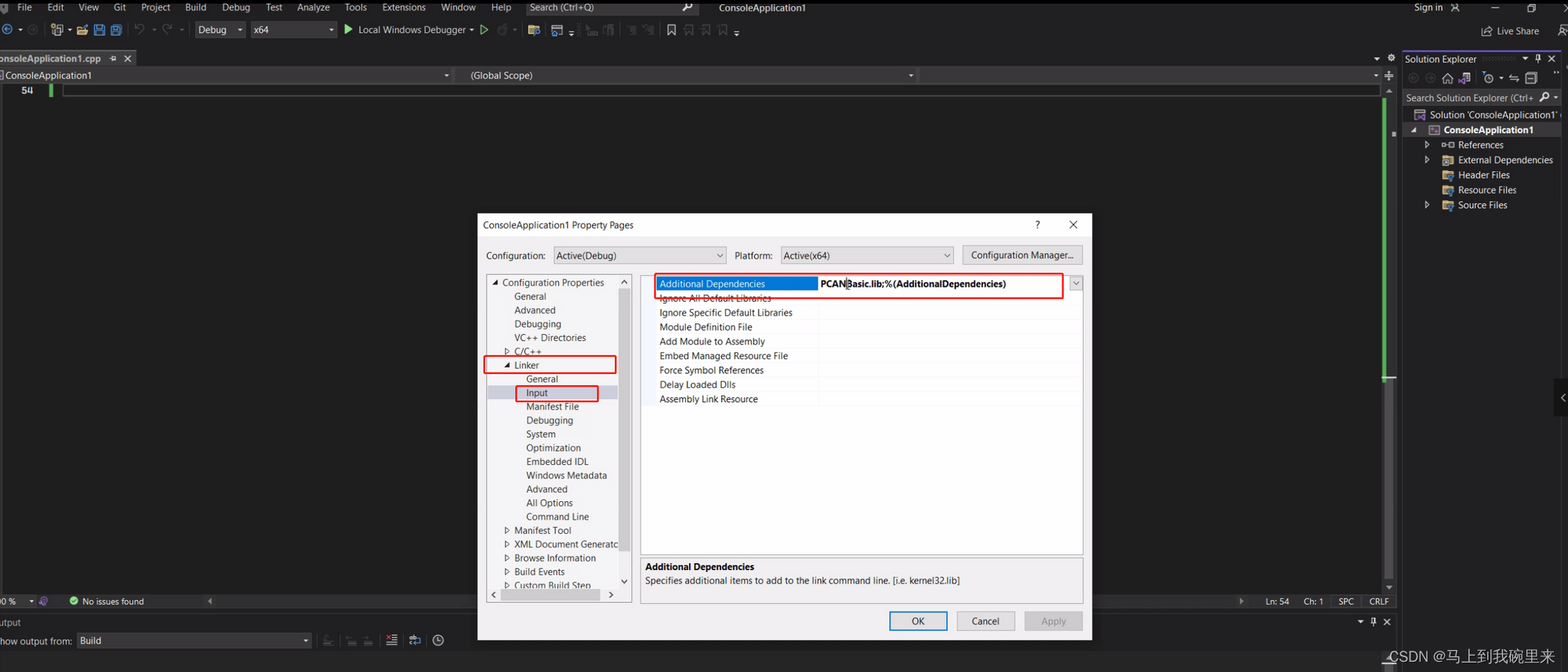
④ 点击 “应用” 和 “确定”。
完成上述步骤后,你的项目应该能够找到 PCAN-Basic API 的头文件和库文件,从而在编译和链接时正确引用 API。
请注意,确保你已经正确安装了 PCAN 驱动和相关的 PCAN-Basic API。如果你在添加头文件和库文件时遇到问题,可以参考 PCAN-Basic API 的文档或官方指南,以获取更详细的步骤和信息。
3 代码示例
#include <iostream>
#include <windows.h>
#include "PCANBasic.h"
int main()
{
TPCANStatus status;
TPCANHandle hnd;
TPCANMsg canMsg;
// 初始化 PCAN-Basic API
status = CAN_Initialize(PCAN_USBBUS1, PCAN_BAUD_500K, 0, 0, 0);
if (status != PCAN_ERROR_OK)
{
std::cout << "初始化失败:" << status << std::endl;
return 1;
}
// 准备 CAN 消息
canMsg.ID = 0x123;
canMsg.LEN = 8;
canMsg.MSGTYPE = PCAN_MESSAGE_STANDARD;
for (int i = 0; i < 8; i++)
canMsg.DATA[i] = i;
// 发送 CAN 消息
status = CAN_Write(PCAN_USBBUS1, &canMsg);
if (status != PCAN_ERROR_OK)
{
std::cout << "发送失败:" << status << std::endl;
return 1;
}
// 接收 CAN 消息
status = CAN_Read(PCAN_USBBUS1, &canMsg, nullptr);
if (status == PCAN_ERROR_OK)
{
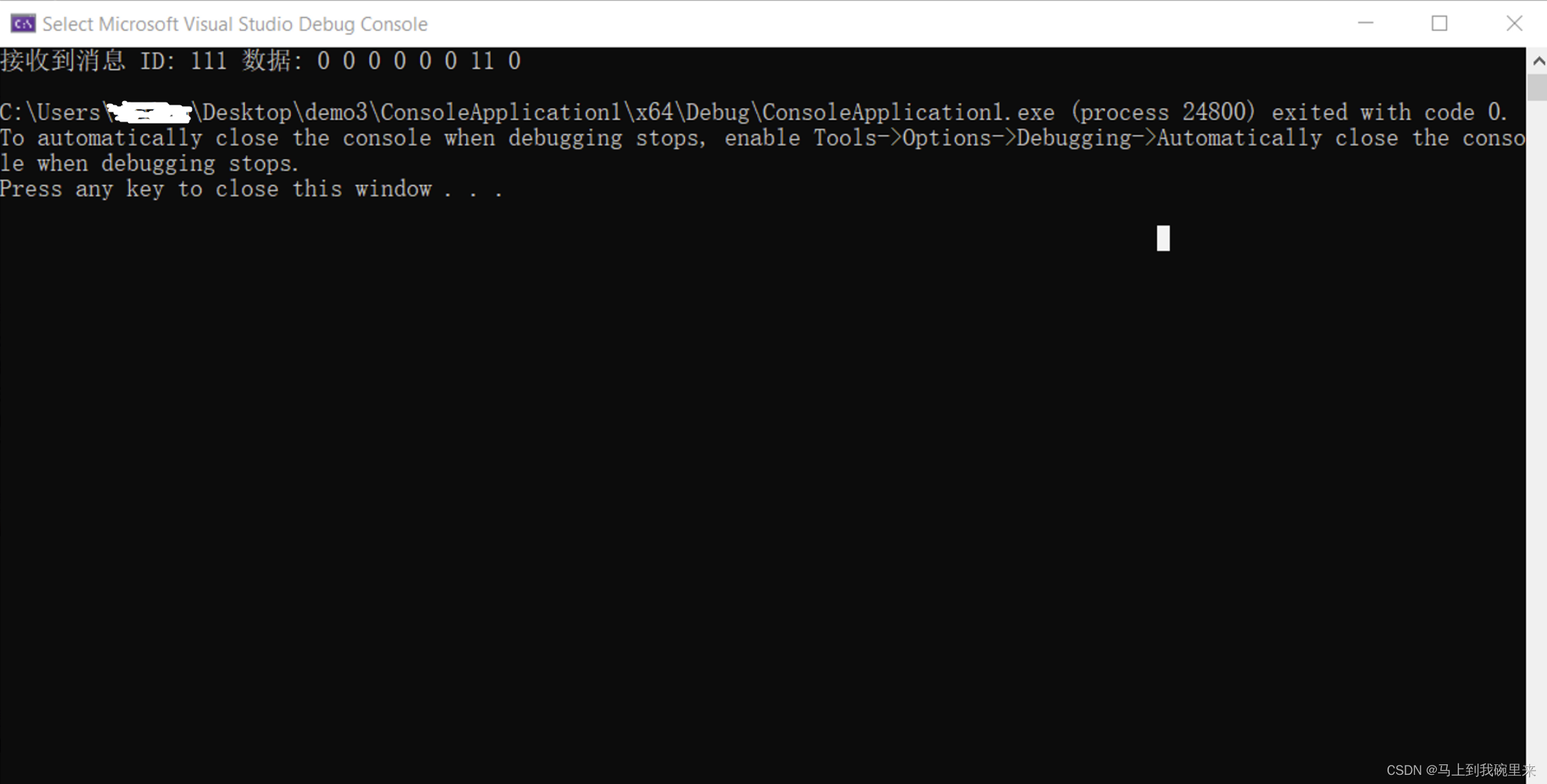
std::cout << "接收到消息 ID: " << std::hex << canMsg.ID << " 数据: ";
for (int i = 0; i < canMsg.LEN; i++)
std::cout << std::hex << static_cast<int>(canMsg.DATA[i]) << " ";
std::cout << std::dec << std::endl;
}
else
{
std::cout << "接收失败:" << status << std::endl;
return 1;
}
// 关闭 PCAN-Basic API
status = CAN_Uninitialize(PCAN_USBBUS1);
if (status != PCAN_ERROR_OK)
{
std::cout << "关闭失败:" << status << std::endl;
return 1;
}
return 0;
}
以上代码需要根据实际工程的情况修改 PCAN 通道、波特率以及发送/接收的 CAN 消息。此示例演示了初始化 PCAN-Basic API、发送 CAN 消息、接收 CAN 消息和关闭 PCAN-Basic API 的基本步骤。
4 Q&A
关于通道的设置问题
在PCAN-Basic库中,CAN_Initialize函数用于初始化CAN通道。在你的代码中,初始化的时候使用了PCAN_USBBUS1作为CAN通道的参数,表示使用第一个USB-CAN通道。这个参数可以根据你的硬件连接情况进行调整。
在PCAN-Basic库中,TPCANHandle类型表示CAN通道的句柄。常见的CAN通道句柄包括:
PCAN_USBBUS1: 第一个USB-CAN通道PCAN_USBBUS2: 第二个USB-CAN通道PCAN_PCIBUS1: 第一个PCI-CAN通道PCAN_PCIBUS2: 第二个PCI-CAN通道
等等。你可以根据你的硬件配置选择合适的通道句柄。如果你的设备连接在其他CAN通道上,需要相应地修改CAN_Initialize函数的第一个参数。
例如,如果你的设备连接在第二个USB-CAN通道上,你可以将初始化函数的第一个参数修改为PCAN_USBBUS2:
status = CAN_Initialize(PCAN_USBBUS2, PCAN_BAUD_500K, 0, 0, 0);
确保选择的通道与硬件连接匹配,否则将无法正常初始化CAN通道。


















 4513
4513

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









