// -----------------------------------------------------------------------------
// Copyright (c) 2014-2025 All rights reserved
// -----------------------------------------------------------------------------
// Author : lvjitao lvjitao_o@163.com
// File : adc_ctrl_ads1256.v
// Create : 2025-10-18 09:06:14
// Revise : 2025-10-21 19:50:17
// Editor : sublime text3, tab size (4)
// -----------------------------------------------------------------------------
`timescale 1ns/1ps
module adc_ctrl_ads1256(
//uart
input wire clk,
input wire rst_n,
input wire [7:0] pi_data_rx,
input wire pi_flag_rx,
output wire [7:0] po_data_tx,
output wire po_flag_tx,
//1256 spi interface\
input wire miso,
output wire cs_n,
output reg sclk,
output wire mosi,
//1256 ads1256 signal\
input wire drdy, //adctive low
output reg reset, //adctive low
output wire sync //adctive low
);
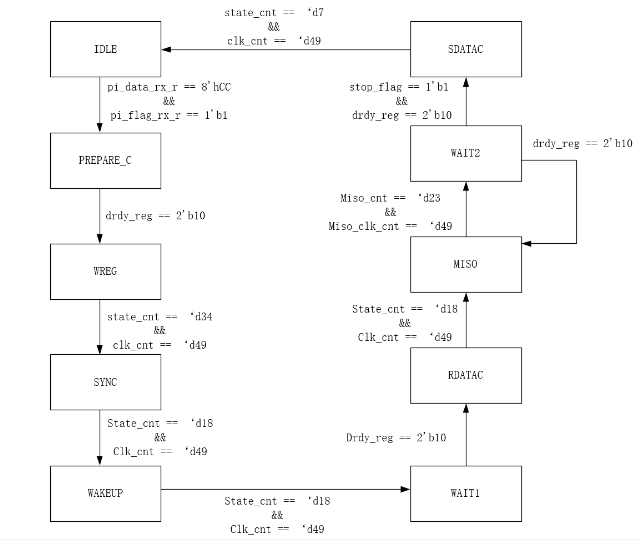
localparam IDLE = 10'b0000000001;
localparam PREPARE_C = 10'b0000000010;
localparam WREG = 10'b0000000100;
localparam SYNC_S = 10'b0000001000;
localparam WAKEUP = 10'b0000010000;
localparam WAIT1 = 10'b0000100000;
localparam RDATAC = 10'b0001000000;
localparam MISO_S = 10'b0010000000;
localparam WAIT2 = 10'b0100000000;
localparam SDATAC = 10'b1000000000;
localparam RESET_MAX = 500 - 1;
localparam CLK_CNT_MAX = 50 - 1;
localparam STATE_CNT_MAX = 34;
localparam SY_WA_RD_STATE_CNT_MAX = 18;
//cmd
localparam CMD_WREG = 24'h510078;
localparam CMD_SYNC = 8'hFC;
localparam CMD_WAKEUP = 8'hFF;
localparam CMD_RDATAC = 8'h03;
localparam CMD_SDATAC = 8'h0F;
reg [9:0] state;
reg [1:0] drdy_reg = 0;
reg [8:0] reset_adc_cnt;
reg [5:0] clk_cnt;
reg [5:0] state_cnt;
reg [56:0] shift_reg;
//delet
reg mosi_wreg;
reg mosi_sync;
reg mosi_wakeup;
reg mosi_rdatac;
assign cs_n = 1'b0;
assign sync = 1'b1;
always @(posedge clk ) begin
if (rst_n == 1'b0) begin
// reset
reset_adc_cnt <= 'd0;
end
else if (reset_adc_cnt != RESET_MAX) begin
reset_adc_cnt <= reset_adc_cnt + 1'b1;
end
end
always @(posedge clk ) begin
if (rst_n == 1'b0) begin
// reset
reset <= 1'b0;
end
else if (reset_adc_cnt == RESET_MAX) begin
reset <= 1;
end
end
always @(posedge clk ) begin
if (rst_n == 1'b0) begin
// reset
state <= 'd0;
end
else case (state)
IDLE: begin
if (pi_flag_rx == 1'b1 && pi_data_rx == 8'hcc) begin
state <= PREPARE_C;
end
else begin
state <= IDLE;
end
end
PREPARE_C: begin
if (drdy_reg == 2'b10) begin
state <= WREG;
end
else begin
state <= PREPARE_C;
end
end
WREG: begin
if (state_cnt == STATE_CNT_MAX && clk_cnt == CLK_CNT_MAX) begin
state <= SYNC_S;
end
end
SYNC_S: begin
if (state_cnt == SY_WA_RD_STATE_CNT_MAX && clk_cnt == CLK_CNT_MAX) begin
state <= WAKEUP;
end
end
WAKEUP: begin
if (state_cnt == SY_WA_RD_STATE_CNT_MAX && clk_cnt == CLK_CNT_MAX) begin
state <= WAIT1;
end
end
WAIT1: begin
if (drdy_reg == 2'b10) begin
state <= RDATAC;
end
end
RDATAC: begin
if (state_cnt == SY_WA_RD_STATE_CNT_MAX && clk_cnt == CLK_CNT_MAX) begin
state <= MISO_S;
end
end
default: state <= IDLE;
endcase
end
always @(posedge clk ) begin
drdy_reg <= {drdy_reg[0], drdy};
end
always @(posedge clk ) begin
if (rst_n == 1'b0) begin
// reset
clk_cnt <= 0;
end
else if (state == WREG || state == SYNC_S || state == WAKEUP || state == RDATAC) begin
if (clk_cnt == CLK_CNT_MAX) begin
clk_cnt <= 0;
end
else begin
clk_cnt <= clk_cnt + 1'b1;
end
end
end
always @(posedge clk ) begin
if (rst_n == 'b0) begin
// reset
state_cnt <= 'd0;
end
else if (state == WREG ) begin
if (state_cnt ==STATE_CNT_MAX && clk_cnt == CLK_CNT_MAX) begin
state_cnt <= 'd0;
end
else if(clk_cnt == CLK_CNT_MAX) begin
state_cnt <= state_cnt + 1'd1;
end
end
else if (state == SYNC_S || state == WAKEUP || state == RDATAC) begin
if (state_cnt ==SY_WA_RD_STATE_CNT_MAX && clk_cnt == CLK_CNT_MAX) begin
state_cnt <= 'b0;
end
else if(clk_cnt == CLK_CNT_MAX) begin
state_cnt <= state_cnt + 1'd1;
end
end
else begin
state_cnt <= 'b0;
end
end
always @(posedge clk ) begin
if (rst_n == 0) begin
// reset
sclk <= 0;
end
else if ((state == WREG && state_cnt <= 'd23) || ((state == SYNC_S || state == WAKEUP || state == RDATAC) && state_cnt <= 'd8)) begin
if (clk_cnt == CLK_CNT_MAX[6:1]) begin
sclk <= 1'b1;
end
else if (clk_cnt == CLK_CNT_MAX) begin
sclk <= 1'b0;
end
end
else begin
sclk <= 0;
end
end
always @(posedge clk ) begin
if (rst_n == 0) begin
// reset
shift_reg <= {CMD_WREG, CMD_SYNC, CMD_WAKEUP, CMD_RDATAC, CMD_SDATAC};
end
else if (state ==IDLE) begin
shift_reg <= {CMD_WREG, CMD_SYNC,CMD_WAKEUP, CMD_RDATAC, CMD_SDATAC};
end
else if ((state == WREG && state_cnt >= 1'd1 &&state_cnt <= 'd24) || ((state == SYNC_S || state == WAKEUP || state == RDATAC) && state_cnt >= 1'd1 &&state_cnt <= 'd8)) begin
if (clk_cnt == CLK_CNT_MAX[6:1]) begin
shift_reg <= {shift_reg[54:0], 1'b0 };
end
end
end
always @(*) begin
if (state == WREG && state_cnt <= 'd23) begin
// reset
mosi_wreg = shift_reg[55];
end
else begin
mosi_wreg = 1'b0;
end
end
always @(*) begin
if (state == SYNC_S && state_cnt <= 'd8) begin
// reset
mosi_sync = shift_reg[55];
end
else begin
mosi_sync = 1'b0;
end
end
always @(*) begin
if (state == WAKEUP && state_cnt <= 'd8) begin
// reset
mosi_wakeup = shift_reg[55];
end
else begin
mosi_wakeup = 1'b0;
end
end
always @(*) begin
if (state == RDATAC && state_cnt <= 'd8) begin
// reset
mosi_rdatac = shift_reg[55];
end
else begin
mosi_rdatac = 1'b0;
end
end
endmodule
// -----------------------------------------------------------------------------
// Copyright (c) 2014-2025 All rights reserved
// -----------------------------------------------------------------------------
// Author : lvjitao lvjitao_o@163.com
// File : adc_ctrl_ads1256.v
// Create : 2025-10-18 09:06:14
// Revise : 2025-10-21 20:43:12
// Editor : sublime text3, tab size (4)
// -----------------------------------------------------------------------------
`timescale 1ns/1ps
module adc_ctrl_ads1256(
//uart
input wire clk,
input wire rst_n,
input wire [7:0] pi_data_rx,
input wire pi_flag_rx,
output wire [7:0] po_data_tx,
output wire po_flag_tx,
//1256 spi interface\
input wire miso,
output wire cs_n,
output reg sclk,
output wire mosi,
//1256 ads1256 signal\
input wire drdy, //adctive low
output reg reset, //adctive low
output wire sync //adctive low
);
localparam IDLE = 10'b0000000001;
localparam PREPARE_C = 10'b0000000010;
localparam WREG = 10'b0000000100;
localparam SYNC_S = 10'b0000001000;
localparam WAKEUP = 10'b0000010000;
localparam WAIT1 = 10'b0000100000;
localparam RDATAC = 10'b0001000000;
localparam MISO_S = 10'b0010000000;
localparam WAIT2 = 10'b0100000000;
localparam SDATAC = 10'b1000000000;
localparam RESET_MAX = 500 - 1;
localparam CLK_CNT_MAX = 50 - 1;
localparam STATE_CNT_MAX = 34;
localparam SY_WA_RD_STATE_CNT_MAX = 18;
localparam MISO_S_CNT_MAX = 24 - 1;
//cmd
localparam CMD_WREG = 24'h510078;
localparam CMD_SYNC = 8'hFC;
localparam CMD_WAKEUP = 8'hFF;
localparam CMD_RDATAC = 8'h03;
localparam CMD_SDATAC = 8'h0F;
reg [9:0] state;
reg [1:0] drdy_reg = 0;
reg [8:0] reset_adc_cnt;
reg [5:0] clk_cnt;
reg [5:0] state_cnt;
reg [56:0] shift_reg;
//delet
reg mosi_wreg;
reg mosi_sync;
reg mosi_wakeup;
reg mosi_rdatac;
reg [23:0] mosi_data;
reg data_flag;
assign cs_n = 1'b0;
assign sync = 1'b1;
always @(posedge clk ) begin
if (rst_n == 1'b0) begin
// reset
reset_adc_cnt <= 'd0;
end
else if (reset_adc_cnt != RESET_MAX) begin
reset_adc_cnt <= reset_adc_cnt + 1'b1;
end
end
always @(posedge clk ) begin
if (rst_n == 1'b0) begin
// reset
reset <= 1'b0;
end
else if (reset_adc_cnt == RESET_MAX) begin
reset <= 1;
end
end
always @(posedge clk ) begin
if (rst_n == 1'b0) begin
// reset
state <= 'd0;
end
else case (state)
IDLE: begin
if (pi_flag_rx == 1'b1 && pi_data_rx == 8'hcc) begin
state <= PREPARE_C;
end
else begin
state <= IDLE;
end
end
PREPARE_C: begin
if (drdy_reg == 2'b10) begin
state <= WREG;
end
else begin
state <= PREPARE_C;
end
end
WREG: begin
if (state_cnt == STATE_CNT_MAX && clk_cnt == CLK_CNT_MAX) begin
state <= SYNC_S;
end
end
SYNC_S: begin
if (state_cnt == SY_WA_RD_STATE_CNT_MAX && clk_cnt == CLK_CNT_MAX) begin
state <= WAKEUP;
end
end
WAKEUP: begin
if (state_cnt == SY_WA_RD_STATE_CNT_MAX && clk_cnt == CLK_CNT_MAX) begin
state <= WAIT1;
end
end
WAIT1: begin
if (drdy_reg == 2'b10) begin
state <= RDATAC;
end
end
RDATAC: begin
if (state_cnt == SY_WA_RD_STATE_CNT_MAX && clk_cnt == CLK_CNT_MAX) begin
state <= MISO_S;
end
end
MISO_S:begin
if (state_cnt == MISO_S_CNT_MAX || clk_cnt ==CLK_CNT_MAX) begin
state <= WAIT2;
end
end
WAIT2: begin
if (drdy_reg == 2'b10) begin
state <= MISO_S;
end
end
default: state <= IDLE;
endcase
end
always @(posedge clk ) begin
drdy_reg <= {drdy_reg[0], drdy};
end
always @(posedge clk ) begin
if (rst_n == 1'b0) begin
// reset
clk_cnt <= 0;
end
else if (state == WREG || state == SYNC_S || state == WAKEUP || state == RDATAC || state == MISO_S) begin
if (clk_cnt == CLK_CNT_MAX) begin
clk_cnt <= 0;
end
else begin
clk_cnt <= clk_cnt + 1'b1;
end
end
end
always @(posedge clk ) begin
if (rst_n == 'b0) begin
// reset
state_cnt <= 'd0;
end
else if (state == WREG ) begin
if (state_cnt ==STATE_CNT_MAX && clk_cnt == CLK_CNT_MAX) begin
state_cnt <= 'd0;
end
else if(clk_cnt == CLK_CNT_MAX) begin
state_cnt <= state_cnt + 1'd1;
end
end
else if (state == SYNC_S || state == WAKEUP || state == RDATAC) begin
if (state_cnt ==SY_WA_RD_STATE_CNT_MAX && clk_cnt == CLK_CNT_MAX) begin
state_cnt <= 'b0;
end
else if(clk_cnt == CLK_CNT_MAX) begin
state_cnt <= state_cnt + 1'd1;
end
end
else if (state == MISO_S) begin
if (state_cnt ==MISO_S_CNT_MAX && clk_cnt == CLK_CNT_MAX) begin
state_cnt <= 'd0;
end
else if(clk_cnt == CLK_CNT_MAX) begin
state_cnt <= state_cnt + 1'd1;
end
end
else begin
state_cnt <= 'b0;
end
end
always @(posedge clk ) begin
if (rst_n == 0) begin
// reset
sclk <= 0;
end
else if ((state == WREG && state_cnt <= 'd23) || ((state == SYNC_S || state == WAKEUP || state == RDATAC) && state_cnt <= 'd8) || state == MISO_S) begin
if (clk_cnt == CLK_CNT_MAX[6:1]) begin
sclk <= 1'b1;
end
else if (clk_cnt == CLK_CNT_MAX) begin
sclk <= 1'b0;
end
end
else begin
sclk <= 0;
end
end
always @(posedge clk ) begin
if (rst_n == 0) begin
// reset
shift_reg <= {CMD_WREG, CMD_SYNC, CMD_WAKEUP, CMD_RDATAC, CMD_SDATAC};
end
else if (state ==IDLE) begin
shift_reg <= {CMD_WREG, CMD_SYNC,CMD_WAKEUP, CMD_RDATAC, CMD_SDATAC};
end
else if ((state == WREG && state_cnt >= 1'd1 &&state_cnt <= 'd24) || ((state == SYNC_S || state == WAKEUP || state == RDATAC) && state_cnt >= 1'd1 &&state_cnt <= 'd8)) begin
if (clk_cnt == CLK_CNT_MAX[6:1]) begin
shift_reg <= {shift_reg[54:0], 1'b0 };
end
end
end
always @(posedge clk ) begin
if (rst_n == 0) begin
// reset
mosi_data <= 0;
end
else if (state == MISO_S ) begin
if (clk_cnt == CLK_CNT_MAX) begin
mosi_data <= {mosi_data[22:0], miso};
end
end
end
always @(posedge clk) begin
if (rst_n == 0) begin
// reset
data_flag <= 1'b0;
end
else if (state_cnt == MISO_S_CNT_MAX && state == MISO_S && clk_cnt == CLK_CNT_MAX) begin
data_flag <= 1'b1;
end
else begin
data_flag <= 0;
end
end
always @(*) begin
if (state == WREG && state_cnt <= 'd23) begin
// reset
mosi_wreg = shift_reg[55];
end
else begin
mosi_wreg = 1'b0;
end
end
always @(*) begin
if (state == SYNC_S && state_cnt <= 'd8) begin
// reset
mosi_sync = shift_reg[55];
end
else begin
mosi_sync = 1'b0;
end
end
always @(*) begin
if (state == WAKEUP && state_cnt <= 'd8) begin
// reset
mosi_wakeup = shift_reg[55];
end
else begin
mosi_wakeup = 1'b0;
end
end
always @(*) begin
if (state == RDATAC && state_cnt <= 'd8) begin
// reset
mosi_rdatac = shift_reg[55];
end
else begin
mosi_rdatac = 1'b0;
end
end
endmodule
// -----------------------------------------------------------------------------
// Copyright (c) 2014-2025 All rights reserved
// -----------------------------------------------------------------------------
// Author : lvjitao lvjitao_o@163.com
// File : tb_adc_ctrl_ads1256.v
// Create : 2025-10-18 16:17:48
// Revise : 2025-10-21 20:40:50
// Editor : sublime text3, tab size (4)
// -----------------------------------------------------------------------------
`timescale 1ns/1ps
module tb_adc_ctrl_ads1256(
);
reg clk, rst_n;
reg pi_flag;
reg [7:0] pi_data;
wire sclk;
wire cs_n, mosi, reset;
reg drdy;
reg miso;
reg [9:0] tb_state;
wire state_match_flag;
reg [23:0] adc_data;
assign state_match_flag = (tb_state == 10'h080) ? 1'b1 : 1'b0 ;
initial begin
clk = 0;
rst_n = 0;
repeat(10) @(posedge clk);
rst_n = 1;
end
always #10 clk = ~clk;
initial begin
drdy = 0;
pi_flag = 0;
pi_data = 0;
#10;
@(posedge rst_n);
repeat(10) @(posedge clk);
pi_flag <= 1;
pi_data <= 8'hcc;
@(posedge clk);
pi_flag <= 1'b0;
end
initial begin
#10;
gen_drdy();
end
initial begin
adc_data = 0;
miso = 0;
force tb_state = inst_adc_ctrl_ads1256.state;
#10;
gen_miso();
end
task gen_miso;
integer i,j;
begin
for( j= 0; j<100; j=j+1) begin
@(posedge state_match_flag) ;
@(posedge sclk);
miso = adc_data[23];
for (int i = 0; i<23; i=i+1) begin
@(posedge sclk);
miso = adc_data[23 - i - 1];
end
adc_data = adc_data + 1'b1;
end
end
endtask
task gen_drdy;
integer i;
begin
for(i=0; i<1000; i=i+1)begin
drdy <= 0;
#31000;
drdy <= 1;
#2333;
end
end
endtask
adc_ctrl_ads1256 inst_adc_ctrl_ads1256(
.clk (clk),
.rst_n (rst_n),
.pi_data_rx (pi_data),
.pi_flag_rx (pi_flag),
.po_data_tx (),
.po_flag_tx (),
.miso (miso),
.cs_n (cs_n),
.sclk (sclk),
.mosi (mosi),
.drdy (drdy),
.reset (reset),
.sync (sync)
);
endmodule

























 2726
2726

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









