






正余弦优化(SCA)算法+任务分配的多智能体路径规划算法。
matlab代码。
显示方式为动态显示。
新型群智能算法。
多智能体路径规划。
动态避障。
1.代码适用于多智能体多目标点的情况。
代码采用匈牙利算法分配智能体的目标点,使得路径总和最小。
2.新型群智能算法。
不同于传统群智能算法只能做全局路径规划,本代码能将群智能算法用于局部路径规划中的动态避障。
相比于那些已经做烂的遗传,蚁群等群智能算法,正余弦优化算法的文章还很少,能动态避障的群智能算法更是少之又少,更不用说在此基础上进一步达成多智能体路径规划
ID:1919762040617923
路径规划
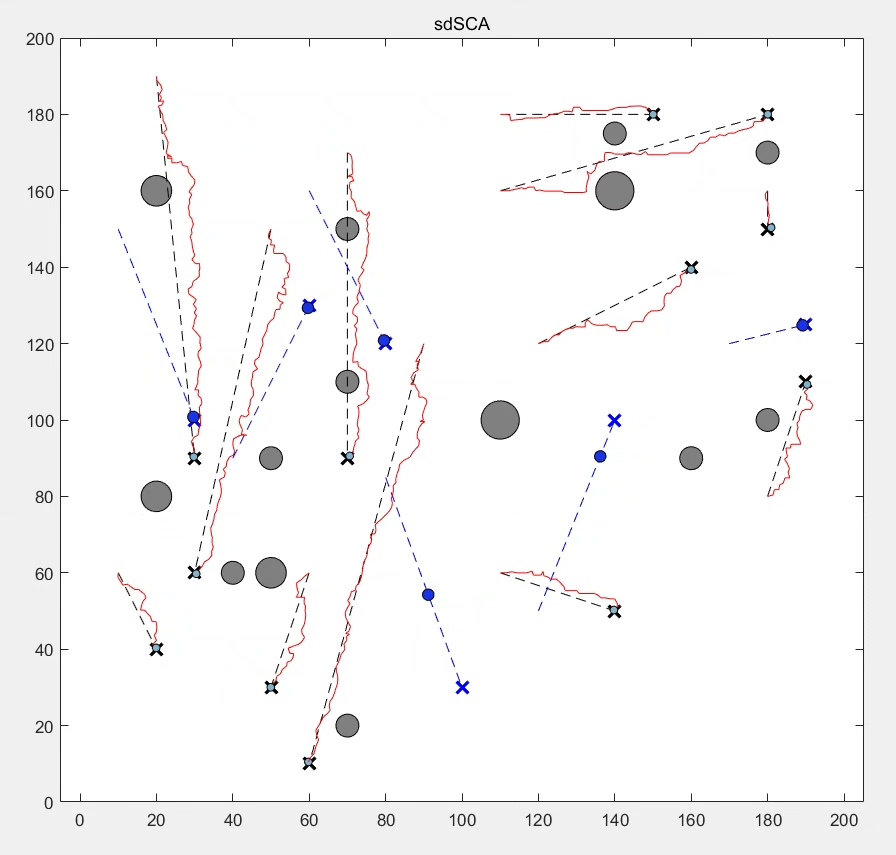
正余弦优化(SCA)算法+任务分配的多智能体路径规划算法
在多智能体路径规划领域,寻求一种高效的群智能算法具有重要的理论和应用价值。本文介绍了一种基于正余弦优化(SCA)算法和任务分配的多智能体路径规划算法。该算法采用matlab代码进行实现,并通过动态显示的方式展示路径规划结果。这种新型群智能算法能够在多智能体系统中实现动态避障,并适用于多目标点的情况。
-
代码适用于多智能体多目标点的情况
本代码设计了针对多智能体多目标点情况的路径规划算法。为了实现最佳路径规划,采用了匈牙利算法来分配智能体的目标点,以确保路径总和最小。通过该算法,智能体能够高效地分配目标点,实现多目标点的路径规划任务。 -
新型群智能算法
与传统的群智能算法只能用于全局路径规划不同,本文提出的算法将群智能算法应用于局部路径规划,并实现了动态避障。相比于已有的遗传算法、蚁群算法等群智能算法,正余弦优化算法在路径规划领域的研究相对较少。而能够实现动态避障的群智能算法更是寥寥无几。本文提出的算法在此基础上进一步实现了多智能体路径规划,填补了该领域的研究空白。
通过对正余弦优化算法的应用,本文在多智能体路径规划中取得了较好的效果。该算法能够高效地分配目标点,实现多目标点的路径规划任务。与传统的群智能算法相比,正余弦优化算法具有更好的局部路径规划能力,并能够动态避障。通过动态显示方式展示路径规划结果,使得该算法的效果更加形象直观。
在未来的研究中,可以进一步优化正余弦优化算法的性能,提高路径规划的效率和准确性。同时,可以探索其他群智能算法在多智能体路径规划领域的应用,进一步丰富该领域的研究成果。通过不断创新和探索,我们有望将多智能体路径规划领域推向一个新的高度,为实现多智能体系统的智能化和自动化做出贡献。
以上相关代码,程序地址:http://fansik.cn/762040617923.html
















 463
463











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









