







1. SIFT简介
SIFT(Scale-invariant feature transform 尺度不变特征变换)是一种传统的图像提取算法,由David G. Lowe于1999年发表,在修改完善后,2004年发表于IJCV上,论文名称是Distinctive Image Features from Scale-Invariant Keypoints,原文在这里。
SIFT算法是一种基于局部兴趣点的算法,对图像的尺度和图像的旋转不敏感,而且算法对光照、噪声等影响也具有较好的鲁棒性。
SIFT算法主要分为四个步骤:
1. 尺度空间极值检测 (scale-space extrema detection):通过使用高斯差分函数来搜索所有尺度上的图像位置,识别出其中对于尺度和方向不变的潜在兴趣点。
2. 关键点定位 (Keypoint localization):在每个候选位置上,利用一个拟合精细的模型确定位置和尺度,关键点的选择依赖于它们的稳定程度。
3. 方向匹配 (Orientation assignment,为每个关键点赋予方向):基于局部图像的梯度方向,为每个关键点位置分配一个或者多个方向,后续所有对图像数据的操作都是基于相对关键点的方向、尺度和位置进行变换,从而获得了方向与尺度的不变性。
4. 关键点描述符 (Keypoint descriptor):在每个关键点领域内,以选定的尺度计算局部图像梯度,这些梯度被变换成一种表示,这种表示允许比较大的局部形状的变形和光照变化。
2. 尺度空间极值检测
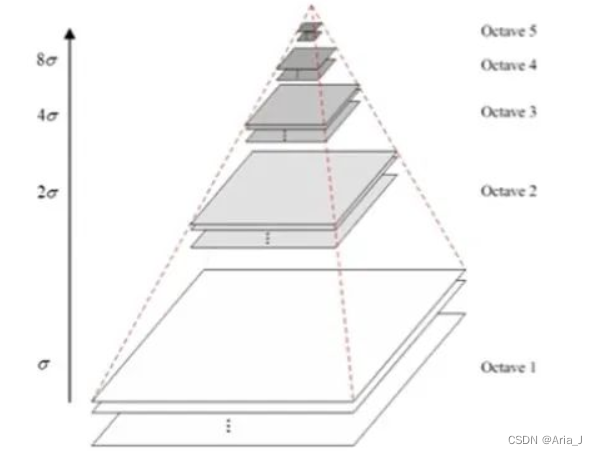
利用高斯核构建高斯金字塔,每个尺度层包含一组尺度的图像。这里不同组的特征金字塔的获取采用隔点取样获得。
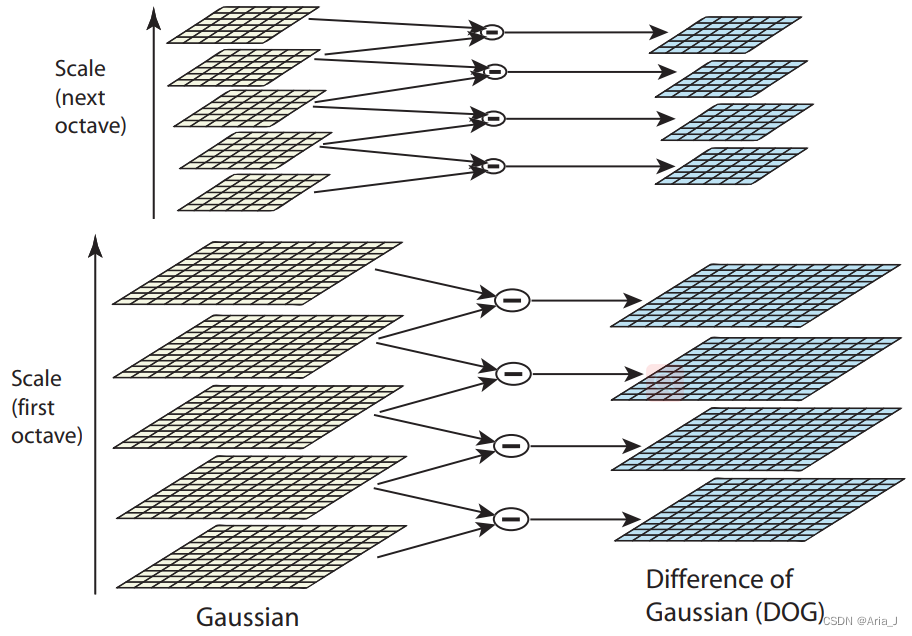
在每个组内(octave)两两做差,构建高斯差分金字塔。
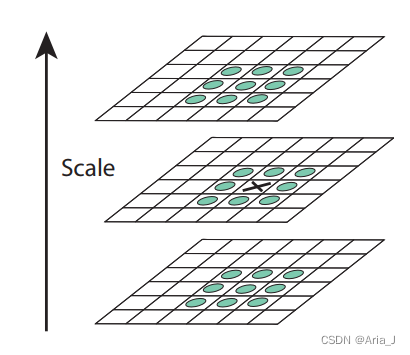
在高斯差分金字塔中,每个的立方体,比较中心点与其他的26个点的大小,如果中心点最大或者最小,那么这个中心点就是极值点。
s表示我们要在高斯差分金字塔中求得的特征层的数目,那么需要s+2层的高斯差分金字塔,需要s+3层的高斯金字塔。因此每组的octave中需要s+3层图像。
3. 关键点定位
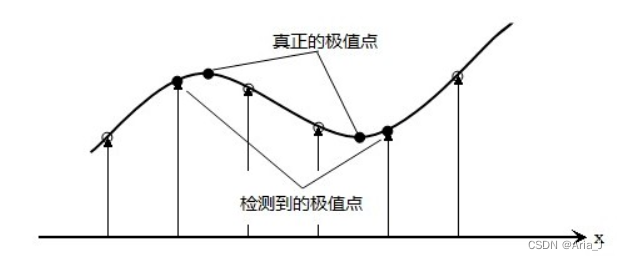
上边的步骤所检测到的极值点是离散空间的极值点,这些极值点并不是十分准确,我们需要来精确确定关键点的位置和尺度,同时去除低对比度的关键点和不稳定的边缘点(因为DoG算子会产生较强的边缘响应),从而增强稳定性。
离散空间的极值点并不是真正的极值点,正如下图所示,利用离散空间的极值点的插值可以得到连续空间的极值点。
因此,这里对于图像极值点进行二阶泰勒展开近似
求导,让其为0,求得连续空间的极值点:
将极值点代入上述泰勒近似公式,得到在极值点位置的值:
由此,即可得到真正的连续空间的极值点。
然后去除低对比度以及边缘效应的极值点,就得到最终需要保留的所有极值点。
边缘效应的去除, 采用Hassian阵的特征值,Hassian阵实际为二阶偏导数。在高斯差分图像中,如果是边缘特征点,那么其垂直于边缘的方向,值变化较大(对应于Hassian阵中较大的特征值),沿边缘方向,值变化较小(对应于Hassian阵中较小的特征值)。因此采用Hassian阵中的较大特征值与较小特征值的比例超过阈值的特征点去除,就去除了边缘效应。
测试结果为

a图是原图像,b图是直接进行关键点检测得到的效果图,c图是舍弃对比度较小的极值点得到的效果图。d图是去除边缘效应极值点后得到的效果图。
4. 方向匹配
对于每个极值点,统计以该特征点所在的高斯图像的尺度的1.5倍为半径的圆内的所有像素的梯度方向及其梯度幅值。得到下图所示的直方图(论文中以每10度为一个范围,也就是有36个方向)。直方图峰值所对应的方向为主方向,任何大于峰值80%的方向为特征点的辅方向。

5. 关键点描述符
前边三个步骤,我们找到了所有的特征点的位置,并且每个特征点都有方向,尺度信息。接下来就是计算在局部区域内这些特征点的描述符。
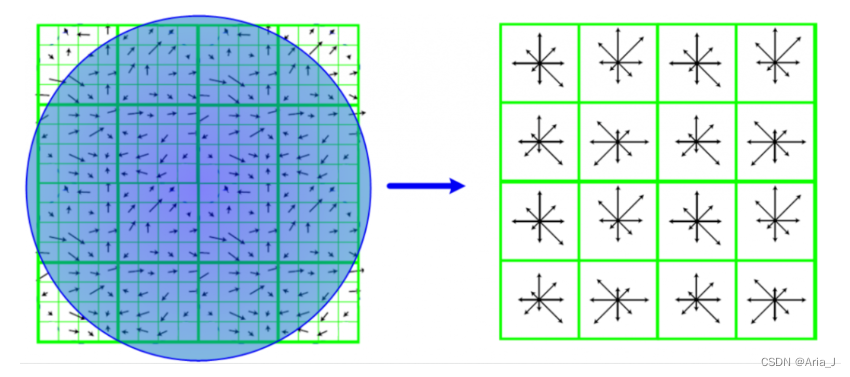
如下图,左边是图像梯度图像,右边是关键点描述符。描述符与特征点所在的尺度图像有关,因此在某个高斯尺度图像上,以特征点为圆心,将其附近邻域划分为个子区域,每个区域统计特征点的方向以及尺度,每个子区域获得8个方向的梯度信息,因此每个特征点共有
维的特征。















 9777
9777











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









