






1,I2C协议介绍
I2C介绍可以看这位博主写的,https://blog.csdn.net/cjhz2333/article/details/128000429
这里就不再多说原理
测试准备
做这个实验需要项目模板,野火是有这一类项目模板的,但我没找到,自己搭建了一个,也不是很难,需要的可以去哔哩哔哩搜教程。搭建项目完后,我们需要用到厂商提供的AHT20的代码,这个不知道为什么会有差异,我后面做实验一直失败就是这个AHT20的代码不一样,所以可能需要注意一下,他的编译是不会报错的,但是他的运行是没用的。
然后新建一个group
添加我们需要的串口传输的函数和延时函数
#include "stm32f10x.h" // Serial.c
#include <stdio.h>
#include <stdarg.h>
uint8_t Serial_RxData;
uint8_t Serial_RxFlag;
void Serial_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1, &USART_InitStructure);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
USART_Cmd(USART1, ENABLE);
}
void Serial_SendByte(uint8_t Byte)
{
USART_SendData(USART1, Byte);
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}
void Serial_SendArray(uint32_t *Array, uint16_t Length)
{
uint16_t i;
for (i = 0; i < Length; i ++)
{
Serial_SendByte(Array[i]);
}
}
void Serial_SendString(char *String)
{
uint8_t i;
for (i = 0; String[i] != '\0'; i ++)
{
Serial_SendByte(String[i]);
}
}
uint32_t Serial_Pow(uint32_t X, uint32_t Y)
{
uint32_t Result = 1;
while (Y --)
{
Result *= X;
}
return Result;
}
void Serial_SendNumber(uint32_t Number, uint8_t Length)
{
uint8_t i;
for (i = 0; i < Length; i ++)
{
Serial_SendByte(Number / Serial_Pow(10, Length - i - 1) % 10 + '0');
}
}
int fputc(int ch, FILE *f)
{
Serial_SendByte(ch);
return ch;
}
uint32_t Pow(uint32_t X, uint32_t Y)
{
uint32_t Result = 1;
while (Y--)
{
Result *= X;
}
return Result;
}
void Serial_SendFloat(float Num, uint8_t d_len, uint8_t f_len)
{
uint8_t Len = d_len+f_len;
char arr[Len+2];
uint8_t i,j;
uint32_t temp;
i=0;
if(Num>=0)
{
arr[i]=43;
}else
{
arr[i]=45;
Num=-Num;
}
i++;
temp=(uint32_t)(Num*Pow(10,f_len));
j=0;
while(j<d_len)
{
arr[i]=temp/Pow(10,Len-j-1)%10+'0';
j++;
i++;
}
arr[i] = 46;
i++;
while(j<Len)
{
arr[i]=temp/Pow(10,Len-j-1)%10+'0';
j++;
i++;
}
Serial_SendString(arr);
}
void Serial_Printf(char *format, ...)
{
char String[100];
va_list arg;
va_start(arg, format);
vsprintf(String, format, arg);
va_end(arg);
Serial_SendString(String);
}
uint8_t Serial_GetRxFlag(void)
{
if (Serial_RxFlag == 1)
{
Serial_RxFlag = 0;
return 1;
}
return 0;
}
uint8_t Serial_GetRxData(void)
{
return Serial_RxData;
}
void USART1_IRQHandler(void)
{
if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET)
{
Serial_RxData = USART_ReceiveData(USART1);
Serial_RxFlag = 1;
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
}
#include "stm32f10x.h"
/**
* @brief 微秒级延时
* @param xus 延时时长,范围:0~233015
* @retval 无
*/
void Delay_us(uint32_t xus)
{
SysTick->LOAD = 72 * xus; //设置定时器重装值
SysTick->VAL = 0x00; //清空当前计数值
SysTick->CTRL = 0x00000005; //设置时钟源为HCLK,启动定时器
while(!(SysTick->CTRL & 0x00010000)); //等待计数到0
SysTick->CTRL = 0x00000004; //关闭定时器
}
/**
* @brief 毫秒级延时
* @param xms 延时时长,范围:0~4294967295
* @retval 无
*/
void Delay_ms(uint32_t xms)
{
while(xms--)
{
Delay_us(1000);
}
}
/**
* @brief 秒级延时
* @param xs 延时时长,范围:0~4294967295
* @retval 无
*/
void Delay_s(uint32_t xs)
{
while(xs--)
{
Delay_ms(1000);
}
}
及各自的头文件`
#ifndef __SERIAL_H
#define __SERIAL_H
#include <stdio.h>
void Serial_Init(void);
void Serial_SendByte(uint8_t Byte);
void Serial_SendArray(uint8_t *Array, uint16_t Length);
void Serial_SendString(char *String);
void Serial_SendNumber(uint32_t Number, uint8_t Length);
void Serial_Printf(char *format, ...);
uint8_t Serial_GetRxFlag(void);
uint8_t Serial_GetRxData(void);
#endif
#ifndef __DELAY_H
#define __DELAY_H
void Delay_us(uint32_t us);
void Delay_ms(uint32_t ms);
void Delay_s(uint32_t s);
#endif
然后最后就是这样
如果是自建模板,记得添加项目路径,而且要加一些命令,不然可能会报错

还要勾那个C99,除此之外,keil是不支持ARM compiler 5和6兼容的,所以需要下一个ARM compiler 5,这个也很麻烦,因为官网是不让你单独下的所以需要你去知乎搜一下,上面有解决办法。不下的话,这个写到最后编译也会报错。然后是对AHT20的那个文件进行修改。按下面改



然后因为我们这里是需要检验的·所以把提供的主函数要修改一下,并把给的那一段删掉。
主函数就是如下
#include "stm32f10x.h"
#include "AHT20-21_DEMO_V1_3.h"
#include "Serial.h"
#include "stdio.h"
#include "Delay.h"
int main(void)
{
Serial_Init();//串口
Init_I2C_Sensor_Port();//初始化SDA,SCL的IO口的函数
uint32_t CT_data[2];
volatile int c1,t1;
/***********************************************************************************/
/**///①刚上电,产品芯片内部就绪需要时间,延时100~500ms,建议500ms
/***********************************************************************************/
Delay_1ms(500);
/***********************************************************************************/
/**///②上电第一次发0x71读取状态字,判断状态字是否为0x18,如果不是0x18,进行寄存器初始化
/***********************************************************************************/
if((AHT20_Read_Status()&0x18)!=0x18)
{
AHT20_Start_Init(); //重新初始化寄存器
Delay_1ms(10);
}
/***********************************************************************************/
/**///③根据客户自己需求发测量命令读取温湿度数据,当前while(1)循环发测量命令读取温湿度数据,仅供参考
/***********************************************************************************/
while(1)
{
//AHT20_Read_CTdata(CT_data); //不经过CRC校验,直接读取AHT20的温度和湿度数据 推荐每隔大于1S读一次
AHT20_Read_CTdata_crc(CT_data); //crc校验后,读取AHT20的温度和湿度数据
while(CT_data[0]==0x00&&CT_data[1]==0x00)
{
AHT20_Read_CTdata_crc(CT_data);
}
c1 = CT_data[0]*100*10/1024/1024; //计算得到湿度值c1(放大了10倍)
t1 = CT_data[1]*200*10/1024/1024-500;//计算得到温度值t1(放大了10倍)
下一步客户处理显示数据,我们这里用两个字符串来表示计算得到的值
char str1[5];
char str2[5];
sprintf(str1,"%3.1f",c1/10.0);
sprintf(str2,"%3.1f",t1/10.0);
Delay_1ms(2000);
Serial_SendString("湿度");
Serial_SendString(str1);
Serial_SendString("% ");
Serial_SendString("温度");
Serial_SendString(str2);
Serial_SendString("℃");
Serial_SendString("\r\n");
}
}
然后连线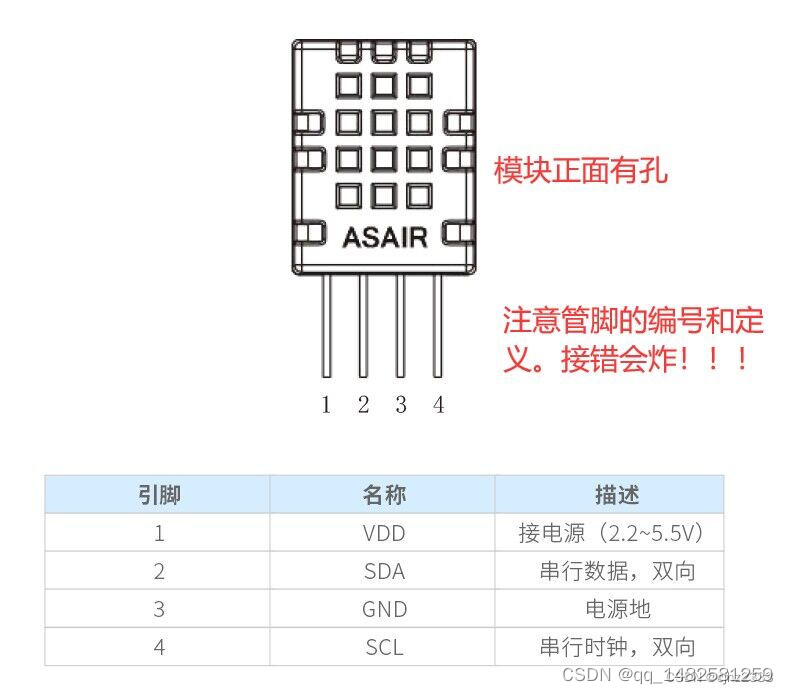
B1接管脚2,B0接管脚4
然后烧录,我这里运行的时候一开始中文是乱码,问了朋友,要把主函数文件用记事本打开后转为ANSI,在编译一次就好了。

总结:学习了自建模板的过程与消除一些错误的方法,了解了AHt20的工作原理与实验测试温湿度传感器。
然后OlED屏显示我也是用IIC协议做的,用的是四针脚。
在上面的工程中添加OLED的文件

然后是用显示屏,先生成字模,按如下设置

并把生成的字模复制粘贴到下面的文件中

然后需要去定义我们的字模,因为原函数是不支持的
/**
* @brief OLED初始化
* @param Line 起始行位置
* @param Column 起始列位置
* @retval 无
*/
void OLED_ShowCHINESE(uint8_t Line, uint8_t Column, uint8_t Num)
{
uint8_t i;
uint8_t wide = 20;//字宽
OLED_SetCursor(( Line - 1 ) * 2, ( Column - 1 )* wide); //参数1:把光标设置在第几页. 参数2:把光标设置在第几列
for (i = 0; i < wide; i++)
{
OLED_WriteData(OLED_F10x16[Num][i]); //显示上半部分内容
}
OLED_SetCursor(( Line - 1 ) * 2 + 1,( Column - 1) * wide);
for (i = 0; i < wide ; i++)
{
OLED_WriteData(OLED_F10x16[Num][i+wide]); //显示下半部分内容
}
}
要实现滚动效果,添加如下代码
OLED_WriteCommand(0x2E); //关闭滚动
OLED_WriteCommand(0x26); //向右滚动,27则向左
OLED_WriteCommand(0x00); //虚拟字节
OLED_WriteCommand(0x00); //起始页 这里为0
OLED_WriteCommand(0x07); //滚动速度
OLED_WriteCommand(0x03); //终止页 这里为3,也就是之后的姓名,学号
OLED_WriteCommand(0x00); //虚拟字节
OLED_WriteCommand(0xFF); //虚拟字节
OLED_WriteCommand(0x2F); //开启滚动
然后是主函数代码
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "AHT20-21_DEMO_V1_3.h"
#include <stdio.h>
int main(void)
{
Init_I2C_Sensor_Port();//初始化SDA,SCL的IO口的函数
uint32_t CT_data[2];
volatile int c1,t1;
Delay_1ms(500);
OLED_Init();//初始化OLED
if((AHT20_Read_Status()&0x18)!=0x18)
{
AHT20_Start_Init(); //重新初始化寄存器
Delay_1ms(10);
}
OLED_ShowCHINESE(1,1,0); //第1行第1列调用字模库第0个字
OLED_ShowCHINESE(1,2,1); //第1行第2列调用字模库第1个字
OLED_ShowString(2,1,"632007060523"); //第二行第一列显示字符串
OLED_ShowCHINESE(3,1,3);//第3行第1列调用字模库第3个字 湿
OLED_ShowCHINESE(3,2,4);//第3行第2列调用字模库第4个字 度
OLED_ShowString(3,6,":");
OLED_ShowCHINESE(4,1,2);//第4行第2列调用字模库第2个字 温
OLED_ShowCHINESE(4,2,4);//第3行第2列调用字模库第4个字 度
OLED_ShowString(4,6,":");
while(1)
{
OLED_WriteCommand(0x2E); //关闭滚动
OLED_WriteCommand(0x26); //向右滚动,27则向左
OLED_WriteCommand(0x00); //虚拟字节
OLED_WriteCommand(0x00); //起始页 这里为0
OLED_WriteCommand(0x07); //滚动速度
OLED_WriteCommand(0x03); //终止页 这里为3,也就是之后的姓名,学号
OLED_WriteCommand(0x00); //虚拟字节
OLED_WriteCommand(0xFF); //虚拟字节
OLED_WriteCommand(0x2F); //开启滚动
//AHT20_Read_CTdata(CT_data);
AHT20_Read_CTdata_crc(CT_data); //CRC校验
while(CT_data[0]==0x00&&CT_data[1]==0x00)
{
AHT20_Read_CTdata_crc(CT_data);//CRC校验后,读取数据
}
c1 = CT_data[0]*100*10/1024/1024;
t1 = CT_data[1]*200*10/1024/1024-500;
下一步客户处理数据,我们这里用两个字符串来表示计算得到的值
char str1[5];
char str2[5];
sprintf(str1,"%.2f",c1/10.0);
sprintf(str2,"%.2f",t1/10.0);
OLED_ShowString(3,7,str1);//把浮点数转为字符串显示在屏上
OLED_ShowString(4,7,str2);
Delay_1ms(2000);
}
}
然后编译运行通过开始烧录,最终效果如下,我这里字模计算有点问题,显示错位了,但我也没搞清楚什么原因,大致能看出来就行。
VID_20221127_002610
总结,了解了AHT20模块工作的原理,以及如和利用IIC协议,如何自建一个模板,还学习了如何插入汉字实现滚动在OLED屏上的方法。















 737
737











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











