






这篇论文在SLAM攻击论文:Perceptual Aliasing++中被引用了,被引用也没啥,最重要 作者是这样引用的:In our previous work, we proposed adversarial attack on handcrafted features [31].所以来读一下,根据这句推测是手工设计的特征在视觉SLAM中的对抗攻击。
摘要
对抗样本在CNN上效果显著,但是手工设计的特征很少在对抗样本中研究。本文我们就进行了这样的研究。对手工制作功能的像素级分析显示,简单的修改会大大降低其性能。这些扰动概括为不同的特征、视点和照明变化。本文在几个著名的算法上进行了广泛的实验。
1. 引言
作者引言第一句用了一个问句,在什么领域是深度特征表现不是最好的,令人意想不到的是,image registration竟然在这些领域中。也许缺乏适当的训练数据是这种异常滞后背后的原因,标记兴趣点比标记对象要tedious繁琐得多,例如,与整个数据集中的一千个对象实例相比,单个图像上可能有一千多个兴趣点。
近来对抗样本在欺骗深度系统上出现了很多工作。视觉里程估计是移动物体用到的基本方法,这种方法依赖手工特征,本文主要研究手工特征的对抗样本。
一个方法是了解对抗样本在DNN上的生成过程,关键是,DNN具有可导性,但是手工设计的特征是完全不可导的。兴趣点流程使用直接像素值,例如,边缘是两个相邻像素之间的简单差异。是否可以稍微修改像素并获得完全不同的兴趣点输出。
本文我们我们了像素级的见解,揭示了这些手工制作的管道的弱点。
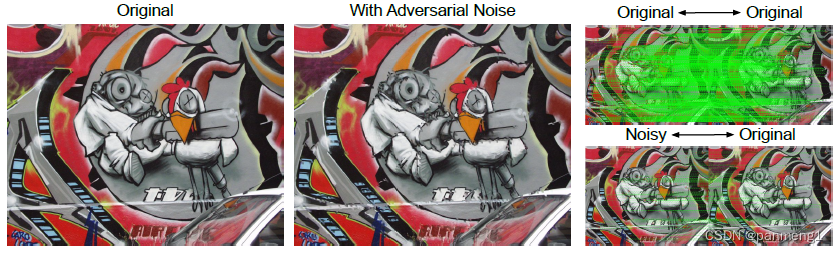
使用SURF匹配,原图可以获得1463个匹配,然而添加我们的对抗噪声后,只能得到116个匹配。
本文贡献:
- This work is the first attempt, to the best of our knowledge, to demonstrate adversarial examples for handcrafted features in context of natural scenes.
- 我们的对抗性噪声概括了不同的局部特征、视点和照明,并取得了不同程度的成功
- 在图像匹配,SLAM,sfm等几个任务上进行了测试,得到了不同程度的攻击成功率。
2. 相关工作
略
3. 像素级别上对于手工特征的观察
当一个特征被检测到并且它和周围的像素被添加扰动后,会如何影响手工特征呢。答案很tricky棘手,因为这一切都取决于被扰动的补丁周围的像素,特征有可能从原位置上完全消失,但是也有可能仍然被检测到。但是这并不表明扰动没有影响到特征。作者将攻击成功分为两种,一种是之前检测到,现在检测不到的特征,另外一种是现在依然能检测到,但是描述符匹配不上。检测到并且能匹配到的就是攻击不成功了。如下图所示: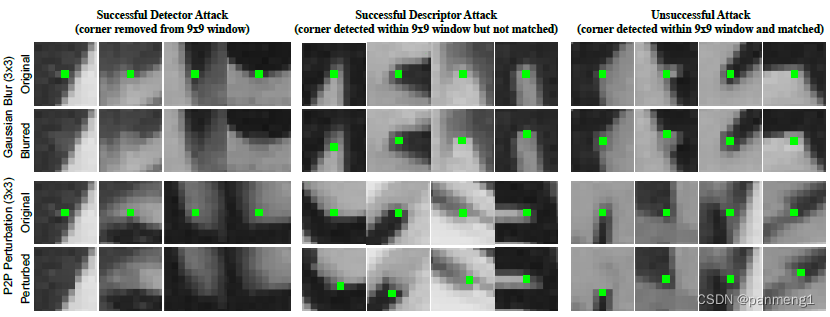
作者提到最好的攻击成功率在Harris角点检测上达到了99%。
4. 对抗噪声的建模
分为三组:高斯模糊,修复扰动,离散扰动。
4.1 高斯模糊
大部分手工特征都利用了图像的梯度,任何平滑滤波器都能干扰到局部的梯度和特征。我们选择了不同尺寸的高斯模糊和sigma值。实验表明,高斯模糊大大降低了图像质量,并且无法显著欺骗大多数特征。
4.2 修复扰动
使用修复图像孔洞的Image Inpainting 来生成对抗噪声。
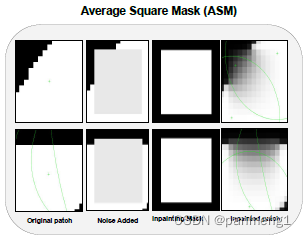
4.2.1 均方掩码扰动
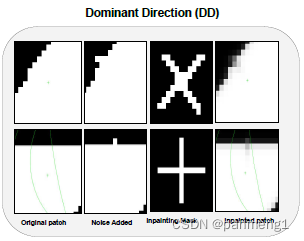
4.2.2 SURF主方向扰动
4.3 离散扰动
作者又设计了几种依赖局部平均的扰动,这种平均,显著地影响局部梯度同时保持了低失真。
4.3.1 pixel to pixel扰动
这种扰动的设计是为了影响patch中在特征周围的每个像素
p
i
,
j
=
p
i
,
j
−
1
+
p
i
−
1
,
j
2
p_{i,j}= \frac{p_{i,j-1}+p_{i-1,j}}{2}
pi,j=2pi,j−1+pi−1,j
4.3.2 Pixel-2-Pixel-Scattered (PPS) Perturbation
4.3.3 Block-2-Block (B2B) Perturbation
4.3.4 Scale-specific Perturbation for SURF
这几种扰动就不细看了,看看后面实验吧。
5. 实验
主要关注两个指标,一个是算法的退化效果,另外一个是图像质量的退化效果,使用SSIM和PSNR。指标越高代表不可感知性越强。Image registration使用HPatches 数据集,包含116个不同环境不同视角,光照的变化。视频任务上使用了TUM RGB-D数据集。作者仍然放出了代码,不得不说,巴基斯坦老铁们做事还是很地道的,最近读的两篇论文都有代码!
5.1 特征匹配上的效果
指标上使用了 percentage feature matching decline (PFMD):
P
F
M
D
=
M
o
o
−
M
o
p
M
o
o
PFMD= \frac{M_{oo}-M_{op}}{M_{oo}}
PFMD=MooMoo−Mop
M
o
o
M_{oo}
Moo为原匹配数,
M
o
p
M_{op}
Mop为后来的匹配数。表格略
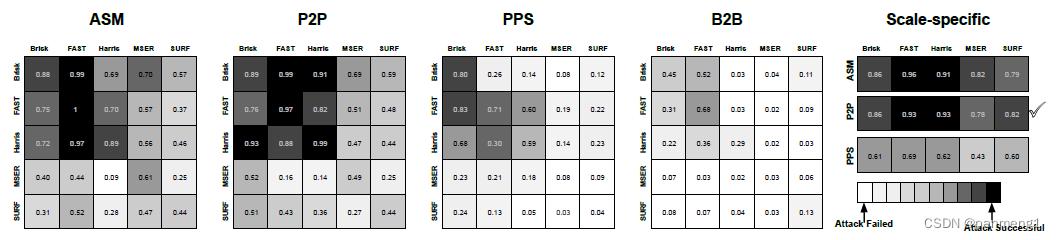
这个跨特征的攻击成功矩阵画的不错。
5.2 在SLAM,视觉里程估计和三维重建上的效果
有图有表,实验完备,不错


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









