









时间线

改进点
- 多尺度感受野

Q1. 不同的scale的FeatMap对应的anchor如何设置 ?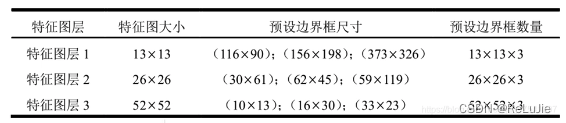
Q2. Yolov2 vs Yolov3
与Yolov2的通过pass-through提取low-res细粒度特征的方式不同,Yolov3显式地借鉴在SSD、RetinaNet等经典方法中采用的特征金字塔方式来cover不同粒度的object,显著地提升了模型对小尺度、密集目标的检出能力。
- 正负样本划分
Positive : 与GT框IOU最大的Anchor[负责预测该object];
Neglect : 与GT框IOU大于阈值,但非最大;
Negative : IOU小于0.5;- 损失函数

Q1. 为什么正类样本P(object)对应的gt值直接设为1而不是iou值呢 ?
Q2. 为什么使用了BCE而不是CE来计算box预测类别的loss呢 ?评测指标
















 14万+
14万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











