






逆合成孔径雷达运动补偿,距离多普勒成像,瞬时距离多普勒成像
ID:66110684619437654
黎ISAR不SAR
逆合成孔径雷达(Inverse Synthetic Aperture Radar,简称ISAR)是一种通过合成孔径雷达(Synthetic Aperture Radar,简称SAR)技术,在航天器、舰船或飞机等载体运动的过程中实现高分辨率成像的方法。在ISAR中,通过利用载体的运动,将获得的多个散射数据进行叠加处理,从而达到提高可分辨率的目的。本文将重点介绍ISAR技术中的两个重要方面:运动补偿和距离多普勒成像。
首先,我们来讨论逆合成孔径雷达中的运动补偿问题。由于载体在获得雷达散射数据的过程中会运动,导致接收到的数据中存在运动模糊。为了消除这种模糊,需要对数据进行运动补偿处理。运动补偿的目标是将不同时刻接收到的散射数据配准到同一时刻,从而获得高分辨率的成像结果。常见的运动补偿算法包括基于相位调制的方法、基于多普勒频移的方法以及基于运动参数估计的方法等。文章将详细介绍这些方法的原理与实现,并对它们的适用性和效果进行分析和比较。
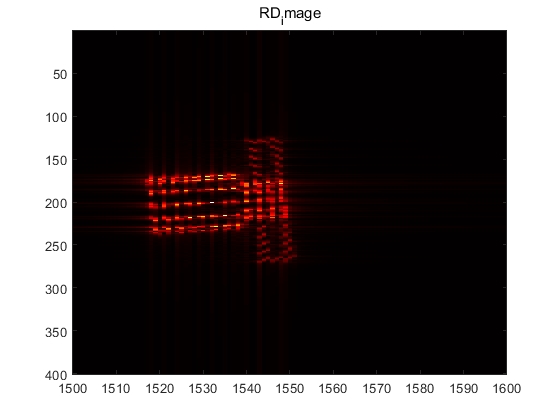
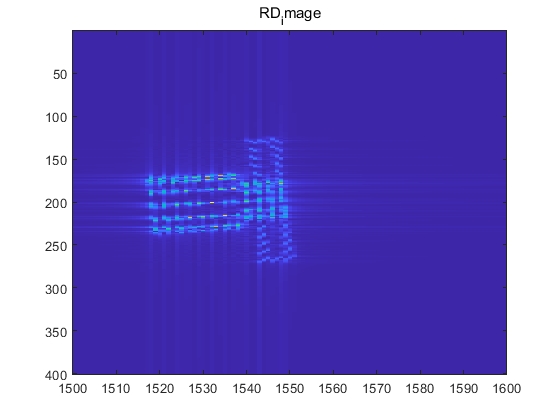
其次,我们将探讨ISAR中的距离多普勒成像问题。距离多普勒成像是ISAR成像的关键环节,它能够反映散射目标的位置和运动状态。在ISAR系统中,载体的运动会引起散射回波信号的多普勒频移,从而影响成像质量。因此,我们需要对多普勒频移进行补偿,以获得准确的成像结果。本文将介绍距离多普勒成像的基本原理,包括多普勒频移的计算方法、多普勒补偿算法的设计原则等。同时,我们还将探讨常见的距离多普勒成像算法,如基于FFT的方法、基于Chirp信号的方法等,并对它们的适用性和性能进行分析。
最后,我们将介绍瞬时距离多普勒成像在ISAR中的应用。瞬时距离多普勒成像是一种通过对瞬时多普勒频移进行处理,实现高分辨率成像的方法。与传统的距离多普勒成像相比,瞬时距离多普勒成像具有更高的分辨率和更强的抗多普勒频移能力。本文将介绍瞬时距离多普勒成像的原理和实现方法,并比较其与传统方法的差异和优势。我们还将讨论瞬时距离多普勒成像在航天器、舰船等领域的应用前景,并展望其未来的发展趋势。
总之,本文围绕逆合成孔径雷达的运动补偿、距离多普勒成像和瞬时距离多普勒成像展开论述。通过对这些关键技术的详细介绍和分析,读者将能够全面了解ISAR技术及其在实际应用中的价值和挑战。同时,本文还会引导读者思考ISAR技术的未来发展方向和可能的研究方向。相信这篇文章能够为读者提供有关逆合成孔径雷达运动补偿、距离多普勒成像和瞬时距离多普勒成像的全面而深入的技术分析,真正做到技术层面的讨论,而非空洞的广告软文。
相关的代码,程序地址如下:http://fansik.cn/684619437654.html


















 1643
1643

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









