









转自:http://blog.csdn.net/twowind/article/details/8988282
分水岭算法(watershed)是一种比较基本的数学形态学分割算法,其基本思想是将灰度图像转换为梯度图像,将梯度值看作高低起伏的山岭,将局部极小值及其邻域看作一个“集水盆”。设想一个个“集水盆”中存在积水,且水位不断生长,淹没低度较低的地方,当水漫过程停止后,图像就可以被分割成几块连通区域。
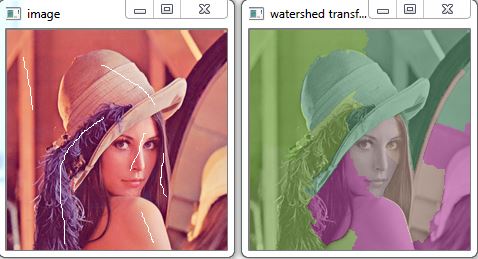
分水岭算法有不同的实现方法。本文要实现的是通过人为标注一些种子点,将这些种子点看作集水盆的底部,利用区域增长的方法,完成图像的分割。试图实现OpenCV中cv::watershed函数的功能,经过测试,与OpenCV相比分割结果相似,但性能差很多。(前者32ms左右,后者8ms左右)。
OpenCV函数的运行结果:(OpenCV函数对分割边缘也做了处理,我写的那个程序没有)

程序运行结果:
参考:
http://wenku.baidu.com/view/d1fde240336c1eb91a375d95.html
http://blog.csdn.net/fdl19881/article/details/6749976
- #include <opencv2/imgproc/imgproc.hpp>
- #include <opencv2/objdetect/objdetect.hpp>
- #include <opencv2/highgui/highgui.hpp>
- #include<vector>
- #include<iostream>
- #include<queue>
- #include<fstream>
- cv::Mat marker_mask;
- cv::Mat g_markers;
- cv::Mat img0, img, img_gray,wshed;
- cv::Point_<int> prev_pt(-1,-1);
- using std::vector;
- using std::queue;
- static void my_watershed(cv::Mat img,cv::Mat& markers,int comp_count);
- static void mouse_event(int event,int x, int y,int flags, void*)
- {
- if(img.rows==0)
- return;
- if(event==CV_EVENT_LBUTTONUP||!(flags&CV_EVENT_FLAG_LBUTTON))
- prev_pt=cv::Point_<int>(-1,-1);
- else if(event==CV_EVENT_LBUTTONDOWN)
- prev_pt=cv::Point2i(x,y);
- else if(event==CV_EVENT_MOUSEMOVE&&(flags&CV_EVENT_FLAG_LBUTTON))
- {
- cv::Point2i pt(x,y);
- if(prev_pt.x<0)
- prev_pt=pt;
- cv::line(marker_mask,prev_pt,pt,cv::Scalar(255,255,255),1,8,0);
- cv::line(img,prev_pt,pt,cv::Scalar(255,255,255),1,8,0);
- prev_pt=pt;
- cv::imshow("image",img);
- }
- }
- int main()
- {
- img0=cv::imread("Lenna.png",1);
- img=img0.clone();
- CvRNG rng = cvRNG(-1);
- img_gray=img0.clone();
- wshed=img0.clone();
- marker_mask=cv::Mat(cv::Size(img0.cols,img0.rows),8,1);
- g_markers=cv::Mat(cv::Size(img0.cols,img0.rows),CV_32S,1);
- cv::cvtColor(img,marker_mask,CV_BGR2GRAY);
- cv::cvtColor(marker_mask,img_gray,CV_GRAY2BGR);
- for(int i=0;i<marker_mask.rows;i++)
- for(int j=0;j<marker_mask.cols;j++)
- marker_mask.at<unsigned char>(i,j)=0;
- for(int i=0;i<g_markers.rows;i++)
- for(int j=0;j<g_markers.cols;j++)
- g_markers.at<int>(i,j)=0;
- cv::imshow("image",img);
- cv::imshow("watershed transform",wshed);
- cv::setMouseCallback("image",mouse_event,0);
- for(;;)
- {
- int c=cv::waitKey(0);
- if((char)c==27)
- break;
- if((char)c=='r')
- {
- for(int i=0;i<marker_mask.rows;i++)
- for(int j=0;j<marker_mask.cols;j++)
- marker_mask.at<unsigned char>(i,j)=0;
- img0.copyTo(img);
- cv::imshow("image",img);
- }
- if((char)c=='w'||(char)c==' ')
- {
- vector<vector<cv::Point>> contours;
- CvMat* color_tab=0;
- int comp_count=0;
- cv::findContours(marker_mask,contours,CV_RETR_CCOMP,CV_CHAIN_APPROX_SIMPLE,cv::Point(0,0));
- for(int i=0;i<g_markers.rows;i++)
- for(int j=0;j<g_markers.cols;j++)
- g_markers.at<int>(i,j)=0;
- vector<vector<cv::Point> >::iterator iter=contours.begin();
- for(int i=0;i<(int)contours.size();i++)
- {
- cv::drawContours(g_markers,contours,i,cv::Scalar::all(comp_count+1),
- 1,8,vector<cv::Vec4i>());
- comp_count++;
- }
- if(comp_count==0)
- continue;
- color_tab=cvCreateMat(1,comp_count,CV_8UC3);
- for(int i=0;i<comp_count;i++)
- {
- uchar* ptr=color_tab->data.ptr+i*3;
- ptr[0]=(uchar)(cvRandInt(&rng)%180+50);
- ptr[1]=(uchar)(cvRandInt(&rng)%180+50);
- ptr[2]=(uchar)(cvRandInt(&rng)%180+50);
- }
- cv::Mat temp=g_markers.clone();
- double t=(double)cvGetTickCount();
- //my_watershed(img0,g_markers,comp_count);
- cv::watershed(img0,g_markers);
- t=(double)cvGetTickCount()-t;
- std::cout<<"exec time= "<<t/(cvGetTickFrequency()*1000.)<<std::endl;
- for(int i=0;i<g_markers.rows;i++)
- for(int j=0;j<g_markers.cols;j++)
- {
- int idx=g_markers.at<int>(i,j);
- uchar* dst=&wshed.at<uchar>(i,j*3);
- if(idx==-1)
- dst[0]=dst[1]=dst[2]=(uchar)255;
- else if(idx<=0||idx>comp_count)
- dst[0]=dst[1]=dst[2]=(uchar)8;
- else{
- uchar* ptr=color_tab->data.ptr+(idx-1)*3;
- dst[0]=ptr[0];dst[1]=ptr[1];dst[2]=ptr[2];
- }
- }
- cv::addWeighted(wshed,0.5,img_gray,0.5,0,wshed);
- cv::imshow("watershed transform",wshed);
- cvReleaseMat(&color_tab);
- }
- }
- return 0;
- }
- static void my_watershed(cv::Mat img0,cv::Mat& markers,int comp_count)
- {
- cv::Mat gray=cv::Mat(cv::Size(img0.rows,img0.cols),8,1);
- cv::cvtColor(img0,gray,CV_BGR2GRAY);
- cv::Mat imge=cv::Mat(cv::Size(img0.rows,img0.cols),8,1);
- cv::Sobel(gray,imge,CV_8U,1,1);
- vector<queue<cv::Point2i>*>Labeleddata;//图像中各连通区域的点
- queue<cv::Point2i>* pque;//某连通区域已包含的点
- queue<cv::Point2i> quetem; //用于提取某连通区域中输入种子点中的初始种子点
- vector<int*> SeedCounts;
- int* Array;
- cv:: Point2i temp;
- int row=imge.rows,col=imge.cols;
- cv::Mat marker_saved=markers.clone();
- bool up,down,right,left,uplef,uprig,downlef,downrig;
- int m,n;
- for(int i=0;i<comp_count;i++)
- {
- Array=new int[256];
- SeedCounts.push_back(Array);//统计某waterlevel的各个连通区域中种子点的个数
- pque=new queue<cv::Point2i>[256];
- Labeleddata.push_back(pque);//存储该连通区域中种子生长所得的点
- }
- for(int i=0;i<row;i++)
- for(int j=0;j<col;j++)
- {
- if(markers.at<int>(i,j)>0)
- {
- temp.x=i;
- temp.y=j;
- quetem.push(temp);
- int num=markers.at<int>(i,j);
- markers.at<int>(i,j)=-1;//该点已处理,其他种子点生长时将绕过该点
- while(!quetem.empty())
- {
- up=down=right=left=uplef=uprig=downlef=downrig=false;
- temp=quetem.front(); //提取出一个点,在该点的八连通区域内寻找可生长点
- m=temp.x;
- n=temp.y;
- quetem.pop();
- if(m-1>=0)//若上方可生长则添加为新种子
- {
- if(markers.at<int>(m-1,n)==num)
- {
- temp.x=m-1;
- temp.y=n;
- quetem.push(temp);
- markers.at<int>(m-1,n)=-1;
- }
- else{
- up=true;
- }
- }
- if(m-1>=0&&n-1>=0)
- {
- if(markers.at<int>(m-1,n-1)==num)
- {
- temp.x=m-1;
- temp.y=n-1;
- quetem.push(temp);
- markers.at<int>(m-1,n-1)=-1;
- }
- else{
- uplef=true;
- }
- }
- if(m+1<=row-1)
- {
- if(markers.at<int>(m+1,n)==num)
- {
- temp.x=m+1;
- temp.y=n;
- quetem.push(temp);
- markers.at<int>(m+1,n)=-1;
- }
- else{
- down=true;
- }
- }
- if(m+1<=row-1&&n+1<=col-1)
- {
- if(markers.at<int>(m+1,n+1)==num)
- {
- temp.x=m+1;
- temp.y=n+1;
- quetem.push(temp);
- markers.at<int>(m+1,n+1)=-1;
- }
- else{
- downrig=true;
- }
- }
- if(n+1<=col-1)
- {
- if(markers.at<int>(m,n+1)==num)
- {
- temp.x=m;
- temp.y=n+1;
- quetem.push(temp);
- markers.at<int>(m,n+1)=-1;
- }
- else{
- right=true;
- }
- }
- if(m-1>=0&&n+1<=col-1)
- {
- if(markers.at<int>(m-1,n+1)==num)
- {
- temp.x=m-1;
- temp.y=n+1;
- quetem.push(temp);
- markers.at<int>(m-1,n+1)=-1;
- }
- else{
- uprig=true;
- }
- }
- if(n-1>=0)
- {
- if(markers.at<int>(m,n-1)==num)
- {
- temp.x=m;
- temp.y=n-1;
- quetem.push(temp);
- markers.at<int>(m,n-1)=-1;
- }
- else{
- left=true;
- }
- }
- if(m+1<=row-1&&n-1>=0)
- {
- if(markers.at<int>(m+1,n-1)==num)
- {
- temp.x=m+1;
- temp.y=n-1;
- quetem.push(temp);
- markers.at<int>(m+1,n-1)=-1;
- }
- else{
- downlef=true;
- }
- }
- //八连通区域中有未标记点,则该点属于初始种子点
- if(up||down||right||left||uplef||downlef||uprig||downrig)
- {
- temp.x=m;
- temp.y=n;
- Labeleddata[comp_count-1][imge.at<uchar>(m,n)].push(temp);
- SeedCounts[comp_count-1][imge.at<uchar>(m,n)]++;
- }
- }
- }
- }
- bool active;
- int waterlevel;
- for(waterlevel=0;waterlevel<180;waterlevel++)
- {
- active=true;
- while(active) //当1-count_com个连通区域都无可生长点时结束循环
- {
- active=false;
- for(int i=0;i<comp_count;i++)//将区域i中将waterlevel梯度以下的点用于区域增长
- {
- if(!Labeleddata[i][waterlevel].empty())//区域增长,经过多次迭代,直至该区域,该waterlevel无可生长点。
- {
- active=true;
- while(SeedCounts[i][waterlevel]>0) //SeedCount中保留了前一轮生长后各区域,各waterlevel的种子点个数,本轮生长结束后,将根据Labeleddata中的元素个数更新
- {
- SeedCounts[i][waterlevel]--;
- temp=Labeleddata[i][waterlevel].front();
- Labeleddata[i][waterlevel].pop();
- m=temp.x;
- n=temp.y;
- int num=marker_saved.at<int>(m,n);
- if(m-1>=0)
- {
- if(!marker_saved.at<int>(m-1,n))//上方点未处理过
- {
- temp.x=m-1;
- temp.y=n;
- marker_saved.at<int>(m-1,n)=num;
- if(imge.at<uchar>(m-1,n)<=waterlevel)
- Labeleddata[i][waterlevel].push(temp);
- else{
- Labeleddata[i][imge.at<uchar>(m-1,n)].push(temp); //本次生长不处理,可能在waterlevel变化到某值时再用于生长
- SeedCounts[i][imge.at<uchar>(m-1,n)]++;
- }
- }
- }
- if(m+1<=row-1)
- {
- if(!marker_saved.at<int>(m+1,n))
- {
- temp.x=m+1;
- temp.y=n;
- marker_saved.at<int>(m+1,n)=num;
- if(imge.at<uchar>(m+1,n)<=waterlevel)
- Labeleddata[i][waterlevel].push(temp);
- else{
- Labeleddata[i][imge.at<uchar>(m+1,n)].push(temp);
- SeedCounts[i][imge.at<uchar>(m+1,n)]++;
- }
- }
- }
- if(n+1<=col-1)
- {
- if(!marker_saved.at<int>(m,n+1))
- {
- temp.x=m;
- temp.y=n+1;
- marker_saved.at<int>(m,n+1)=num;
- if(imge.at<uchar>(m,n+1)<=waterlevel)
- Labeleddata[i][waterlevel].push(temp);
- else{
- Labeleddata[i][imge.at<uchar>(m,n+1)].push(temp);
- SeedCounts[i][imge.at<uchar>(m,n+1)]++;
- }
- }
- }
- if(n-1>=0)
- {
- if(!marker_saved.at<int>(m,n-1))
- {
- temp.x=m;
- temp.y=n-1;
- marker_saved.at<int>(m,n-1)=num;
- if(imge.at<uchar>(m,n-1)<=waterlevel)
- Labeleddata[i][waterlevel].push(temp);
- else
- {
- Labeleddata[i][imge.at<uchar>(m,n-1)].push(temp);
- SeedCounts[i][imge.at<uchar>(m,n-1)]++;
- }
- }
- }
- }
- SeedCounts[i][waterlevel]=Labeleddata[i][waterlevel].size();
- }
- }
- }
- }
- markers=marker_saved.clone();
- }















 2803
2803











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









