







 文章通过物理原理和编程模拟了不同初始角度(30/45/60度)下弹片的飞行轨迹,并运用二分法寻找最大飞行距离对应的初始角度。程序使用Python实现,结合数学和物理知识,计算出在给定条件下的弹片运动路径和最优化角度(约18.57度)。
文章通过物理原理和编程模拟了不同初始角度(30/45/60度)下弹片的飞行轨迹,并运用二分法寻找最大飞行距离对应的初始角度。程序使用Python实现,结合数学和物理知识,计算出在给定条件下的弹片运动路径和最优化角度(约18.57度)。
一. 问题描述
弹片飞行轨迹是多重因素影响的抛物线问题:炸药赋予弹片初速, 重力始终控制弹片向地面运动,空气阻力和弹片飞行速度相关,方向始终和弹片飞行方向相 反以阻止弹片无限制运动。假设给定弹片初速为 1000m/s,重力加速度为 9.8m/s2,空气阻 力系数为-k*v*v(k 为常数,取 0.003 或其他指定数值,v 为弹片当前速度),请给出特定速 度方向(30/45/60 度)的弹片飞行轨迹,并算出最大飞行距离时的弹片抛射角度。
二. 结果展示
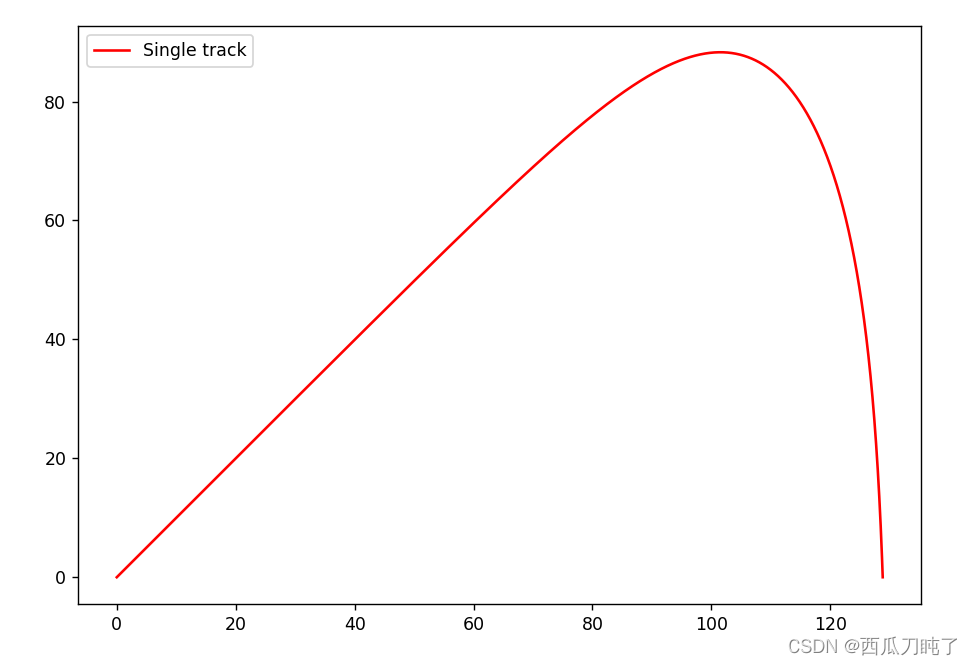
1. 参数为:初始角度45度时:
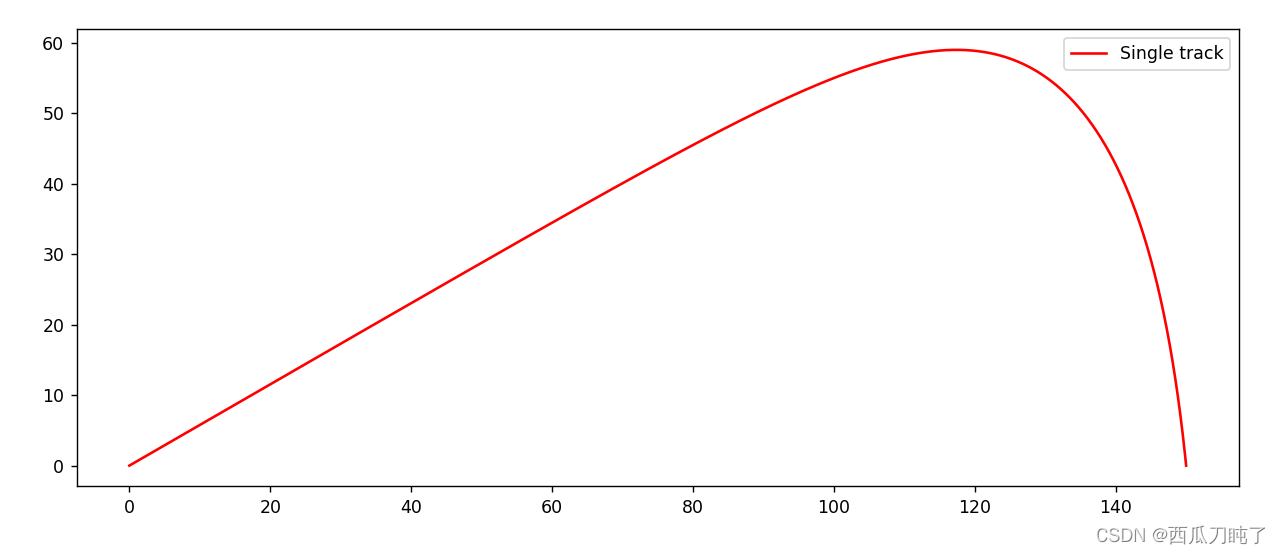
2. 初始角度为30度时:
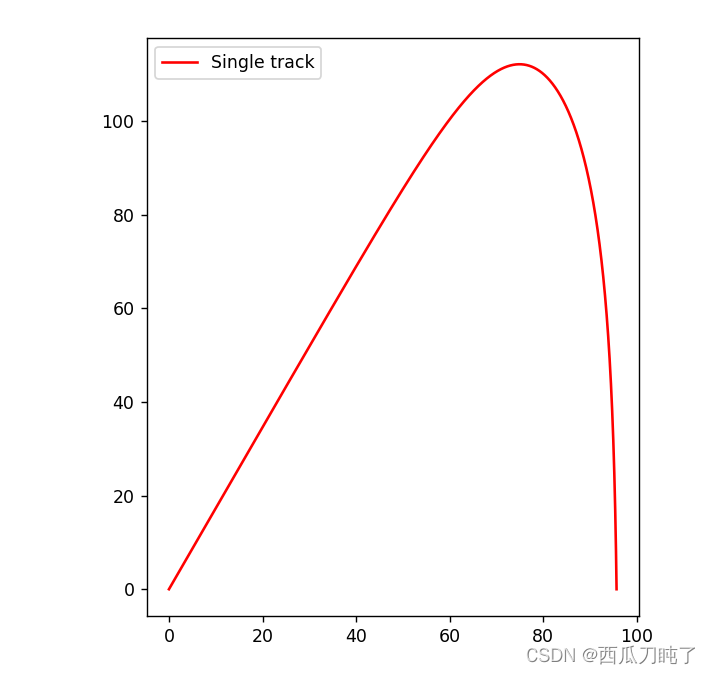
3. 初始角度为60度时:
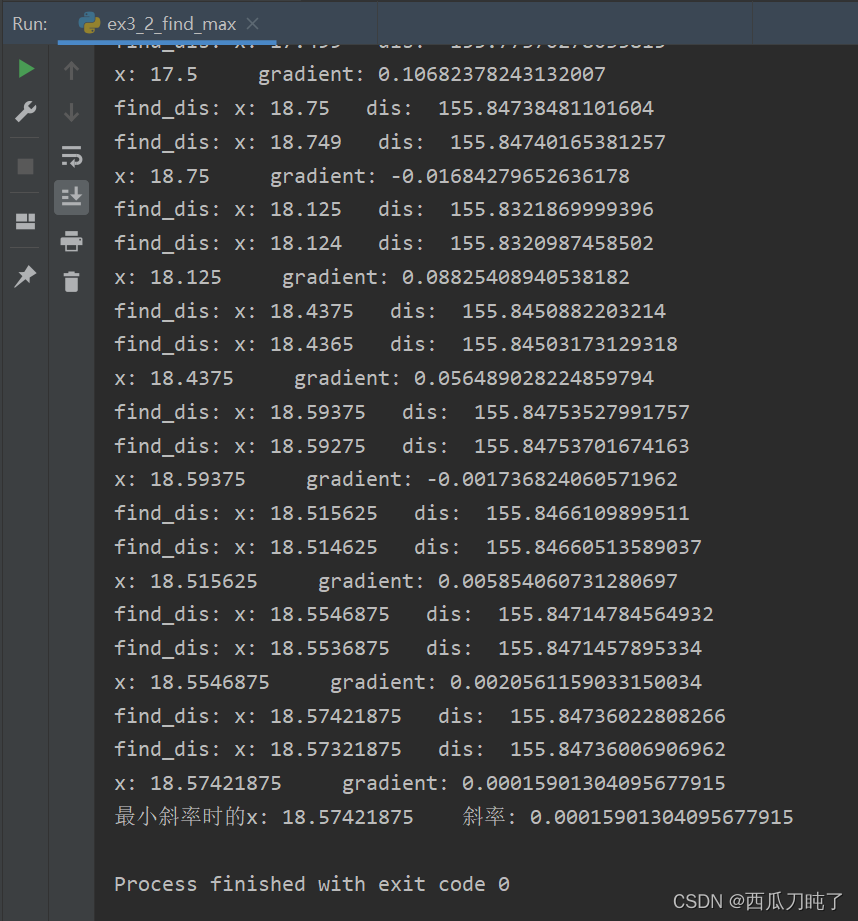
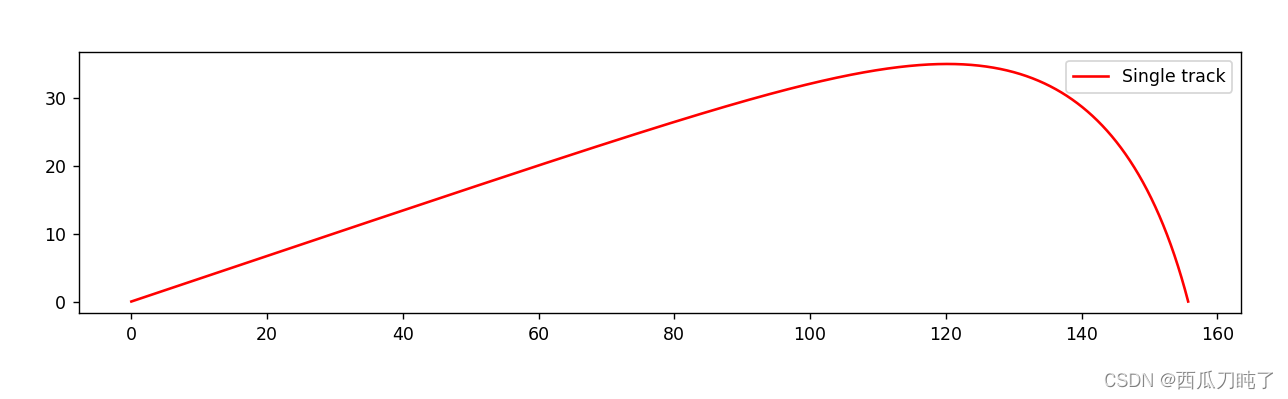
4. 最远飞行轨迹下的初始角度计算:
计算迭代过程:
初始角度为18.57度时的轨迹展示:
三. 解题思路
1. 使用单步模拟法, 依据物理原理, 计算出每一小步的值,存入list,最后统一输出.
2. 对于最大飞行距离时的弹片抛射角度问题,
首先我们设想, 飞行距离 y 相对于 初始角度 x 是一个先增后减的函数, 那么,对于这个函数极值的求解, 可转化为求导后, 零点的求解. 因此, 采用此思想求解.
但是, 实际中还有一些问题, 任何一个初始角度的飞行距离都要进行模拟计算, 如果直接暴力排列,则非常消耗计算资源.(由于我们第一步, step设置为0.0001,即0.0001秒当成一个直线运动,之后重新计算角度, 重新模拟, 精度非常高)因此, 对于此问题, 设计二分斜率查找法.
采用二分斜率查找的方法, 首先设置初始最大角度30°, 最小角度10°, 采用二分法,每一次记录mid角度时, 的最远距离. 此时判断斜率是正还是负, 如果是负的 ,则把up_bound = mid_bound, 反之同理, 同时计算出第二次mid角度时,最远距离,继续迭代判断.
最终设置两次斜率差值 小于设置的精度时(0.001), 完成计算, 即最终迭代计算出斜率为0.0001590的时候,终止了迭代,(经过多次尝试,精度再进一步, python 数字精度的损失要大于算法精度的损失, 对于编程语言无法模拟无理数的问题, 目前我也无法解决.)
四. 程序源码
1. 弹片飞行轨迹模拟
import math
import matplotlib.pyplot as plt
def draw(x, y):
plt.figure(figsize=(12, 6))
plt.plot(x, y, c='red', label='Single track')
plt.legend()
plt.gca().set_aspect(1)
plt.show()
def main():
step = 0.0001
initial_speed = 1000
initial_angle = 18.57
g = 9.8
k = 0.003
m = 0.1
# 横纵坐标初1
# 计算结果
x_list = [0]
y_list = [0]
# 坐标
x = 0
y = 0
v = initial_speed
v_y = v * math.sin(math.radians(initial_angle))
v_x = v * math.cos(math.radians(initial_angle))
angle = math.radians(initial_angle)
while y >= 0 and v > 0:
f = k * v * v
a_f = f / m
a_f_y = a_f * math.sin(angle)
a_f_x = a_f * math.cos(angle)
v_y = v_y - g * step - a_f_y * step
v_x = v_x - a_f_x * step
x1 = x + v_x * step
y1 = y + v_y * step
x_list.append(x1)
y_list.append(y1)
# 更新相关参数
v = math.sqrt(v_y * v_y + v_x * v_x)
angle = math.atan((y1 - y) / (x1 - x))
# if x1 - x > 0:
# angle = math.atan((y1 - y) / (x1 - x))
# else:
# angle = math.radians(-90)
x = x1
y = y1
print(x_list)
print(y_list)
draw(x_list, y_list)
print("max_x : " + str(x_list.pop()))
if __name__ == '__main__':
main()
2. 最远时的角度求解
import math
import matplotlib.pyplot as plt
def draw(x, y):
plt.figure(figsize=(12, 6))
plt.plot(x, y, c='red', label='Single track')
plt.legend()
plt.show()
def find_dis(angle):
step = 0.00001
initial_speed = 1000
initial_angle = angle
g = 9.8
k = 0.003
m = 0.1
# 横纵坐标初1
# 计算结果
x_list = [0]
y_list = [0]
# 坐标
x = 0
y = 0
v = initial_speed
v_y = v * math.sin(math.radians(initial_angle))
v_x = v * math.cos(math.radians(initial_angle))
angle = math.radians(initial_angle)
while y >= 0 and v > 0:
f = k * v * v
a_f = f / m
a_f_y = a_f * math.sin(angle)
a_f_x = a_f * math.cos(angle)
v_y = v_y - g * step - a_f_y * step
v_x = v_x - a_f_x * step
x1 = x + v_x * step
y1 = y + v_y * step
x_list.append(x1)
y_list.append(y1)
# 更新相关参数
v = math.sqrt(v_y * v_y + v_x * v_x)
angle = math.atan((y1 - y) / (x1 - x))
# if x1 - x > 0:
# angle = math.atan((y1 - y) / (x1 - x))
# else:
# angle = math.radians(-90)
x = x1
y = y1
# print(x_list)
# print(y_list)
# draw(x_list, y_list)
pop = x_list.pop()
print("find_dis: x: " + str(initial_angle) + " dis: " + str(pop))
return pop
def find_angle():
delta = 0.001
max_x = 0.0
gradient = 10.0 # 初始斜率,无穷大
up_bound = 30.0
low_bound = 10.0
mid_bound = 20.0
precision = 0.001
while abs(gradient) > precision:
mid_bound = (up_bound + low_bound) / 2
now_gradient = (find_dis(mid_bound) - find_dis(mid_bound - delta)) / delta
if now_gradient < 0:
up_bound = mid_bound
else:
low_bound = mid_bound
print("x: " + str(mid_bound) + " gradient: " + str(now_gradient))
if abs(now_gradient) < gradient:
gradient = abs(now_gradient)
elif now_gradient == gradient:
precision /= 10
delta /= 10
pass
print("最小斜率时的x: " + str(mid_bound) + " 斜率: " + str(gradient))
if __name__ == '__main__':
find_angle()
pass

















 544
544

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









