







1、介绍说明
根据不同的点云场景类型(如 地面、建筑、植物、LiDAR)来自动调节下采样和 DBSCAN 聚类的参数,以达到更智能、更通用的去噪效果。
封装一个函数remove_noise_auto,输入是点云 + 场景类型,输出是自动调参后的干净点云,该函数支持以下功能:
- ✅ 添加点云单位检测(毫米 or 米)
- ✅ 添加自动缩放功能(统一到米制单位)
- ✅ 添加颜色保留逻辑
- ✅ 添加可视化对比脚本(原始 vs 去噪后)

✅ 支持的场景类型:
| 类型 | 描述 | 示例 |
|---|---|---|
'ground' | 地面平坦区域 | 无人驾驶、机器人导航等场景 |
'building' | 建筑物结构 | 城市建模、BIM 等 |
'vegetation' | 植被、树木 | 园林扫描、森林 LiDAR |
'lidar' | 通用 LiDAR 扫描 | 不明确场景时的默认值 |
🧠 参数策略说明
| 参数 | 含义 | 地面 | 建筑 | 植被 | LiDAR(默认) |
|---|---|---|---|---|---|
voxel_size | 下采样粒度 | 0.05~0.1 m | 0.1~0.2 m | 0.05~0.1 m | 0.1 m |
eps | DBSCAN 邻域半径 | 0.3 m | 0.5 m | 0.2 m | 0.3 m |
min_points | 成簇最小点数 | 10 | 20 | 5 | 10 |
min_cluster_size | 最小簇大小 | 50 | 100 | 20 | 50 |
这些参数可以根据点密度、结构复杂程度进行调整。植被点云通常稀疏且不规则,所以参数更保守;建筑/地面结构清晰,可适当放宽。
🧠 为什么需要“单位检测 + 统一缩放”?
点云数据可能来自不同设备(如 LiDAR、RGB-D 相机、SfM 等),其单位可能是:
- 毫米(mm):常见于某些激光雷达或工业扫描仪
- 米(m):常见于 SLAM 或航拍重建
如果不统一单位,可能导致 DBSCAN 参数失效(例如 eps=0.3 在毫米下是 30cm,在米下是 30cm,但如果点云是 mm 单位却按 m 处理,就会误判为噪声)。
2、代码示例
🐼 完整代码
import open3d as o3d
import numpy as np
import matplotlib.pyplot as plt
def detect_pointcloud_unit(points):
"""
根据点云范围判断单位(mm / m)
如果最大坐标值 > 1000,则认为是 mm;否则认为是 m
"""
max_coord = np.max(np.abs(points))
if max_coord > 1000:
print(f"检测到点云单位为 mm(最大坐标: {max_coord:.2f})")
return 'mm'
else:
print(f"检测到点云单位为 m(最大坐标: {max_coord:.2f})")
return 'm'
def convert_to_meters(pcd, unit='mm'):
"""
将点云转换为米制单位
"""
points = np.asarray(pcd.points)
if unit == 'mm':
points = points / 1000.0
pcd.points = o3d.utility.Vector3dVector(points)
return pcd
def remove_noise_auto(pcd, scene_type='lidar'):
"""
根据场景类型自动设置参数并去除噪声,支持单位检测和颜色保留
"""
# Step 0: 检测单位并统一为米
points = np.asarray(pcd.points)
unit = detect_pointcloud_unit(points)
pcd = convert_to_meters(pcd, unit=unit)
# Step 1: 自动调参策略
params = {
'ground': {
'voxel_size': 0.05,
'eps': 0.3,
'min_points': 10,
'min_cluster_size': 50
},
'building': {
'voxel_size': 0.1,
'eps': 0.5,
'min_points': 20,
'min_cluster_size': 100
},
'vegetation': {
'voxel_size': 0.05,
'eps': 0.2,
'min_points': 5,
'min_cluster_size': 20
},
'lidar': {
'voxel_size': 0.1,
'eps': 0.3,
'min_points': 10,
'min_cluster_size': 50
}
}
if scene_type not in params:
print(f"未知场景类型 {scene_type},使用默认参数:lidar")
scene_type = 'lidar'
cfg = params[scene_type]
print(f"使用场景配置: {scene_type}, 参数: {cfg}")
# Step 2: 下采样
downsampled_pcd = pcd.voxel_down_sample(voxel_size=cfg['voxel_size'])
# Step 3: DBSCAN 聚类
labels = np.array(
downsampled_pcd.cluster_dbscan(eps=cfg['eps'], min_points=cfg['min_points'], print_progress=False)
)
# Step 4: 过滤小簇
unique_labels, counts = np.unique(labels, return_counts=True)
valid_clusters = unique_labels[counts >= cfg['min_cluster_size']]
mask = np.isin(labels, valid_clusters)
# Step 5: 提取干净点云
cleaned_points = np.asarray(downsampled_pcd.points)[mask]
# 保留颜色(如果有的话)
if downsampled_pcd.has_colors():
cleaned_colors = np.asarray(downsampled_pcd.colors)[mask]
else:
cleaned_colors = None
cleaned_pcd = o3d.geometry.PointCloud()
cleaned_pcd.points = o3d.utility.Vector3dVector(cleaned_points)
if cleaned_colors is not None:
cleaned_pcd.colors = o3d.utility.Vector3dVector(cleaned_colors)
return cleaned_pcd
def visualize_comparison(original_pcd, cleaned_pcd, window_width=800, window_height=600):
"""
使用 Visualizer 类对比显示点云(可扩展性更强)
"""
def show_pcd(pcd, title):
vis = o3d.visualization.Visualizer()
vis.create_window(window_name=title, width=window_width, height=window_height)
opt = vis.get_render_option()
opt.background_color = [0.1, 0.1, 0.1] # 深灰色背景
opt.point_size = 2.0 # 设置点大小
vis.add_geometry(pcd)
vis.run()
vis.destroy_window()
print("显示原始点云...")
show_pcd(original_pcd, "Original Point Cloud")
print("显示去噪后点云...")
show_pcd(cleaned_pcd, "Cleaned Point Cloud")
# 示例使用
if __name__ == "__main__":
# 加载点云
file_path = "demo.ply"
pcd = o3d.io.read_point_cloud(file_path)
# 将点云数据转化为numpy数组
points = np.asarray(pcd.points)
colors = np.asarray(pcd.colors) # 获取颜色数据
# 筛选Z轴小于设定阈值的点及其对应的颜色
mask = (points[:, 2] > 500) & (points[:, 2] < 3000)
filtered_points = points[mask]
filtered_colors = colors[mask]
# 交换X轴和Y轴的数据
filtered_points[:, [0, 1]] = filtered_points[:, [1, 0]]
# 创建新的点云对象并赋值筛选后的点和颜色
filtered_pcd = o3d.geometry.PointCloud()
filtered_pcd.points = o3d.utility.Vector3dVector(filtered_points)
filtered_pcd.colors = o3d.utility.Vector3dVector(filtered_colors)
pcd = filtered_pcd
# 打印基本信息
print(f"原始点数量: {len(pcd.points)}")
print(f"是否有颜色信息: {pcd.has_colors()}")
# 使用自动去噪函数
cleaned_pcd = remove_noise_auto(pcd, scene_type='vegetation')
print(f"过滤后点数量: {len(cleaned_pcd.points)}")
# 显示前后对比
visualize_comparison(pcd, cleaned_pcd,window_width=800, window_height=500)
# 保存结果(可选)
output_file = "cleaned_pointcloud.ply"
# o3d.io.write_point_cloud(output_file, cleaned_pcd)
# print(f"去噪后点云已保存至: {output_file}")
🚀 运行结果
原始点数量: 203416
是否有颜色信息: True
检测到点云单位为 mm(最大坐标: 2983.00)
使用场景配置: vegetation, 参数: {'voxel_size': 0.05, 'eps': 0.2, 'min_points': 5, 'min_cluster_size': 20}
过滤后点数量: 6491
显示原始点云...
显示去噪后点云...
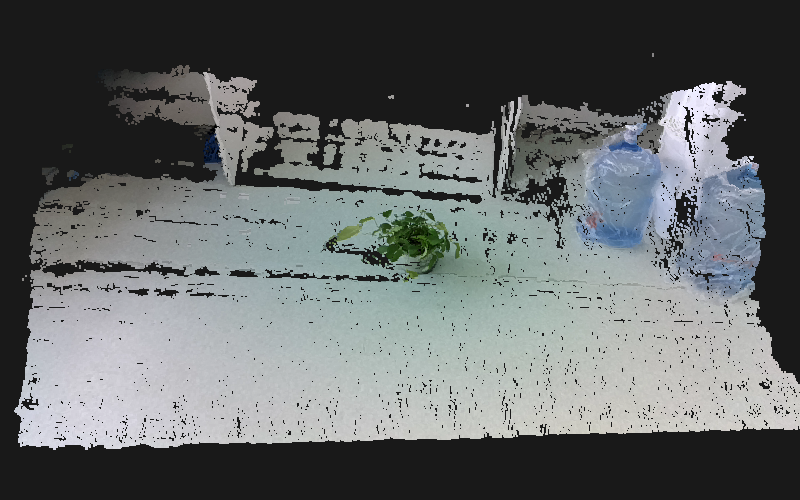
原始点云:
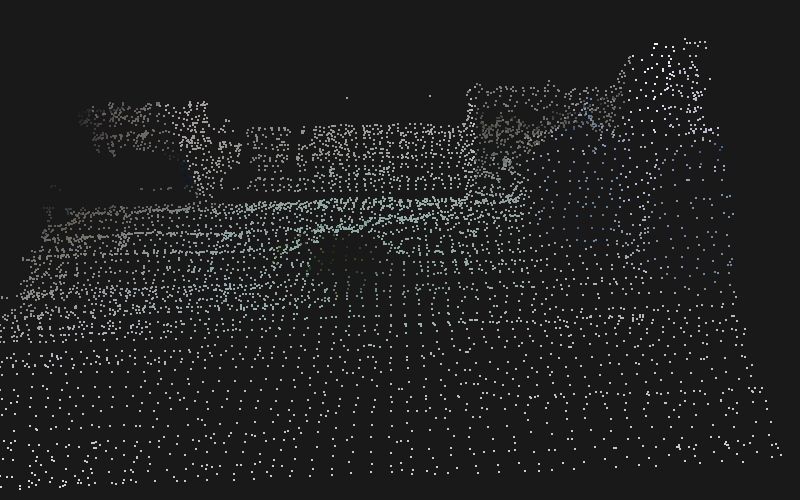
去噪后点云:
📌 总结
这个函数实现了:
- 🧠 场景识别 → 自动调参
- 🧼 点云降噪 → Voxel + DBSCAN
- 📦 输出干净点云 → 保留颜色信息
- ✅ 添加点云单位检测(毫米 or 米)
- ✅ 添加自动缩放功能(统一到米制单位)
- ✅ 添加颜色保留逻辑
- ✅ 添加可视化对比脚本(原始 vs 去噪后)


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









