







基于I2C总线通信协议的温度采集实验(基于AHT20)
I2C总线通信协议 简介
一.I2C是什么?
I2C总线是PHLIPS公司在20世纪80年代推出的一种串行总线。具有引脚少,硬件实现简单,可扩展性强的优点。I2C总线的另一优点是支持多主控,总线上任何能够进行发送/接收数据的设备都可以占领总线。当然,任意时间点上只能存在一个主控。
I2C即是一种总线,也是一种通讯协议。在嵌入式开发中,通讯协议可分为两层:物理层和协议层。物理层是数据在物理媒介传输的保障;协议层主要是规定通讯逻辑,同一收发双方的数据打包、解包标准。打个比方,物理层相当于现实中的公路,而协议层则是交通规则,汽车可以在路上行驶,但是需要交通规则对行驶规则进行约束,不然将出现危险,也就是数据传输紊乱、丢包。
I2C的图示
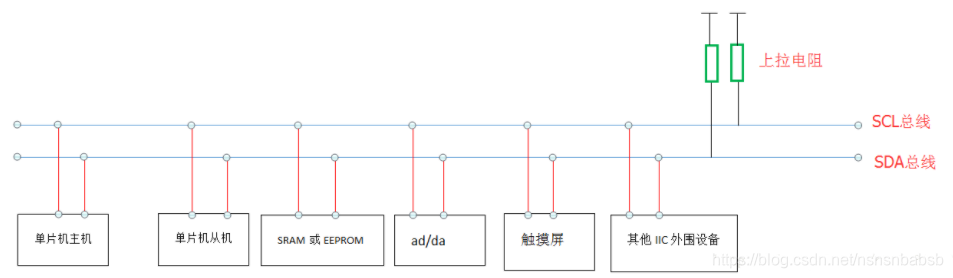
(1) 在I2C通讯总线上,可连接多个I2C通讯设备,支持多个通讯主机和多个通讯从机
(2) I2C通讯只需要两条双向总线:串行数据线(SDA),串行时钟线(SCL)。数据线用于传输数据,时钟线用于同步数据收发
(3) 每个连接到总线的设备都有一个独立的地址,主机正是利用该地址对设备进行访问
(4) SDA和SCL总线都需要接上上拉电阻,当总线空闲时,两根线均为高电平。连接到总线上的任意器件输出低电平都会将总线信号拉低。即各器件的SDA和SCL都是线与的关系
(5) 多个主机同时使用总线时,需要用仲裁方式决定哪个设备占用总线,不然数据将会产生冲突
二、I2C协议包括哪几种,它们的区别是什么:
I2C协议包括“软件I2C”和“硬件I2C”
所谓硬件I2C对应bai芯片上的I2C外设,有相应I2C驱动电路,其所使用的I2C管脚也是专用的
软件I2C一般是用GPIO管脚,用软件控制管脚状态以模拟I2C通信波形。
区别:
硬件I2C的效率要远高于软件的,而软件I2C由于不受管脚限制,接口比较灵活。
模拟I2C 是通过GPIO,软件模拟寄存器的工作方式,而硬件(固件)I2C是直接调用内部寄存器进行配置。如果要从具体硬件上来看,可以去看下芯片手册。因为固件I2C的端口是固定的,所以会有所区别。
至于如何区分它们
可以看底层配置,比如IO口配置,如果配置了IO口的功能(IIC功能)那就是固件IIC,否则就是模拟
可以看IIC写函数,看里面有木有调用现成的函数或者给某个寄存器赋值,如果有,则肯定是固件IIC功能,没有的话肯定是数据一个bit一个bit模拟发生送的,肯定用到了循环,则为模拟。
根据代码量判断,模拟的代码量肯定比固件的要大。
三、I2C总线的些特征:
●只要求两条总线线路一 条串行数据线SDA -条串行时钟线SCL
●每个连接到总线的器件都可以通过唯一的地址和一 直存在的简单的主机从机关系软件设
定地址主机可以作为主机发送器或主机接收器
●它是一个真正的多主机总线如果两个或更多主机同时初始化数据传输可以通过冲突检测
和仲裁防止数据被破坏
●串行的8位双向数据传输位速率在标准模式下可达100kbit/s 快速模式下可达400kbit/s
高速模式下可达3.4Mbit/s .
●片上的滤波器可以滤去总线数据线上的毛刺波保证数据完整
●连接到相同总线的IC数量只受到总线的最大电容400pF 限制
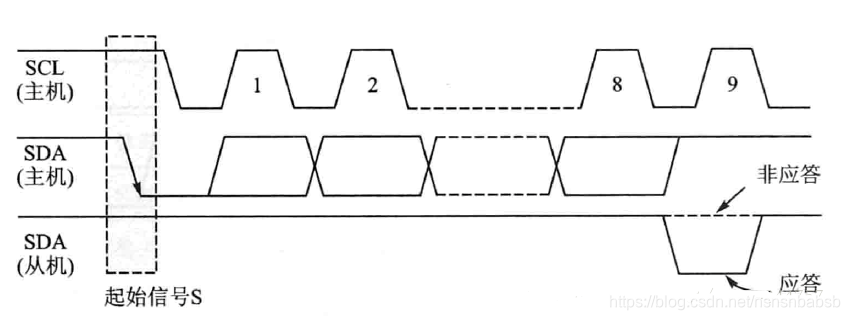
四.I2C总线在传送数据过程中共有三种类型信号:开始信号、结束信号和应答信号。
开始信号: SCL 为高电平时,SDA由高电平向低电平跳变,开始传送数据。
结束信号: SCL 为高电平时,SDA由低电平向高电平跳变,结束传送数据。
应答信号:接收数据的IC在接收到8bit数据后,向发送数据的IC发出特定的低电平脉
冲,表示已收到数据
五.数据传输
AHT20简介
详细介绍请转到博主的另一篇博客链接: 博客.
2020年上市,奥松生产;
3mmx3mmx1mm 超小体积;
经过标定的数字信号,标准I2C输出格式;
由一个电容式湿度传感元件和一个标准的片上温度传感元件组成;
采用SMD封装适于回流焊;
响应迅速、抗干扰能力强;
AHT20 的供电范围为 2.0-5.5V, 推荐电压为3.3V。

一.项目说明
1)实战目标:
博主今天将会带领大家一起通过以下的练习,一起学习我们的I2C协议
1. 学习I2C总线通信协议,完成基于I2C硬件协议的AHT20温湿度传感器的数据采集,并将采集的温度-湿度值通过串口输出。具体任务:
1)解释什么是“软件I2C”和“硬件I2C”?
2)阅读AHT20数据手册,编程实现:每隔2秒钟采集一次温湿度数据,并通过串口发送到上位机(win10)
2)实战元件:
1.奥松电子所产AHT20,温湿度传感器
2.野火mini开发板
3.电脑
4.杜邦线若干
二.实战过程
1)首先我们可以百度查找AHT20产品手册
我们要了解AHT20的I2C协议参数

2)快速上手
对于初学者来说,要快速掌握AHT20,是比较困难的,所以博主在这里主要介绍快速上手的方法
博主首先到官网下载奥松电子的一个驱动: 例程链接.
如图所示:

这是下载的文件
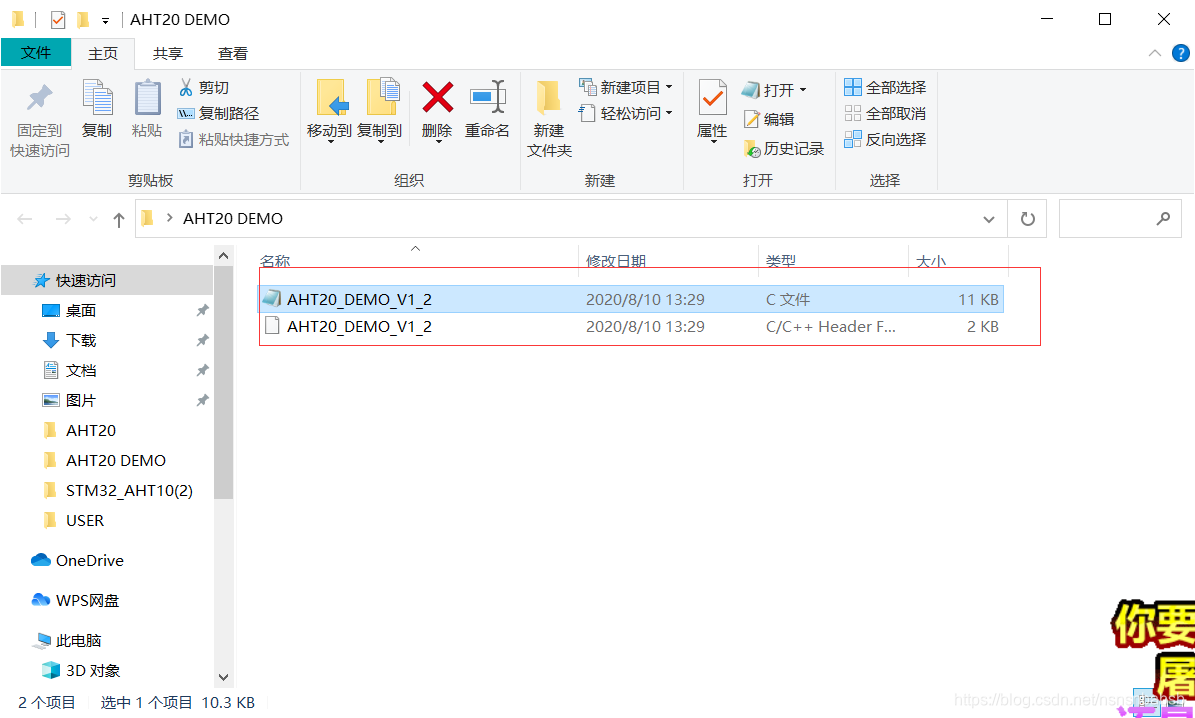
可以改个名
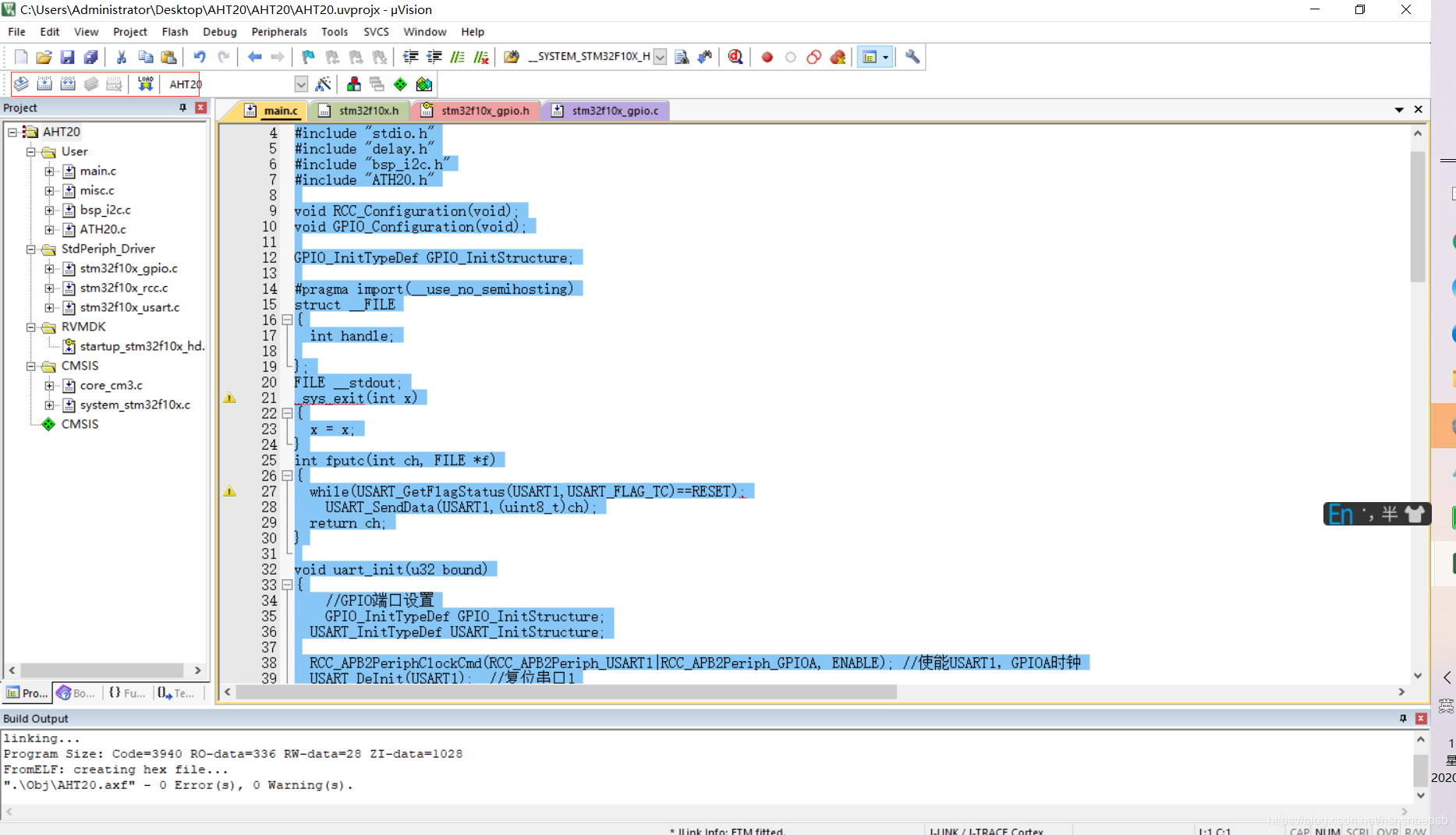
然后博主借用了博主以前用过的一个I2C的工程,快速创建,这里就是通过添加文件来
如需源码请关注博主微信公众号回复:“AHT20”,详见文末
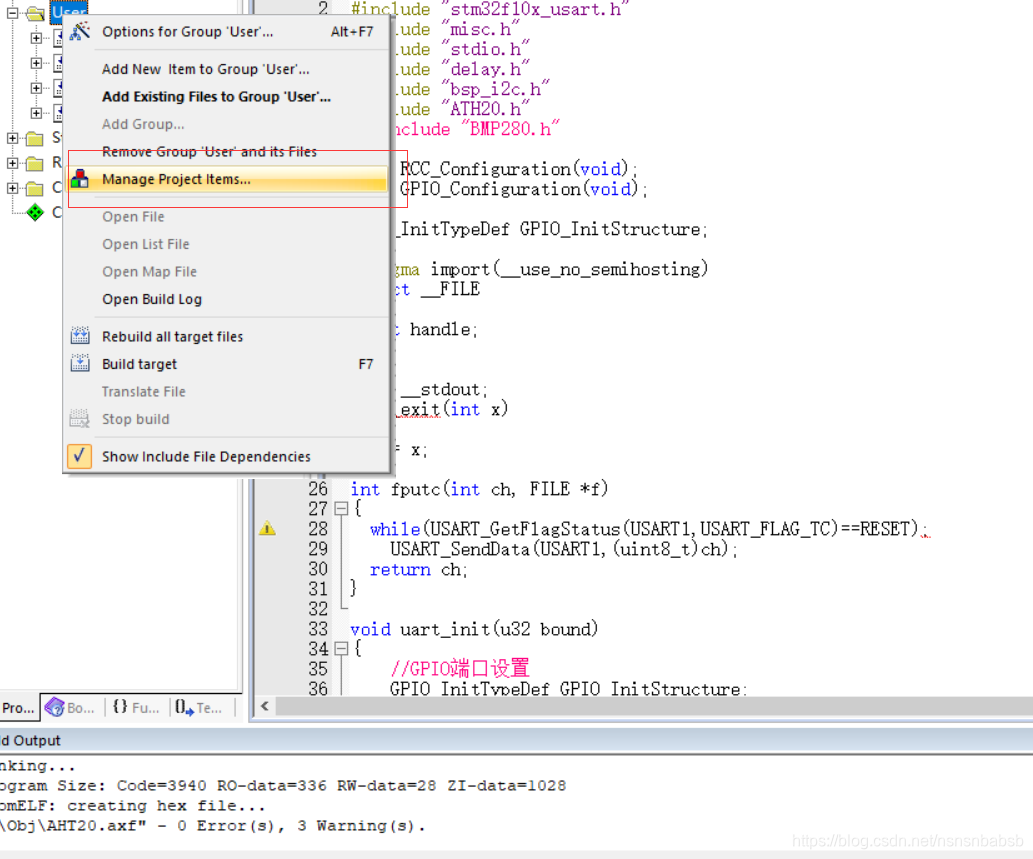
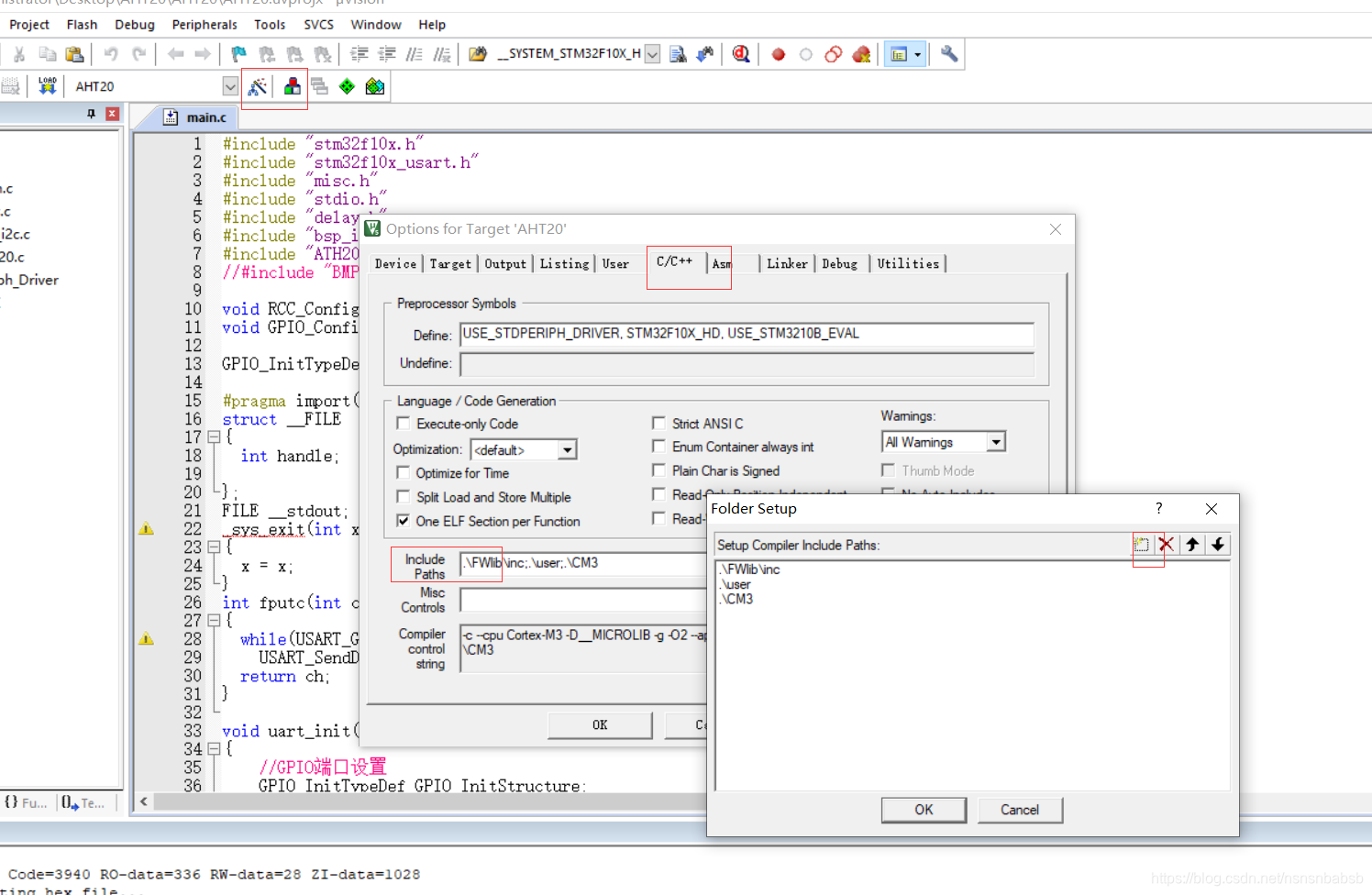
注意要把文件路径添加进去
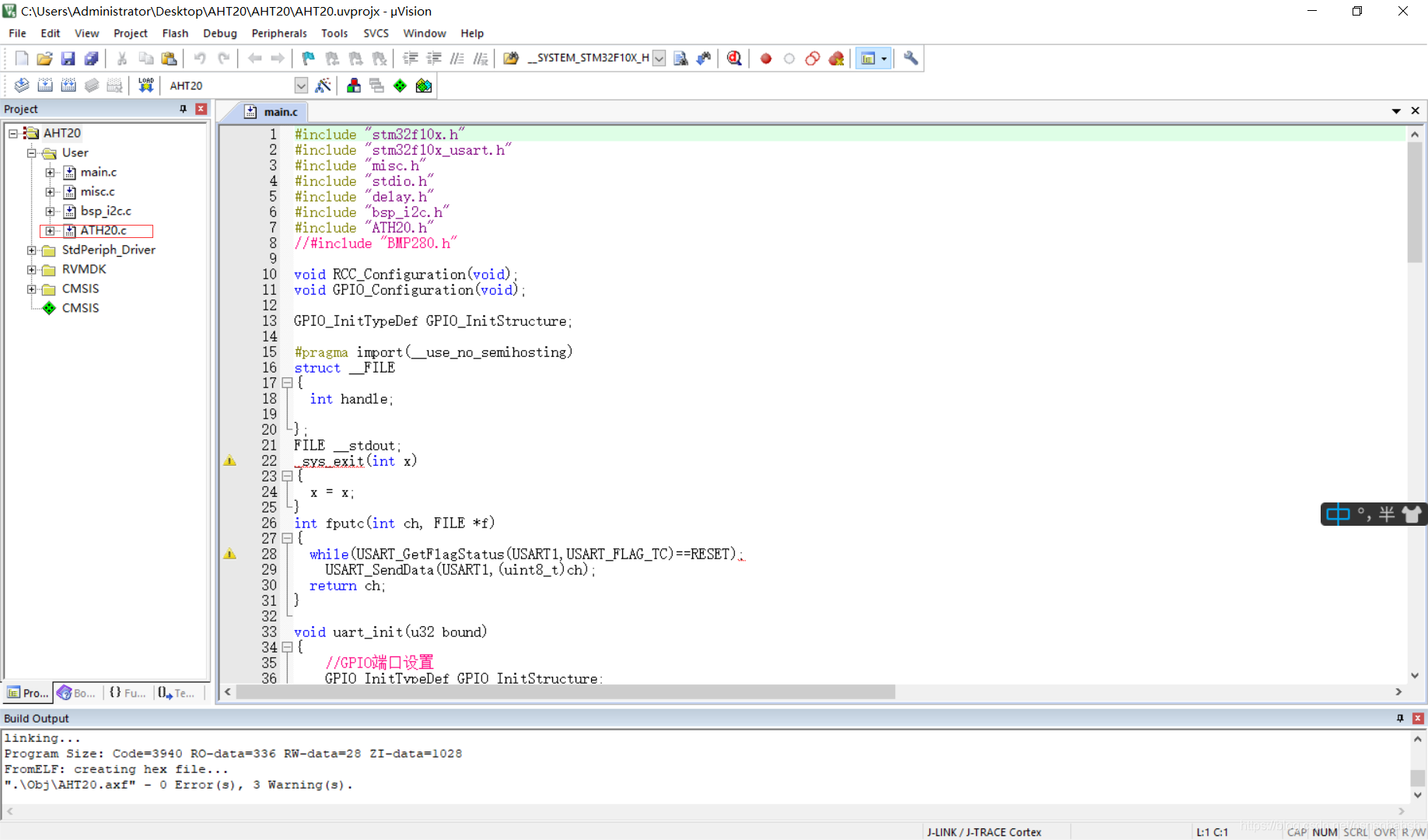
对主函数进行编辑,由于博主的串口没有做独立的定义,所以这里的主函数主要加入了串口初始化,这些其实很多例程里都有的,这里每隔2S读取一次数据,而且采集数据的时候LED也会亮
#include "stm32f10x.h"
#include "stm32f10x_usart.h"
#include "misc.h"
#include "stdio.h"
#include "delay.h"
#include "bsp_i2c.h"
#include "ATH20.h"
void RCC_Configuration(void);
void GPIO_Configuration(void);
GPIO_InitTypeDef GPIO_InitStructure;
#pragma import(__use_no_semihosting)
struct __FILE
{
int handle;
};
FILE __stdout;
_sys_exit(int x)
{
x = x;
}
int fputc(int ch, FILE *f)
{
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)==RESET);
USART_SendData(USART1,(uint8_t)ch);
return ch;
}
void uart_init(u32 bound)
{
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA时钟
USART_DeInit(USART1); //复位串口1
//USART1_TX PA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化PA9
//USART1_RX PA.10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化PA10
//USART 初始化设置
USART_InitStructure.USART_BaudRate = bound;//一般设置为9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口
USART_Cmd(USART1, ENABLE); //使能串口
}
int main(void)
{
uint8_t ret = 0;
float P,T,ALT;
uint32_t CT_data[2];
int c1,t1;
uint8_t LED_Stat = 0;
RCC_Configuration(); //设置系统时钟
GPIO_Configuration(); //IO口设
I2C_Bus_Init();
uart_init(115200);
ret = ATH20_Init();
if(ret == 0)
{
printf("ATH20传感器初始化错误\n");
while(1);
}
while(1)
{
/* 读取 ATH20 传感器数据*/
while(ATH20_Read_Cal_Enable() == 0)
{
ATH20_Init();//如果为0再使能一次
SoftDelay_ms(30);
}
ATH20_Read_CTdata(CT_data); //读取温度和湿度
c1 = CT_data[0] * 1000 / 1024 / 1024; //计算得到湿度值(放大了10倍,如果c1=523,表示现在湿度为52.3%)
t1 = CT_data[1] * 200 *10 / 1024 / 1024 - 500;//计算得到温度值(放大了10倍,如果t1=245,表示现在温度为24.5℃)
printf("***************************\n");
printf("AHT20温湿度传感器测试数据:\n");
printf("温度: %d.%d ℃\n",(t1/10),(t1%10));
printf("湿度: %d.%d %%\n",(c1/10),(c1%10));
printf("\n");
SoftDelay_ms(1000);//每隔两秒读一次数
if(LED_Stat == 0)
{
LED_Stat = 1;
GPIO_ResetBits(GPIOC, GPIO_Pin_2);
}
else
{
LED_Stat = 0;
GPIO_SetBits(GPIOC, GPIO_Pin_2);
}
}
}
void RCC_Configuration(void)
{
SystemInit();
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB | RCC_APB2Periph_GPIOC
| RCC_APB2Periph_GPIOD| RCC_APB2Periph_GPIOE , ENABLE);
}
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2 | GPIO_Pin_4 | GPIO_Pin_5 | GPIO_Pin_7; //状态LED1
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //通用推挽输出模式
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //输出模式最大速度50MHz
GPIO_Init(GPIOC, &GPIO_InitStructure);
}
主函数里串口部分
void uart_init(u32 bound)
{
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA时钟
USART_DeInit(USART1); //复位串口1
//USART1_TX PA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化PA9
//USART1_RX PA.10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化PA10
//USART 初始化设置
USART_InitStructure.USART_BaudRate = bound;//一般设置为9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口
USART_Cmd(USART1, ENABLE); //使能串口
}
三.实战结果
1)烧录
2)演示
博主用的是PB14(SCL)PB15(SDA)
四.总结
这个实战对于我们了解基于在STM32下了解I2C协议开发有着重要的意义,I2C这种协议一种串行总线。具有引脚少,硬件实现简单,可扩展性强的优点。I2C总线的另一优点是支持多主控,总线上任何能够进行发送/接收数据的设备都可以占领总线。当然,任意时间点上只能存在一个主控。所以博主在这里希望各位也要好好学习,争取掌握这个知识点。博主觉得这次开发其实很简单,希望大家在以后的学习中,善于使用我们的工具还有现成的资料。一定会事半功倍,还有就是希望各位有问题可以联系博主,博主很乐意和各位一起学习。请您关注我个人的微信公众号,微信搜索h生活剪影很期待您的关注,我们一起进步。














 1178
1178











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









