






一、YOLOV5输出热力图?
由于GitHub上的YoLo项目一直在更新,导致旧版本添加GradCAM热力图的方式不再使用,为了保证成功输出热力图,在此文进行详细介绍。

二、使用步骤
---修改部分
---model/yolo.py(Detect类中的forward函数)
---添加部分
---model/gradcam.py
---model/yolov5_object_detector.py
---main_gradcam.py
修改yolo代码如下(示例):
修改model/yolo.py文件中的Detect类中的forward函数
添加如下四条语句:
logits_ = []
logits = x[i][..., 5:]
logits_.append(logits.view(bs, -1, self.no - 5))
out = (torch.cat(z, 1), torch.cat(logits_, 1), x)
def forward(self, x):
z = [] # inference output
logits_ = [] # 修改---1
for i in range(self.nl):
x[i] = self.m[i](x[i]) # conv
bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
if not self.training: # inference
if self.dynamic or self.grid[i].shape[2:4] != x[i].shape[2:4]:
self.grid[i], self.anchor_grid[i] = self._make_grid(nx, ny, i)
logits = x[i][..., 5:] # 修改---2
if isinstance(self, Segment): # (boxes + masks)
xy, wh, conf, mask = x[i].split((2, 2, self.nc + 1, self.no - self.nc - 5), 4)
xy = (xy.sigmoid() * 2 + self.grid[i]) * self.stride[i] # xy
wh = (wh.sigmoid() * 2) ** 2 * self.anchor_grid[i] # wh
y = torch.cat((xy, wh, conf.sigmoid(), mask), 4)
else: # Detect (boxes only)
xy, wh, conf = x[i].sigmoid().split((2, 2, self.nc + 1), 4)
xy = (xy * 2 + self.grid[i]) * self.stride[i] # xy
wh = (wh * 2) ** 2 * self.anchor_grid[i] # wh
y = torch.cat((xy, wh, conf), 4)
z.append(y.view(bs, self.na * nx * ny, self.no))
logits_.append(logits.view(bs, -1, self.no - 5)) # 修改---3
# return x if self.training else (torch.cat(z, 1),) if self.export else (torch.cat(logits_, 1), x)
return x if self.training else (torch.cat(z, 1), torch.cat(logits_, 1), x) #修改42.
在models目录下添加gradcam.py文件
代码如下:
import time
import torch
import torch.nn.functional as F
def find_yolo_layer(model, layer_name):
"""Find yolov5 layer to calculate GradCAM and GradCAM++
Args:
model: yolov5 model.
layer_name (str): the name of layer with its hierarchical information.
Return:
target_layer: found layer
"""
hierarchy = layer_name.split('_')
target_layer = model.model._modules[hierarchy[0]]
for h in hierarchy[1:]:
target_layer = target_layer._modules[h]
return target_layer
class YOLOV5GradCAM:
# 初始化,得到target_layer层
def __init__(self, model, layer_name, img_size=(640, 640)):
self.model = model
self.gradients = dict()
self.activations = dict()
def backward_hook(module, grad_input, grad_output):
self.gradients['value'] = grad_output[0]
return None
def forward_hook(module, input, output):
self.activations['value'] = output
return None
target_layer = find_yolo_layer(self.model, layer_name)
# 获取forward过程中每层的输入和输出,用于对比hook是不是正确记录
target_layer.register_forward_hook(forward_hook)
target_layer.register_full_backward_hook(backward_hook)
device = 'cuda' if next(self.model.model.parameters()).is_cuda else 'cpu'
self.model(torch.zeros(1, 3, *img_size, device=device))
def forward(self, input_img, class_idx=True):
"""
Args:
input_img: input image with shape of (1, 3, H, W)
Return:
mask: saliency map of the same spatial dimension with input
logit: model output
preds: The object predictions
"""
saliency_maps = []
b, c, h, w = input_img.size()
preds, logits = self.model(input_img)
for logit, cls, cls_name in zip(logits[0], preds[1][0], preds[2][0]):
if class_idx:
score = logit[cls]
else:
score = logit.max()
self.model.zero_grad()
tic = time.time()
# 获取梯度
score.backward(retain_graph=True)
print(f"[INFO] {cls_name}, model-backward took: ", round(time.time() - tic, 4), 'seconds')
gradients = self.gradients['value']
activations = self.activations['value']
b, k, u, v = gradients.size()
alpha = gradients.view(b, k, -1).mean(2)
weights = alpha.view(b, k, 1, 1)
for i in range(4):
weights=torch.cat((weights,weights),1)
i +=1
saliency_map = (weights * activations).sum(1, keepdim=True)
saliency_map = F.relu(saliency_map)
saliency_map = F.interpolate(saliency_map, size=(h, w), mode='bilinear', align_corners=False)
saliency_map_min, saliency_map_max = saliency_map.min(), saliency_map.max()
saliency_map = (saliency_map - saliency_map_min).div(saliency_map_max - saliency_map_min).data
saliency_maps.append(saliency_map)
return saliency_maps, logits, preds
def __call__(self, input_img):
return self.forward(input_img)
class YOLOV5GradCAMPP(YOLOV5GradCAM):
def __init__(self, model, layer_name, img_size=(640, 640)):
super(YOLOV5GradCAMPP, self).__init__(model, layer_name, img_size)
def forward(self, input_img, class_idx=True):
saliency_maps = []
b, c, h, w = input_img.size()
tic = time.time()
preds, logits = self.model(input_img)
print("[INFO] model-forward took: ", round(time.time() - tic, 4), 'seconds')
for logit, cls, cls_name in zip(logits[0], preds[1][0], preds[2][0]):
if class_idx:
score = logit[cls]
else:
score = logit.max()
self.model.zero_grad()
tic = time.time()
# 获取梯度
score.backward(retain_graph=True)
print(f"[INFO] {cls_name}, model-backward took: ", round(time.time() - tic, 4), 'seconds')
gradients = self.gradients['value'] # dS/dA
activations = self.activations['value'] # A
b, k, u, v = gradients.size()
alpha_num = gradients.pow(2)
alpha_denom = gradients.pow(2).mul(2) + \
activations.mul(gradients.pow(3)).view(b, k, u * v).sum(-1, keepdim=True).view(b, k, 1, 1)
# torch.where(condition, x, y) condition是条件,满足条件就返回x,不满足就返回y
alpha_denom = torch.where(alpha_denom != 0.0, alpha_denom, torch.ones_like(alpha_denom))
alpha = alpha_num.div(alpha_denom + 1e-7)
positive_gradients = F.relu(score.exp() * gradients) # ReLU(dY/dA) == ReLU(exp(S)*dS/dA))
weights = (alpha * positive_gradients).view(b, k, u * v).sum(-1).view(b, k, 1, 1)
saliency_map = (weights * activations).sum(1, keepdim=True)
saliency_map = F.relu(saliency_map)
saliency_map = F.interpolate(saliency_map, size=(h, w), mode='bilinear', align_corners=False)
saliency_map_min, saliency_map_max = saliency_map.min(), saliency_map.max()
saliency_map = (saliency_map - saliency_map_min).div(saliency_map_max - saliency_map_min).data
saliency_maps.append(saliency_map)
return saliency_maps, logits, preds
3:添加yolo_v5_object_detector.py文件
具体代码如下:
import numpy as np
import torch
from models.experimental import attempt_load
from utils.general import xywh2xyxy
from utils.dataloaders import letterbox
import cv2
import time
import torchvision
import torch.nn as nn
from utils.metrics import box_iou
class YOLOV5TorchObjectDetector(nn.Module):
def __init__(self,
model_weight,
device,
img_size,
names=None,
mode='eval',
confidence=0.45,
iou_thresh=0.45,
agnostic_nms=False):
super(YOLOV5TorchObjectDetector, self).__init__()
self.device = device
self.model = None
self.img_size = img_size
self.mode = mode
self.confidence = confidence
self.iou_thresh = iou_thresh
self.agnostic = agnostic_nms
self.model = attempt_load(model_weight, device=device, inplace=False, fuse=False)
self.model.requires_grad_(True)
self.model.to(device)
if self.mode == 'train':
self.model.train()
else:
self.model.eval()
# fetch the names
if names is None:
self.names = ['your dataset classname']
else:
self.names = names
# preventing cold start
img = torch.zeros((1, 3, *self.img_size), device=device)
self.model(img)
@staticmethod
def non_max_suppression(prediction, logits, conf_thres=0.3, iou_thres=0.45, classes=None, agnostic=False,
multi_label=False, labels=(), max_det=300):
"""Runs Non-Maximum Suppression (NMS) on inference and logits results
Returns:
list of detections, on (n,6) tensor per image [xyxy, conf, cls] and pruned input logits (n, number-classes)
"""
nc = prediction.shape[2] - 5 # number of classes
xc = prediction[..., 4] > conf_thres # candidates
# Checks
assert 0 <= conf_thres <= 1, f'Invalid Confidence threshold {conf_thres}, valid values are between 0.0 and 1.0'
assert 0 <= iou_thres <= 1, f'Invalid IoU {iou_thres}, valid values are between 0.0 and 1.0'
# Settings
min_wh, max_wh = 2, 4096 # (pixels) minimum and maximum box width and height
max_nms = 30000 # maximum number of boxes into torchvision.ops.nms()
time_limit = 10.0 # seconds to quit after
redundant = True # require redundant detections
multi_label &= nc > 1 # multiple labels per box (adds 0.5ms/img)
merge = False # use merge-NMS
t = time.time()
output = [torch.zeros((0, 6), device=prediction.device)] * prediction.shape[0]
logits_output = [torch.zeros((0, nc), device=logits.device)] * logits.shape[0]
# logits_output = [torch.zeros((0, 80), device=logits.device)] * logits.shape[0]
for xi, (x, log_) in enumerate(zip(prediction, logits)): # image index, image inference
# Apply constraints
# x[((x[..., 2:4] < min_wh) | (x[..., 2:4] > max_wh)).any(1), 4] = 0 # width-height
x = x[xc[xi]] # confidence
log_ = log_[xc[xi]]
# Cat apriori labels if autolabelling
if labels and len(labels[xi]):
l = labels[xi]
v = torch.zeros((len(l), nc + 5), device=x.device)
v[:, :4] = l[:, 1:5] # box
v[:, 4] = 1.0 # conf
v[range(len(l)), l[:, 0].long() + 5] = 1.0 # cls
x = torch.cat((x, v), 0)
# If none remain process next image
if not x.shape[0]:
continue
# Compute conf
x[:, 5:] *= x[:, 4:5] # conf = obj_conf * cls_conf
# Box (center x, center y, width, height) to (x1, y1, x2, y2)
box = xywh2xyxy(x[:, :4])
# Detections matrix nx6 (xyxy, conf, cls)
if multi_label:
i, j = (x[:, 5:] > conf_thres).nonzero(as_tuple=False).T
x = torch.cat((box[i], x[i, j + 5, None], j[:, None].float()), 1)
else: # best class only
conf, j = x[:, 5:].max(1, keepdim=True)
x = torch.cat((box, conf, j.float()), 1)[conf.view(-1) > conf_thres]
log_ = log_[conf.view(-1) > conf_thres]
# Filter by class
if classes is not None:
x = x[(x[:, 5:6] == torch.tensor(classes, device=x.device)).any(1)]
# Check shape
n = x.shape[0] # number of boxes
if not n: # no boxes
continue
elif n > max_nms: # excess boxes
x = x[x[:, 4].argsort(descending=True)[:max_nms]] # sort by confidence
# Batched NMS
c = x[:, 5:6] * (0 if agnostic else max_wh) # classes
boxes, scores = x[:, :4] + c, x[:, 4] # boxes (offset by class), scores
i = torchvision.ops.nms(boxes, scores, iou_thres) # NMS
if i.shape[0] > max_det: # limit detections
i = i[:max_det]
if merge and (1 < n < 3E3): # Merge NMS (boxes merged using weighted mean)
# update boxes as boxes(i,4) = weights(i,n) * boxes(n,4)
iou = box_iou(boxes[i], boxes) > iou_thres # iou matrix
weights = iou * scores[None] # box weights
x[i, :4] = torch.mm(weights, x[:, :4]).float() / weights.sum(1, keepdim=True) # merged boxes
if redundant:
i = i[iou.sum(1) > 1] # require redundancy
output[xi] = x[i]
logits_output[xi] = log_[i]
assert log_[i].shape[0] == x[i].shape[0]
if (time.time() - t) > time_limit:
print(f'WARNING: NMS time limit {time_limit}s exceeded')
break # time limit exceeded
return output, logits_output
@staticmethod
def yolo_resize(img, new_shape=(640, 640), color=(114, 114, 114), auto=True, scaleFill=False, scaleup=True):
return letterbox(img, new_shape=new_shape, color=color, auto=auto, scaleFill=scaleFill, scaleup=scaleup)
def forward(self, img):
prediction, logits, _ = self.model(img, augment=False)
prediction, logits = self.non_max_suppression(prediction, logits, self.confidence, self.iou_thresh,
classes=None,
agnostic=self.agnostic)
self.boxes, self.class_names, self.classes, self.confidences = [[[] for _ in range(img.shape[0])] for _ in
range(4)]
for i, det in enumerate(prediction): # detections per image
if len(det):
for *xyxy, conf, cls in det:
# 返回整数
bbox = [int(b) for b in xyxy]
self.boxes[i].append(bbox)
self.confidences[i].append(round(conf.item(), 2))
cls = int(cls.item())
self.classes[i].append(cls)
if self.names is not None:
self.class_names[i].append(self.names[cls])
else:
self.class_names[i].append(cls)
return [self.boxes, self.classes, self.class_names, self.confidences], logits
def preprocessing(self, img):
if len(img.shape) != 4:
img = np.expand_dims(img, axis=0)
im0 = img.astype(np.uint8)
img = np.array([self.yolo_resize(im, new_shape=self.img_size)[0] for im in im0])
img = img.transpose((0, 3, 1, 2))
img = np.ascontiguousarray(img)
img = torch.from_numpy(img).to(self.device)
img = img / 255.0
return img
4:添加主程序
具体代码如下:
import os
import random
import time
import argparse
import numpy as np
from models.gradcam import YOLOV5GradCAM, YOLOV5GradCAMPP
from models.yolo_v5_object_detector import YOLOV5TorchObjectDetector
import cv2
# 数据集类别名
names = ["0","1"] # class names
# yolov5s网络中的三个detect层
# target_layers = ['model_18_cv3_act', 'model_21_cv3_act', 'model_24_cv3_act']
target_layers = ['model_18_cv3_act', 'model_21_cv3_act', 'model_24_cv3_act']
# Arguments
parser = argparse.ArgumentParser()
parser.add_argument('--model-path', type=str, default="D:/yolov5-master/yolov5-master/runs/train/exp31/weights/best.pt", help='Path to the model')
parser.add_argument('--img-path', type=str, default='D:/yolov5-master/yolov5-master/mydata2/images/test/Pic28.jpg', help='input image path')
parser.add_argument('--output-dir', type=str, default='./gracam/31outputs/', help='output dir')
parser.add_argument('--img-size', type=int, default=640, help="input image size")
parser.add_argument('--target-layer', type=str, default='model_17_cv3_act',
help='The layer hierarchical address to which gradcam will applied,'
' the names should be separated by underline')
parser.add_argument('--method', type=str, default='gradcam', help='gradcam method')
parser.add_argument('--device', type=str, default='cpu', help='cuda or cpu')
parser.add_argument('--no_text_box', action='store_true',
help='do not show label and box on the heatmap')
args = parser.parse_args()
def get_res_img(bbox, mask, res_img):
mask = mask.squeeze(0).mul(255).add_(0.5).clamp_(0, 255).permute(1, 2, 0).detach().cpu().numpy().astype(
np.uint8)
heatmap = cv2.applyColorMap(mask, cv2.COLORMAP_JET)
# n_heatmat = (Box.fill_outer_box(heatmap, bbox) / 255).astype(np.float32)
n_heatmat = (heatmap / 255).astype(np.float32)
res_img = res_img / 255
res_img = cv2.add(res_img, n_heatmat)
res_img = (res_img / res_img.max())
return res_img, n_heatmat
def plot_one_box(x, img, color=None, label=None, line_thickness=3):
# this is a bug in cv2. It does not put box on a converted image from torch unless it's buffered and read again!
cv2.imwrite('temp.jpg', (img * 255).astype(np.uint8))
img = cv2.imread('temp.jpg')
# Plots one bounding box on image img
tl = line_thickness or round(0.002 * (img.shape[0] + img.shape[1]) / 2) + 1 # line/font thickness
color = color or [random.randint(0, 255) for _ in range(3)]
c1, c2 = (int(x[0]), int(x[1])), (int(x[2]), int(x[3]))
cv2.rectangle(img, c1, c2, color, thickness=tl, lineType=cv2.LINE_AA)
if label:
tf = max(tl - 1, 1) # font thickness
t_size = cv2.getTextSize(label, 0, fontScale=tl / 3, thickness=tf)[0]
outside = c1[1] - t_size[1] - 3 >= 0 # label fits outside box up
c2 = c1[0] + t_size[0], c1[1] - t_size[1] - 3 if outside else c1[1] + t_size[1] + 3
outsize_right = c2[0] - img.shape[:2][1] > 0 # label fits outside box right
c1 = c1[0] - (c2[0] - img.shape[:2][1]) if outsize_right else c1[0], c1[1]
c2 = c2[0] - (c2[0] - img.shape[:2][1]) if outsize_right else c2[0], c2[1]
cv2.rectangle(img, c1, c2, color, -1, cv2.LINE_AA) # filled
cv2.putText(img, label, (c1[0], c1[1] - 2 if outside else c2[1] - 2), 0, tl / 3, [225, 255, 255], thickness=tf,
lineType=cv2.LINE_AA)
return img
# 检测单个图片
def main(img_path):
colors = [[random.randint(0, 255) for _ in range(3)] for _ in names]
device = args.device
input_size = (args.img_size, args.img_size)
# 读入图片
img = cv2.imread(img_path) # 读取图像格式:BGR
print('[INFO] Loading the model')
# 实例化YOLOv5模型,得到检测结果
model = YOLOV5TorchObjectDetector(args.model_path, device, img_size=input_size, names=names)
# img[..., ::-1]: BGR --> RGB
# (480, 640, 3) --> (1, 3, 480, 640)
torch_img = model.preprocessing(img[..., ::-1])
tic = time.time()
# 遍历三层检测层
for target_layer in target_layers:
# 获取grad-cam方法
if args.method == 'gradcam':
saliency_method = YOLOV5GradCAM(model=model, layer_name=target_layer, img_size=input_size)
elif args.method == 'gradcampp':
saliency_method = YOLOV5GradCAMPP(model=model, layer_name=target_layer, img_size=input_size)
masks, logits, [boxes, _, class_names, conf] = saliency_method(torch_img) # 得到预测结果
result = torch_img.squeeze(0).mul(255).add_(0.5).clamp_(0, 255).permute(1, 2, 0).detach().cpu().numpy()
result = result[..., ::-1] # convert to bgr
# 保存设置
imgae_name = os.path.basename(img_path) # 获取图片名
save_path = f'{args.output_dir}{imgae_name[:-4]}/{args.method}'
if not os.path.exists(save_path):
os.makedirs(save_path)
print(f'[INFO] Saving the final image at {save_path}')
# 遍历每张图片中的每个目标
for i, mask in enumerate(masks):
# 遍历图片中的每个目标
res_img = result.copy()
# 获取目标的位置和类别信息
bbox, cls_name = boxes[0][i], class_names[0][i]
label = f'{cls_name} {conf[0][i]}' # 类别+置信分数
# 获取目标的热力图
res_img, heat_map = get_res_img(bbox, mask, res_img)
res_img = plot_one_box(bbox, res_img, label=label, color=colors[int(names.index(cls_name))],
line_thickness=3)
# 缩放到原图片大小
res_img = cv2.resize(res_img, dsize=(img.shape[:-1][::-1]))
output_path = f'{save_path}/{target_layer[6:8]}_{i}.jpg'
cv2.imwrite(output_path, res_img)
print(f'{target_layer[6:8]}_{i}.jpg done!!')
print(f'Total time : {round(time.time() - tic, 4)} s')
if __name__ == '__main__':
# 图片路径为文件夹
if os.path.isdir(args.img_path):
img_list = os.listdir(args.img_path)
print(img_list)
for item in img_list:
# 依次获取文件夹中的图片名,组合成图片的路径
main(os.path.join(args.img_path, item))
# 单个图片
else:
main(args.img_path)
注:1:names要与自己的数据集匹配。
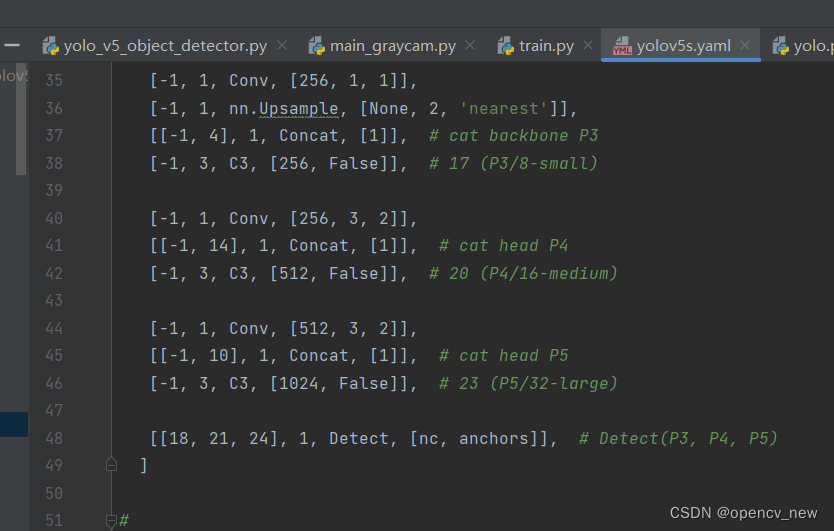
注:2:target_layers要与自己的yaml匹配,up主的分别是18 21 24。对应下图的yaml文件
注意:如果不能成功运行报下列错误:
saliency_map = (weights * activations).sum(1, keepdim=True) RuntimeError: The size of tensor a (32) must match the size of tensor b (512) at non-singleton dimension 1
需要对gradcam文件进行如下修改:大概在73行

总结
例如:以上就是今天要讲的内容,本文介绍了最新的yolov5项目如何输出热力图,并详细介绍了整个处理流程,需要对大家有用。















 3722
3722

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









