







 本文详细介绍了摄像头在自动驾驶中的应用,包括单目、双目和多目摄像头的区别,以及长焦和短焦摄像头的特性。此外,还提到了事件摄像头、全景摄像头、深度摄像头和红外摄像头等新型相机的技术原理和应用场景。摄像头的参数指标如像素、焦距、视场角、帧率和信噪比等也是决定其性能的关键因素。
本文详细介绍了摄像头在自动驾驶中的应用,包括单目、双目和多目摄像头的区别,以及长焦和短焦摄像头的特性。此外,还提到了事件摄像头、全景摄像头、深度摄像头和红外摄像头等新型相机的技术原理和应用场景。摄像头的参数指标如像素、焦距、视场角、帧率和信噪比等也是决定其性能的关键因素。
-
更多内容,请关注:
-
github:Autopilot-Updating-Notes
-
gitee: Autopilot-Updating-Notes
摄像头是目前自动驾驶车中应用和研究最广泛的传感器,其采集图像的过程最接近人类视觉系统。基于图像的物体检测和识别技术已经相当成熟,随着近几年深度学习的发展,基于深度学习的视觉感知算法已大量应用于实际生活和生产中,在某些任务上甚至已经超越人类水平。在自动驾驶车上,一般会安装多个摄像头,兼顾不同的视角和任务。
2.1.1.1 原理
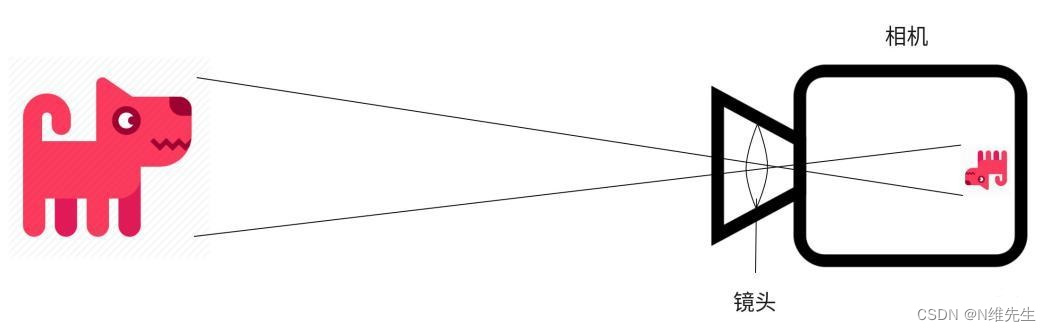
图1. 摄像头
摄像头模组利用透镜成像的原理,光线透过相机镜头后,被感光元器件捕获,通过感光芯片及相关电路来记录和传输图像信号的,如图1所示。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 4435
4435

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









