






从零学习自动驾驶Lattice规划算法(下) 轨迹采样 轨迹评估 碰撞检测
包含matlab代码实现和cpp代码实现,方便对照学习。
cpp代码用vs2019编译 依赖qt5.15做可视化
更新:
1 优化绘图
2 增加轨迹预测模块
3 增加从mat文件加载场景的功能,方便场景自定义
ID:99120693209878081
autorobot
标题:自动驾驶Lattice规划算法的轨迹采样、评估和碰撞检测
引言:
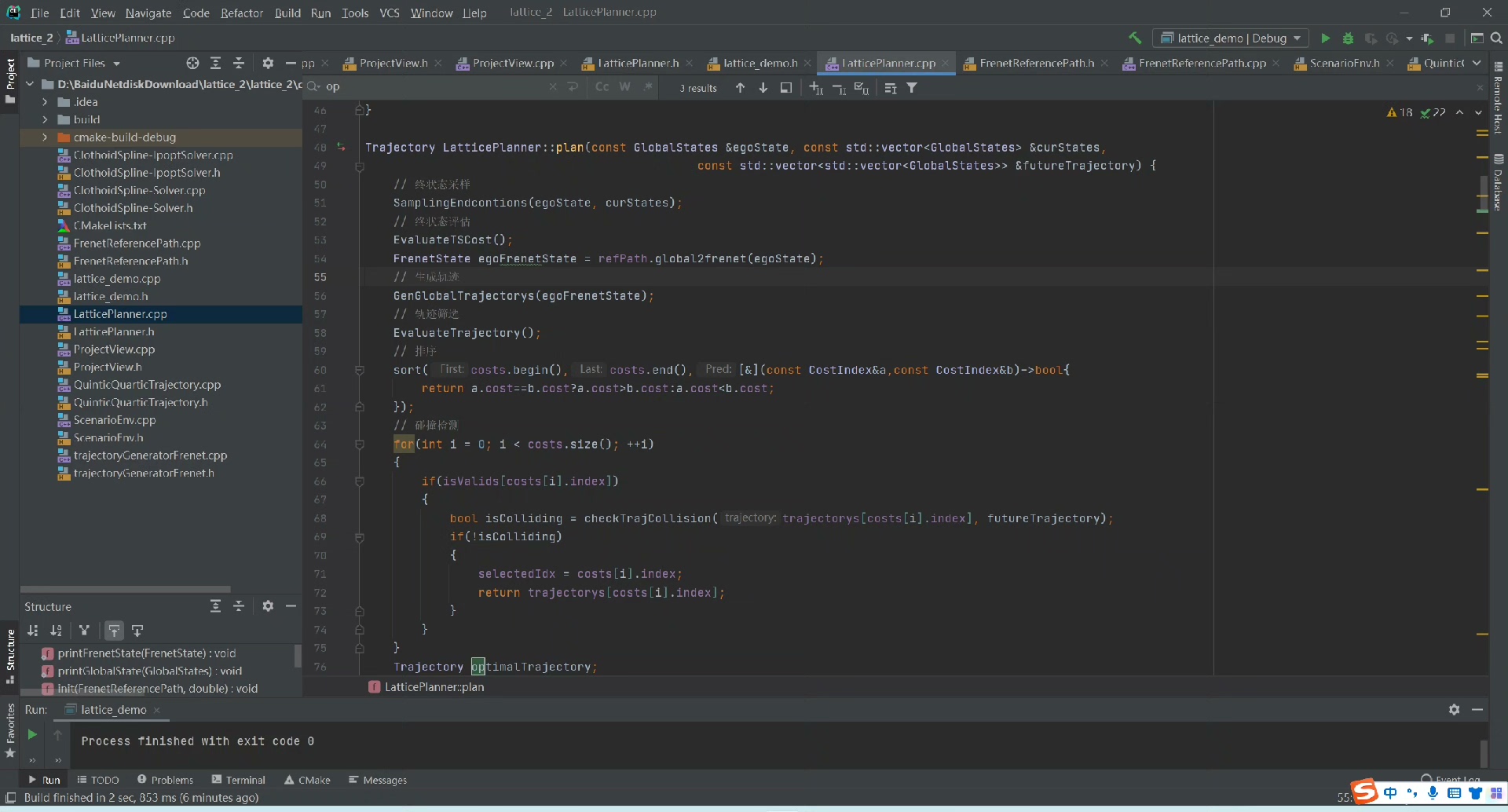
自动驾驶技术在近年来取得了巨大的发展,其中规划算法在实现车辆安全、高效行驶方面起着重要的作用。本文将从零开始介绍自动驾驶Lattice规划算法的轨迹采样、评估和碰撞检测。我们将讨论此算法的实现,并提供了Matlab代码和C++代码的对照学习,同时使用VS2019编译C++代码,并依赖Qt5.15来实现可视化。
-
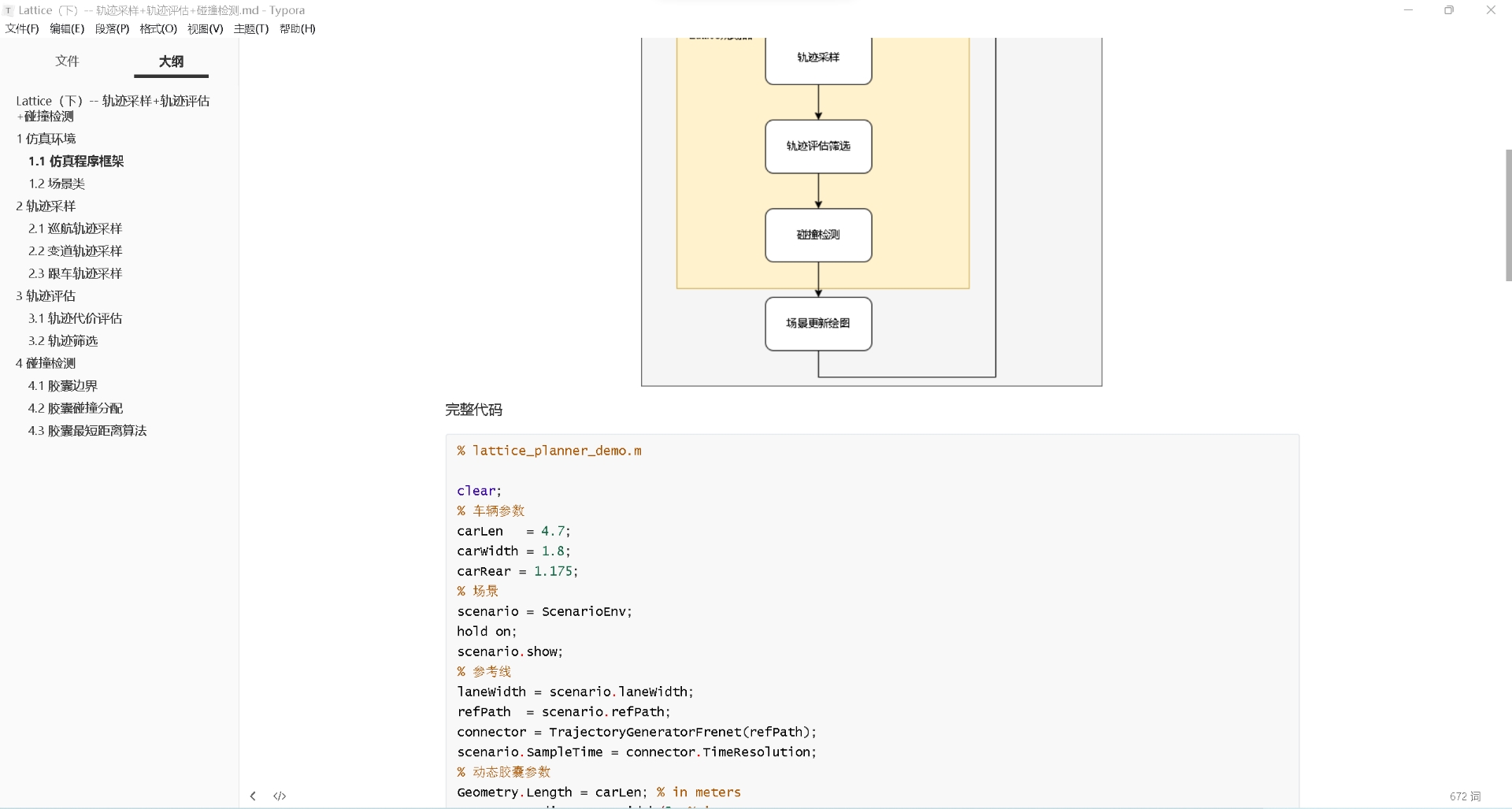
轨迹采样
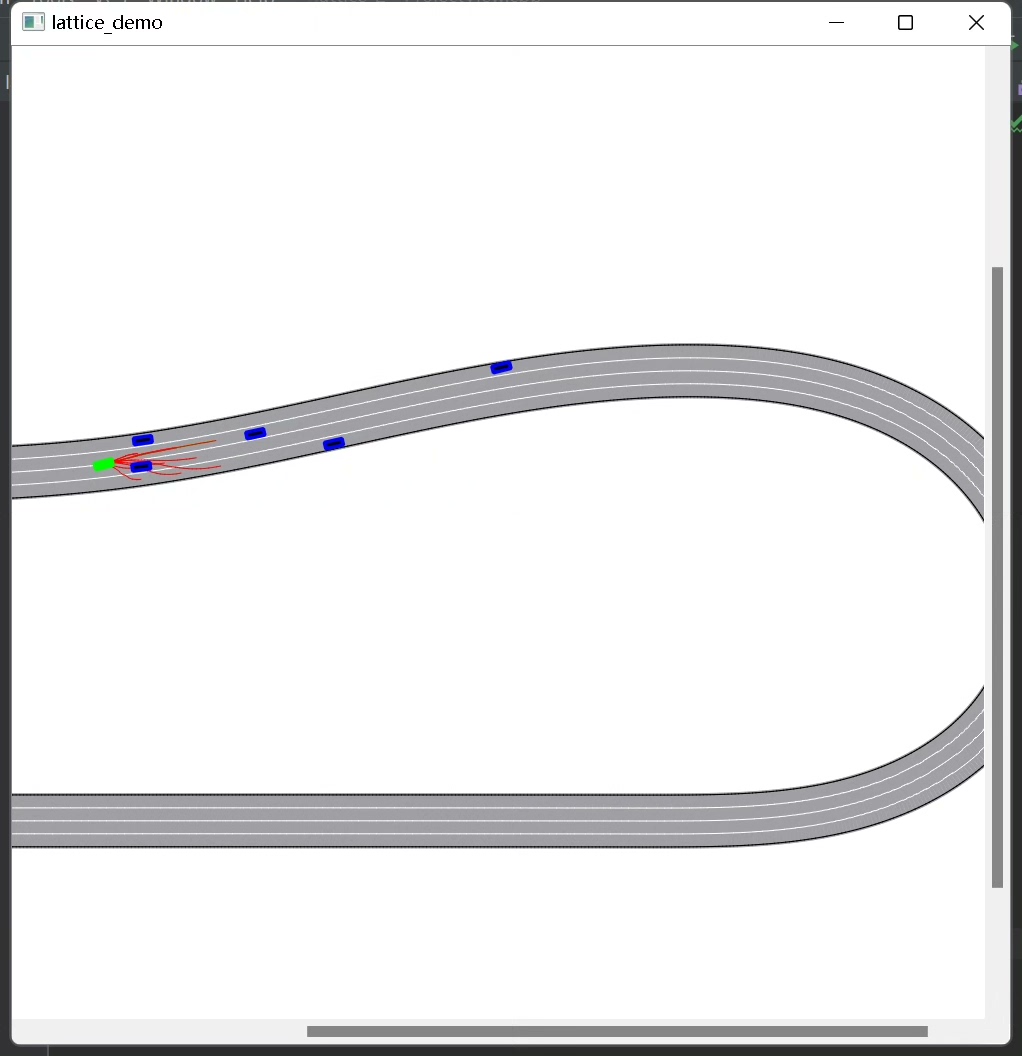
轨迹采样是自动驾驶Lattice规划算法的第一步,它负责生成一系列可能的车辆轨迹。在我们的实现中,我们提供了Matlab代码和C++代码的示例,方便读者进行对照学习。通过对车辆运动学模型的建模,我们可以根据车辆的状态和环境信息,生成一系列可能的轨迹。 -
轨迹评估
生成轨迹后,我们需要对这些轨迹进行评估,以确定最佳的轨迹。在评估过程中,我们考虑了多个指标,如舒适度、安全性和行驶效率。通过综合考虑这些指标,我们可以为每条轨迹分配一个评分,从而找到最佳的轨迹。 -
碰撞检测
在自动驾驶过程中,碰撞检测是非常重要的一环。我们需要确保生成的轨迹不会与障碍物发生碰撞。在本文的实现中,我们使用了基于几何形状的碰撞检测方法。通过将车辆和障碍物建模为几何形状,我们可以有效地检测是否会发生碰撞,并及时做出相应的调整。
更新内容:
-
优化绘图:
我们对绘图模块进行了一系列的优化。通过采用更高效的绘图算法和图像处理技术,我们实现了更流畅、更精确的轨迹可视化效果。 -
增加轨迹预测模块:
为了更好地适应多样化的路况和交通状况,我们增加了轨迹预测模块。该模块可以根据历史数据和当前环境信息,预测未来一段时间内的道路情况,并据此调整生成的轨迹。 -
增加从Mat文件加载场景的功能:
为了方便用户自定义场景,我们增加了从Mat文件加载场景的功能。用户可以通过准备好的Mat文件,导入不同的场景信息,以便进行相关的仿真实验和验证。
结论:
通过本文的介绍,读者可以从零开始学习自动驾驶Lattice规划算法的轨迹采样、评估和碰撞检测的原理和实现方法。通过提供Matlab代码和C++代码的对照学习,读者可以更好地理解算法的实际应用。此外,我们还对绘图模块进行了优化,并增加了轨迹预测模块和从Mat文件加载场景的功能,以提升算法的性能和灵活性。希望本文对读者在自动驾驶技术的学习和实践中能够有所帮助。
注:本文仅为技术分析文章,不涉及价格、退货和售后等商业关键词。
【相关代码 程序地址】: http://nodep.cn/693209878081.html















 2769
2769

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









