







文章目录
@article{FFBS2018BRPm-vehicle-visit,
author = {Liu, Ying and Szeto, W Y and Ho, Sin C},
doi = {https://doi.org/10.1016/j.trc.2018.02.008},
issn = {0968-090X},
journal = {Transportation Research Part C: Emerging Technologies},
keywords = { Multiple depots, Multiple heterogeneous vehicles, Multiple visits, Static bike repositioning problem,Free-floating bike sharing},
pages = {208--242},
title = {{A static free-floating bike repositioning problem with multiple heterogeneous vehicles, multiple depots, and multiple visits}},
url = {https://www.sciencedirect.com/science/article/pii/S0968090X18301761},
volume = {92},
year = {2018}
}
摘要
本文研究了自由浮动共享单车系统(free-floating bike-sharing system)(FFBSS) 多车场、多访问、多异构车辆的自行车重新定位问题(a bike repositioning problem with multiple depots, multiple visits, and multiple heterogeneous vehicle)。定义了两种类型的节点(即容易和几乎无法访问的节点),具有不同的惩罚,以表示从 FFBSS 获取自行车的不同便利程度。重新定位的目的是尽量减少从系统获取自行车的不便程度与未满足的总需求和总运行时间的加权总和(The objective of the repositioning is to minimize the weighted sum of the inconvenience level of getting bikes from the system and the total unmet demand and the total operational time)。为了解决这个问题,开发了一种增强版本的化学反应优化(chemical reaction optimization)(CRO)。提出了一种考虑节点特征的装卸量调整程序,包括节点类型及其当前状态(即平衡、盈余或赤字状态),并将其纳入该版本,以提高其求解质量。还提出了近节点集的概念来缩小搜索空间。数值结果表明,与传统的CRO和CPLEX相比,增强型CRO提高了解决方案质量,并有可能解决更大、更长的重新定位时间和更多的车辆实例的重新定位问题。结果也证明了所提出的调整程序的有效性。
1. Introduction
自行车共享系统(BSS)是一种短期租赁服务,为客户提供共享使用的自行车。它在世界范围内发展迅速。截至 2017年11月28日,约有 18 个城市提供公共自行车共享系统,其中包括全球约 740,100,2017 辆自行车(Meddin and DeMaio,http://www.bikesharingworld.com)。
目前全球有两种类型的BSS:传统BSS和自由浮动BSS(FFBSS)。在传统的BSS中,用户必须从指定的扩展坞租用自行车,并在使用后将其放回扩展坞中的可用储物柜中。在一些FFBSS中,自行车架或任何实心框架或独立装置可用于锁定自行车而不是扩展坞,这也是传统BSS中最昂贵的组件。自行车架成本低,因此设置成本低于传统BSS,并且FFBSS中的机架数量可能非常大。一些FFBSS(例如,中国的摩拜单车系统)删除了自行车架的概念或相关概念。这些系统中的锁只是固定后轮,智能手机提供了用于定位、结账、返回、锁定和付款的用户界面。借助全球定位系统(GPS),用户可以预订或直接租用最近的可用自行车,并在旅行结束时将其归还到操作区域的几乎任何地方。借助此功能,FFBSS 的用户无需花时间在扩展坞处寻找可用的储物柜即可归还自行车。与传统的BSS相比,此功能使FFBSS更加灵活和用户友好。然而,这也导致自行车的分布更加分散,并提出了一个问题,即一些自行车停在公众难以观察的位置(Abdullah,2017)。随着系统的继续运行,用户很难根据GPS提供的位置搜索可用的自行车(Abdullah,2017)。与传统的BSS一样,在FFBSS中重新分配自行车是提高系统性能的必要条件,例如用户从共享系统获取自行车的便利性和需求不满。此重新定位问题称为共享单车重新定位问题 (BRP)。
传统BSS的BRP已被许多现有研究检查和解决。其中,很少有研究(Caggiani and Ottomanelli, 2012, Contardo et al., 2012, Regue and Recker, 2014, Brinkmann et al., 2015a, Brinkmann et al., 2015b, Labadi et al., 2015, Zhang et al., 2017, Shui and Szeto, 2018) 处理动态自行车重新定位问题(dynamic bike repositioning problem),该问题捕获重新定位期间的需求变化。大多数现有研究(Benchimol et al., 2011, Nair and Miller-Hooks, 2011, Chemla et al., 2013, Di Gaspero等人, 2013a, Di Gaspero等人, 2013b, Di Gaspero等人, 2016, Nair et al., 2013, Papazek et al., 2013, Papazek et al., 2014, Raviv et al., 2013,Rainer-Harbach 等人,2013 年,Rainer-Harbach 等人,2015 年,Dell’Amico 等人,2014 年,Dell’Amico 等人,2016 年,Erdoğan 等人,2014 年,Erdoğan 等人,2015 年,Ho and Szeto,2014 年,Ho and Szeto,2017 年,Brinkmann 等人,2015a,Brinkmann 等人,2015b,Forma等人,2015年,Alvarez-Valdes等人,2016年,卡萨扎,2016年,Kadri等人,2016年,李等人,2016年,司徒等人,2016年,克鲁兹等人,2017年,Schuijbroek等人,2017年) 专注于静态自行车重新定位问题,其中通常假设在重新定位操作期间没有或可以忽略不计的需求,目标是在下一个工作日将自行车安排在系统中。为了解决现实生活中的BRP,大多数现有研究都开发了不精确的求解方法,包括近似法、启发式、元启发式以及混合启发式和精确方法
要制定良好的搬迁策略,必须准确估计自行车需求。一些努力集中在自行车需求预测上。例如,Rudloff和Lackner(2014)开发了自行车和可用储物柜的需求模型,可以预测未来一周车站趋于满或空的时间。Singhvi等人(2015)通过考虑出租车使用,天气和空间变量,预测了纽约花旗自行车在早高峰时段的自行车使用模式和自行车需求。然而,这些研究侧重于传统的BSS。
与传统BSS的研究相比,很少有论文关注FFBSS,包括预测FFBSS和自由浮动BRP(FFBRPs)的需求。例如,为了增强自行车的重新分配,Reiss和Bogenberger(2016)确定了自行车使用的移动模式并预测了即将到来的需求,而Caggiani等人(2016)提出了一种生成时空集群并预测自行车使用趋势的方法。
在撰写本文时,只有一项研究涉及FFBRP。Pal和Zhang(2017)考虑了FFBSS的多车辆静态重新定位。目标是使FFBSS处于最佳状态(即,没有站点处于赤字状态)并最小化车辆的制造跨度(见csdn的论文阅读:Free-floating bike sharing: Solving real-life large-scale staticrebalancing problems)。允许多次访问具有单调装卸操作的车站( monotone loading)意思是这里的车站要么装载要么卸载,不会即装又卸。它们的公式仅从Erdoğan等人(2015)提出的公式修改而来,用于像处理传统BRP一样处理多车辆重新定位。针对该问题,该文提出一种基于变邻域下降的混合嵌套大邻域搜索算法。但是,他们没有考虑FFBSS的任何独特功能,例如在制定和解决问题时获得自行车的不便程度。根据Abdullah(2017)的说法,自行车使用者有时很难在FFBSS中找到未使用的自行车,因为它们处于不便,难以看到或不常见的位置。这些自行车的利用率相对较低,这使得系统中的需求不满无法完全最小化。为了提高利用率和需求不满,需要一种新的方法来模拟这一独特特征并确定重新定位策略。
在这项研究中,我们考虑了从 FFBSS 获得自行车的便利程度。根据便利程度定义了两种类型的节点:易于访问的节点表示公众熟知的位置(例如,自行车架的指定位置或热门位置),而几乎无法访问的节点被定义为不为公众欢迎、不容易找到或向公众引入较长搜索时间的位置(例如, 分散的自行车的位置)。在此 FFBRP 中,几乎无法访问的节点的自行车被运送到易于访问的节点,尤其是那些短缺的节点。因此,为这个FFBSS重新分配自行车不仅可以减少未满足的总需求,还可以提高从系统中获取自行车的便利性(reallocating bikes for this FFBSS is not only to reduce the total unmet demand, but also to increase the convenience level of getting bikes from the system.)。假设这种重新定位由多辆车在夜间执行,因此该问题被表述为多车静态FFBRP。为了解决该BRP,提出了一种增强版本的化学反应优化(CRO)。与传统版本相比,增强版有四大区别:🐸首先,增强型CRO考虑了FFBRP的特性,即两类节点。🐸其次,增强型CRO应用新提出的算子来调整加载/卸载数量,特别是在几乎无法访问的节点上,以提高其解决方案质量。🐸第三,在增强版中采用方案调整策略</font">,保证方案的可行性和良好质量。🐸第四,增强版使用不同的邻里运营商和标准来获取新路线。为了证明增强型 CRO 的有效性,使用了不同的测试场景,并比较了从 IBM ILOG CPLEX、原始 CRO 和增强型 CRO 获得的结果。此外,还讨论了所提出的子程序的性能。
本文的贡献如下:
- 本文在考虑便利性水平的情况下制定了FFBRP,其中与FFBSS相关的特殊功能以前从未建模过。
- 此问题考虑了 (1) 多个仓库multiple depots;(2)多种异构车辆 multiple heterogeneous vehicles;(3)每辆车固定起动车辆段和柔性终点站 fixed starting depot and flexible ending depot for each vehicle;(4)同一车辆多次访问节点multiple-visits of nodes by the same vehicle,(5)节点处非单调装卸作业,比现有的传统BRP更复杂non-monotone loading and unloading operations at nodes, which is more complicated than existing traditional BRPs.
- 提出了CRO的增强版本。它在开发子例程以调整节点的加载或卸载量时考虑节点特征,特别是对于几乎无法访问的节点。这些数量根据节点的类型及其当前状态(即处于平衡、盈余或赤字状态)进行调整。我们的实验结果表明,该子程序有助于更好的解决方案。
- 本研究改进了传统CRO来解决FFBRP。提出近节点集的概念来缩小搜索空间。结果表明,增强型CRO比传统CRO获得更好的解决方案。
2. Formulation
FFBSS由一个完全有向图complete directed graph
G
0
=
(
V
0
,
A
0
)
G_0=(V_0,A_0)
G0=(V0,A0)表示,其中
V
0
V_0
V0表示 sets of nodes,
A
0
A_0
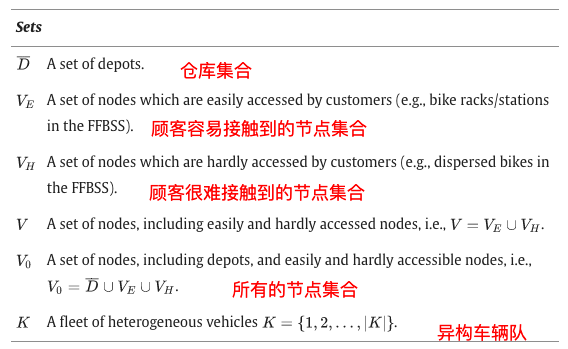
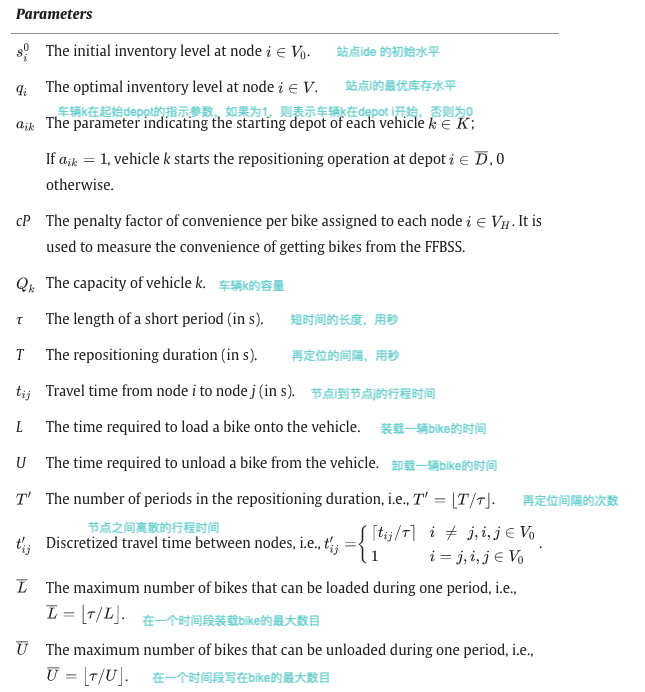
A0表示set of arcs. 本研究考虑了多个depot。车辆可能不会在同一depot开始和结束重新定位。所有节点都可以多次访问,并被视为缓冲节点buffer nodes。也就是说,允许在每个节点进行非单调的装载和卸载操作。我们还假设几乎不访问的节点的需求量为 0。重新定位的持续时间被划分为许多相等的时间段,称为时段。重新定位问题是一个多阶段问题multiple period problem,使用以下符号表示。
再定位问题可以如下表示为。
objective (1)旨在最小化下面的和:
1)不满足客户的总数目反映在 ∑ i ∈ V E ψ i \sum_{i\in V_E} \psi_i ∑i∈VEψi, V E V_E VE是顾客容易接触到的节点集合。
2) 从FFBSS中获得一辆bike的不便利程度反映在几乎无法访问的节点集 V H V_H VH中的自行车的总惩罚。 c P cP cP是惩罚因子, s i T ′ s_{iT'} siT′是再定位结束时的库存水平
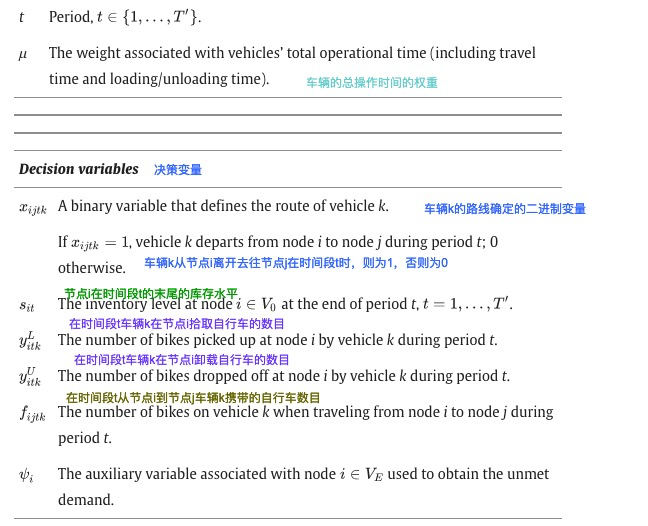
3)vehicle的总操作时间的加权,包括节点之间的行程时间( ∑ i , j ∈ V 0 ∑ t ≥ t i j ′ t i j x i , j , t − t i j ′ , k \sum_{i,j\in V_0}\sum_{t \geq t'_{ij}}t_{ij}x_{i,j,t-t'_{ij},k} ∑i,j∈V0∑t≥tij′tijxi,j,t−tij′,k),装载\卸载bike的时间( ∑ i ∈ V 0 ∑ t ≥ 1 ( L ⋅ y i t k K + U ⋅ y i t k U ) \sum_{i\in V_0}\sum_{t\geq 1}(L\cdot y_{itk}^K+U\cdot y_{itk}^U) ∑i∈V0∑t≥1(L⋅yitkK+U⋅yitkU))。 μ \mu μ如果值比较大,那么目标函数重点考虑vehicle的操作时间,如果值比较小,则更考虑自行车系统重的不满。
bike的travel有一个很大的区别就是时间的长度不一致。那么如何用指标表示呢?在这里做如下图的猜测。
如下图中有一个完全有向图,节点2与节点1,3,5,分别消耗的行程时间为 t 21 , t 23 , t 25 t_{21},t_{23},t_{25} t21,t23,t25.有一个划分的时间间隙用 τ \tau τ表示,根据 t i j ′ t'_{ij} tij′的定义,可以获得 t 21 ′ = 1 , t 23 ′ = 2 , t 25 ′ = 3 t'_{21}=1,t'_{23}=2,t'_{25}=3 t21′=1,t23′=2,t25′=3.假设在整个再定位操作的时间区域划分为 T ′ = 4 T'=4 T′=4个时间段。则节点之间的行程就可以表示为 x i , j , t − t i j ′ , k x_{i,j,t-t'_{ij},k} xi,j,t−tij′,k,在这些变量中,如果值为1,则表示有一个车的行程,值的提醒的是,车可能不是只经过一次,因为本文没有对拜访一次做约束。
> 约束(2) 定义了 ψ i \psi_i ψi. q i q_i qi表示节点 i i i的最优水平, s i T ′ s_{iT'} siT′表示再定位结束时的库存水平
 > 约束 (3)、(4) 是与库存相关的约束。约束 (3) 定义每个节点的初始清单。约束 (4) 描述了周期 t 期间每个节点的自行车守恒;如果 ,则 t=T′ 定义重新定位操作结束时每个节点的清单级别。
> 约束 (3)、(4) 是与库存相关的约束。约束 (3) 定义每个节点的初始清单。约束 (4) 描述了周期 t 期间每个节点的自行车守恒;如果 ,则 t=T′ 定义重新定位操作结束时每个节点的清单级别。
约束 (5)、(6)、(7)、(8) 用于定义车辆路线。约束 (5) 限制每辆车必须在其起始仓库启动重新定位操作。约束 (6) 限制每辆车不能在其起始仓库以外的任何节点启动重新定位操作。约束 (7) 表示每辆车必须在重新定位操作结束时返回一个仓库 i ∈ D ˉ i∈\bar{D} i∈Dˉ (可能与其起始仓库不同)。约束 (8) 意味着如果车辆 k 在周期 t 期间到达节点 i,则它必须在周期 t-tij′ 内从节点 j 离开到节点 i。约束 (5)、(6)、(7)、(8) 意味着每个节点(包括仓库、易于访问的节点和几乎无法访问的节点)都可以由单个车辆多次访问。
约束 (9)、(10)、(11)、(12) 与车辆上的自行车负载有关。约束 (9) 指出在周期 t 中车辆 k 上的自行车保存。约束(10)是车辆容量约束。它确保车辆 k 上的自行车数量不应超过其容量。约束 (11) 指示在重新定位操作开始之前车辆为空的初始状态 (t = 0)。(但是,当 t > 0 时,可以将自行车装载到仓库的车辆上。约束 (12) 要求操作结束后每辆车上没有自行车 ( t=T′ )。这意味着装载到车辆上的所有自行车在重新定位操作结束时都会卸载。
约束 (13)、(14) 用于限制装卸数量。约束 (13) 确保每个周期 t 内每个节点 i 的装载量不应超过实际最大数量(即 L ˉ \bar{L} Lˉ 和 U ˉ \bar{U} Uˉ )和车辆容量的两倍,如果节点 i 在周期 t 中被车辆 k 访问。类似地,约束 (14) 限制节点 $i∈\bar{D}∪V_E 的卸载量。约束 (13)、(14) 意味着允许在任何节点进行临时存储/供应。使用实际最大数量的两倍可以利用可能由实际(而不是四舍五入)行驶时间创建的时间可宽延时间。
约束 (15)、(16) 定义了每个周期和车辆的总操作时间的上限和下限,包括路线行驶时间和装卸操作的服务时间。实际行驶时间 tij (可以是实数)用于这些约束的左侧。约束(15)意味着每辆车执行的重新定位操作必须在案件 w=T′ 的重新定位持续时间内完成。约束 (16) 用于使计划计划的时间接近其执行(Raviv 等人,2013 年)。
约束 (17)、(18)、(19)、(20)、(21)、(22) 是域约束。
与经典的弧形索引公式不同,上述公式可以捕获单个车辆对节点的多次访问和车辆的同步,并且是从Raviv等人(2013)提出的时间索引公式修改而来的。主要修改如下:
- 使用不同的目标函数,考虑总未满足需求、几乎无法访问的节点上自行车的总惩罚和总运行时间(包括行驶时间和装卸时间)(请参阅目标 (1) 和约束 (2)、(22))。
- 在我们的问题中,考虑了多仓库和多车辆。车辆从其停放的起始仓库开始重新定位操作(它们可能不会停在同一仓库)。添加约束 (5) 以定义每辆车的起始仓库。
- 假设每辆车都可以返回到与它开始重新定位操作的仓库不同的仓库。添加了约束 (7) 以定义车辆在重新定位操作结束时必须返回任何仓库。
- 假设在重新定位操作之前和之后所有车辆都是空的(请参阅约束 (11)、(12))。
- 在这个问题中,假设自行车可以停放在共享系统的任何位置。因此,消除了工作站容量限制。
- 当在约束(15)中使用时 x j , i , t − t j i ′ , k x_{j,i,t-t_{ji}′,k} xj,i,t−tji′,k ,我们必须确保它是 t − t j i ′ ⩾ 0 t-t_{ji}′⩾0 t−tji′⩾0, x j , i , t − t j i ′ , k x_{j,i,t-t_{ji}′,k} xj,i,t−tji′,k 明确定义的。
- 当 x j , i , t − t j i ′ , k x_{j,i,t-t_{ji}′,k} xj,i,t−tji′,k和 t − t j i ′ ⩾ 0 t-t_{ji}′⩾0 t−tji′⩾0 用于定义约束 (16) 时 ,可能会在车站发生额外的自行车装卸, t − t j i ′ < 0 t-t_{ji′}<0 t−tji′<0 因为这些额外的操作用于诱导操作时间以确保满足下限要求。因此,在修订后的约束中, x i j t k x_{ijtk} xijtk 是用来避免此类问题的。
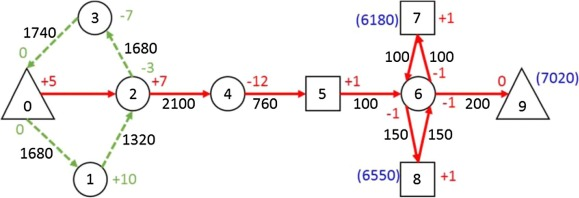 Fig. 1. Problem illustration.
Fig. 1. Problem illustration.
图1中的车辆路线为:
- 车辆1: 0 ( 0 ) → 1 ( + 10 ) → 2 ( − 3 ) → 3 ( − 7 ) → 0 ( 0 ) 0(0)\to 1(+10)\to2(-3)\to3(-7)\to0(0) 0(0)→1(+10)→2(−3)→3(−7)→0(0)
- 车辆2: 0 ( + 5 ) → 2 ( + 7 ) → 4 ( − 12 ) → 5 ( + 1 ) → 6 ( − 1 ) → 7 ( + 1 ) → 6 ( − 1 ) → 8 ( + 1 ) → 6 ( − 1 ) → 9 ( 0 ) 0(+5)\to2(+7)\to4(-12)\to5(+1)\to 6(-1)\to 7(+1)\to6(-1)\to8(+1)\to 6(-1)\to9(0) 0(+5)→2(+7)→4(−12)→5(+1)→6(−1)→7(+1)→6(−1)→8(+1)→6(−1)→9(0)
图 1 说明了我们的问题允许单个车辆多次访问一个节点,并同步不同的车辆,以在一定时间内尽可能减少未满足的需求和总罚款。此外,它说明了车辆的起始仓库可以与终点仓库不同。 三角形节点表示仓库,圆形节点表示易于访问的节点,方形节点表示几乎无法访问的节点。这些节点内的编号是节点编号。每个节点旁边括号中未括的数字表示装卸数量;正号表示装载,负号表示卸载。某些节点旁边的括号中的数字是车辆到达这些节点的时间。为清楚起见,并非所有抵达时间都显示。每个弧旁边的数字是以秒为单位的行进时间。重新定位持续时间为7200秒。自行车的装卸时间为 60 秒。有两辆车。车辆 1 可容纳 10 人,车辆 2 可容纳 20 人。车辆 1(虚线)的路线在同一站点开始和结束,而另一个(实线)则不。两辆车最初都是空的,同时开始运行。车辆 1 在时间为零离开节点 0,而车辆 2 在时间 0 在节点 0 拾取 5 辆自行车,并在 300 秒时离开节点 0。在节点 2 处,可以提供 4 辆额外的自行车来为其他节点提供服务,而不会在那里引入需求不满,但车辆 2 在那里再拾取 3 辆自行车来服务节点 4(最大的需求站),这需要 12 辆自行车才能达到平衡状态节点 2 在车辆 2 离开节点 2 后,车辆 1 再提供 3 辆自行车。因此,节点 2 是临时供应节点。 车辆 2 还访问节点 6 三次,以在(相邻)几乎无法访问的节点上拾取所有自行车,以尽量减少总罚款。在该示例中,可以很容易地检查在整个重新定位操作过程中是否满足每辆车的车辆容量约束,并且两辆车中每辆车的运行时间都小于7200 s。
3. Enhanced chemical reaction optimization
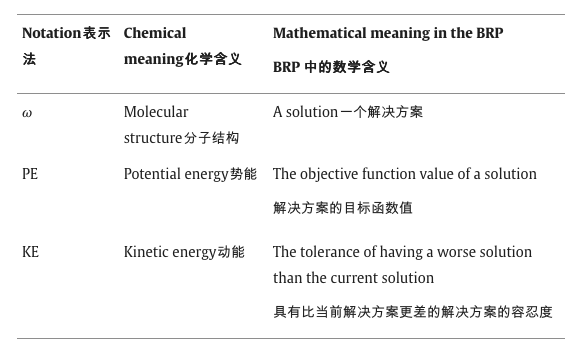
CRO在显微镜下松散地模拟化学反应系统中分子发生的情况(Lam和Li,2010)。它试图捕捉反应产生能量最低的产物的现象。CRO有两个主要组成部分:分子和基本反应。每个分子(用M表示)的特征在于表1中列出的性质。
 基本反应模拟分子之间碰撞序列的发生,以获得其最低能量状态。不同条件下的碰撞导致不同的基本反应,每个反应可能具有不同的方式来操纵相关分子的能量。在CRO中,有四种类型的基本反应:(1)壁上无效碰撞,(2)分解,(3)分子间无效碰撞和(4)合成。这些反应中使用的运算符指导从反应物溶液中获得合成溶液的方法。经典的反应算子可以参考Lam和Li(2010)。
基本反应模拟分子之间碰撞序列的发生,以获得其最低能量状态。不同条件下的碰撞导致不同的基本反应,每个反应可能具有不同的方式来操纵相关分子的能量。在CRO中,有四种类型的基本反应:(1)壁上无效碰撞,(2)分解,(3)分子间无效碰撞和(4)合成。这些反应中使用的运算符指导从反应物溶液中获得合成溶液的方法。经典的反应算子可以参考Lam和Li(2010)。
该文提出一种增强版的CRO,用于求解多车辆FFBRP,其算法框架与原CRO相同(见图2)。本节的其余部分将介绍算法细节,并进一步讨论原始 CRO 和增强型 CRO 之间实现细节的差异。
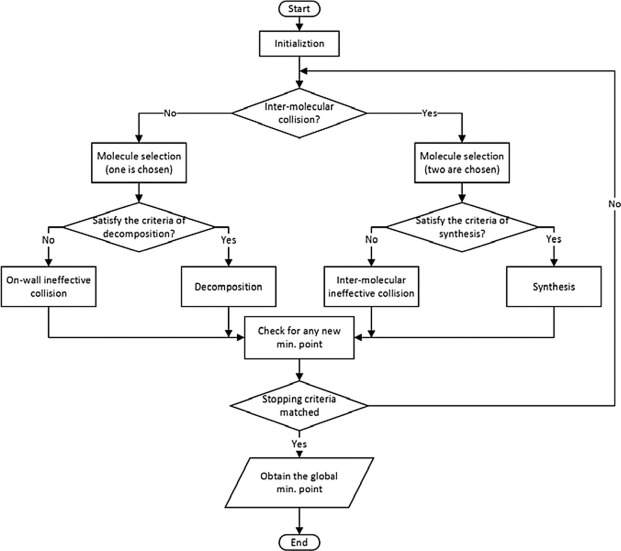
Fig. 2. Flow chart for both the original CRO and enhanced CRO (Lam and Li, 2010).
3.1. Solution representation
解由 ω = ( r , O ) \omega=(r,O) ω=(r,O)表示,其中 r r r 是是用于存储车辆路线的向量, O O O 每个访问节点的装卸数量的向量。假设 n k n_k nk是由 车辆 k k k 访问的节点总数(不包括起点和终点站),其中 k = 1 , 2 … , ∣ K ∣ k=1,2…,|K| k=1,2…,∣K∣ .车辆 k 访问的节点表示为 r h ∈ V 0 r^h∈V_0 rh∈V0 , h = ∑ k ′ = 1 k − 1 ( n k ′ + 2 ) + l , l = 0 , 1 , ⋯ , n k + 1 h=∑_{k′=1}^{k-1}(n'_k+2)+l , l=0,1,\cdots,n_k+1 h=∑k′=1k−1(nk′+2)+l,l=0,1,⋯,nk+1 因此 r = ( r h ) r=(r^h) r=(rh) 。假设车辆在仓库开始和结束重新定位。因此,仓库是车辆路线中的第一个和最后一个元素,(即 r h ∈ D ˉ r^h∈\bar{D} rh∈Dˉ ,where h = ∑ k ′ = 1 k − 1 ( n k ′ + 2 ) h=∑_{k′=1}^{k-1}(n'_k+2) h=∑k′=1k−1(nk′+2) or h = ∑ k ′ = 1 k − 1 ( n k ′ + 2 ) + n k + 1 ) h=∑_{k′=1}^{k-1}(n_k′+2)+n_k+1) h=∑k′=1k−1(nk′+2)+nk+1)。为了便于说明,在本节中,考虑了两个仓库,用 0 和 1 表示;车站从2开始编号。但是,将此表示形式推广到多个仓库方案很简单。
将图1中的路线写为解的形式:
- 车辆1:r=(0,1,2,3,0),O=(0,+10,=3,-7,0). n k = 3 n_k=3 nk=3
- 车辆2:r=(0,2,4,5,6,7,6,8,6,9),O=(+5,+7,-12,+1,-1,+1,-1,+1,-1,0). n k = 8 n_k=8 nk=8
O O O的元素定义为 O h = y ˉ h L − y ˉ h U O^h=\bar{y}_h^L-\bar{y}_h^U Oh=yˉhL−yˉhU ,其中 y ˉ h L \bar{y}_h^L yˉhL 和 y ˉ h U \bar{y}_h^U yˉhU分别表示节点 rh 处的装卸量。正整数表示加载操作,而负整数表示卸载操作。
请注意,第 2 节中介绍的公式是基于时间的,而我们的 CRO 中的解决方案表示是基于序列的。因此,我们用 h h h来表示车辆在解中访问的节点的位置,而不是时间索引$t4,用于推断访问顺序。根据订单,可以计算出每个节点的到达时间。因此,为了表示方便,有时会省略时间和车辆索引,即 t 和 k.
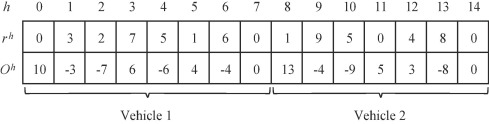 Fig. 3. Solution representation.
Fig. 3. Solution representation.
图 3 显示了由两辆可容纳 10 辆和 20 辆自行车的车辆执行重新定位操作的可行解决方案。在此示例中, n 1 = 6 n_1=6 n1=6 和 n 2 = 5 n_2=5 n2=5 ;车辆 1 在仓库 0 开始和结束重新定位,而车辆 2 与车辆 1 同时在仓库 1 开始,并在重新定位结束时返回仓库 0。
3.2. Nearby-node set
为了缩小搜索空间,加快搜索算法速度,该文提出了考虑问题特征的近节点集概念。定义为
Q
ˉ
ε
\bar{Q}_{\varepsilon}
Qˉε 为车辆
ε
∈
{
1
,
2
,
⋯
,
K
ˉ
}
\varepsilon\in \{1,2,\cdots,\bar{K}\}
ε∈{1,2,⋯,Kˉ}的容量,其中
K
ˉ
\bar{K}
Kˉ是车辆类型的数量。对于每辆车 k,其车辆类型表示为
ε
=
k
ˉ
k
\varepsilon=\bar{k}_k
ε=kˉk(例如,如果一个由 3 辆车组成的车队,其容量分别为
Q
1
=
10
,
Q
2
=
10
,
Q
3
=
20
Q_1=10,Q_2=10,Q_3=20
Q1=10,Q2=10,Q3=20,那么可推出以下结论,其容量的类型有
K
ˉ
=
2
\bar{K}=2
Kˉ=2,第一辆车的型号为
k
ˉ
1
=
1
\bar{k}_1=1
kˉ1=1,第二辆车的型号为
k
ˉ
2
=
1
\bar{k}_2=1
kˉ2=1,第三辆车的型号为
k
ˉ
3
=
2
\bar{k}_3=2
kˉ3=2,第一种类型的车的容量为
Q
ˉ
1
=
10
\bar{Q}_1=10
Qˉ1=10,第二种类型车的容量为
Q
ˉ
2
=
20.
\bar{Q}_2=20.
Qˉ2=20.) 然后,邻近节点集nearby-bode set
N
e
a
r
b
y
i
,
ε
(
i
∈
V
0
,
ε
∈
{
1
,
2
,
⋯
,
K
ˉ
)
Nearby_{i,\varepsilon}(i\in V_0,\varepsilon \in \{1,2,\cdots,\bar{K})
Nearbyi,ε(i∈V0,ε∈{1,2,⋯,Kˉ)可以被定义为
N
e
a
r
b
y
i
,
ε
=
{
j
∈
V
0
\
{
i
}
∣
γ
n
o
d
e
s
w
i
t
h
t
h
e
s
m
a
l
l
e
s
t
t
e
m
p
i
,
j
,
ε
}
Nearby_{i,\varepsilon}=\{j\in V_0 \backslash \{i\}|\gamma \ nodes \ with\ the \ smallest\ temp_{i,j,\varepsilon}\}
Nearbyi,ε={j∈V0\{i}∣γ nodes with the smallest tempi,j,ε},其中
t
e
m
p
i
,
j
,
ε
temp_{i,j,\varepsilon}
tempi,j,ε可以由下式计算:
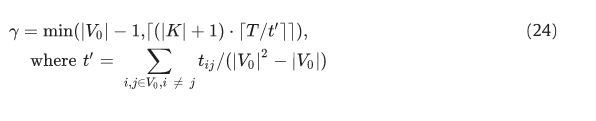
 γ
γ
γ的值由等式(24)确定.
⌈
T
∖
t
′
⌉
\lceil T\setminus t'\rceil
⌈T∖t′⌉表示车辆在重新定位持续时间 T 内可以访问的估计最大节点数,其中
t
′
t′
t′是 节点之间的平均行驶时间。由于装卸操作的服务时间计入时间约束(参考约束(15)),因此
⌈
T
∖
t
′
⌉
\lceil T\setminus t'\rceil
⌈T∖t′⌉足够大以进行估计。关于多车辆的情况,与传统 BRP 中的集合相比,
∣
K
∣
+
1
|K|+1
∣K∣+1 是否应用了因素,
⌈
T
∖
t
′
⌉
\lceil T\setminus t'\rceil
⌈T∖t′⌉而不是
∣
K
∣
|K|
∣K∣ 允许在我们的 FFBRP 集合中包含更多节点,因为节点
i
′
∈
V
H
i′∈V_H
i′∈VH所需的加载和卸载时间总是比节点
i
″
∈
D
ˉ
∪
V
E
i″∈\bar{D}∪VE
i″∈Dˉ∪VE 处的加载和卸载时间短。此外,$γ4 的值不应大于不包括所考虑的节点 i 的节点总数。
γ
γ
γ的值由等式(24)确定.
⌈
T
∖
t
′
⌉
\lceil T\setminus t'\rceil
⌈T∖t′⌉表示车辆在重新定位持续时间 T 内可以访问的估计最大节点数,其中
t
′
t′
t′是 节点之间的平均行驶时间。由于装卸操作的服务时间计入时间约束(参考约束(15)),因此
⌈
T
∖
t
′
⌉
\lceil T\setminus t'\rceil
⌈T∖t′⌉足够大以进行估计。关于多车辆的情况,与传统 BRP 中的集合相比,
∣
K
∣
+
1
|K|+1
∣K∣+1 是否应用了因素,
⌈
T
∖
t
′
⌉
\lceil T\setminus t'\rceil
⌈T∖t′⌉而不是
∣
K
∣
|K|
∣K∣ 允许在我们的 FFBRP 集合中包含更多节点,因为节点
i
′
∈
V
H
i′∈V_H
i′∈VH所需的加载和卸载时间总是比节点
i
″
∈
D
ˉ
∪
V
E
i″∈\bar{D}∪VE
i″∈Dˉ∪VE 处的加载和卸载时间短。此外,$γ4 的值不应大于不包括所考虑的节点 i 的节点总数。
3.3. Initial solution construction
为了描述如何获得初始解决方案,定义了以下表示法:
















 3118
3118











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









