







一、线性变换的概念
当一个矩阵
A
A
A 乘一个向量
v
\boldsymbol v
v 时,它将
v
\boldsymbol v
v “变换” 成另一个向量
A
v
A\boldsymbol v
Av. 输入
v
\boldsymbol v
v,输出
T
(
v
)
=
A
v
T(\boldsymbol v)=A\boldsymbol v
T(v)=Av. 变换
T
T
T 和函数类似:对于函数,输入数字
x
x
x,输出
f
(
x
)
f(x)
f(x);对于变换,输入一个向量
v
\boldsymbol v
v,我们用矩阵左乘这个向量,输出
T
(
v
)
T(\boldsymbol v)
T(v). 我们更深入的目标是所有向量
v
\boldsymbol v
v 的变换,当我们用矩阵
A
A
A 左乘每个向量
v
\boldsymbol v
v 时,我们是在变换整个空间
V
V
V.
先从矩阵
A
A
A 开始,它将
v
\boldsymbol v
v 变换成
A
v
A\boldsymbol v
Av,将
w
\boldsymbol w
w 变换成
A
w
A\boldsymbol w
Aw,当
u
=
v
+
w
\boldsymbol u=\boldsymbol v+\boldsymbol w
u=v+w 时,我们得到
A
u
A\boldsymbol u
Au 等于
A
v
+
A
w
A\boldsymbol v+A\boldsymbol w
Av+Aw. 矩阵乘法
T
(
v
)
=
A
v
T(\boldsymbol v)=A\boldsymbol v
T(v)=Av 给出了一个线性变换(linear transformation):
一个 变换 T 对于每个输入的向量 v 都对应一个输出 T ( v ) . 如果对于所有的 v 和 w 都满足如下条件,则这个变换是 线性 的: ( a ) T ( v + w ) = T ( v ) + T ( w ) ( b ) 对于任意的 c 都有 : T ( c v ) = c T ( v ) 一个\,\pmb{变换\,T}\,对于每个输入的向量\,\boldsymbol v\,都对应一个输出\,T(\boldsymbol v).\,\\如果对于所有的\,\boldsymbol v\,和\,\boldsymbol w\,都满足如下条件,则这个变换是\pmb{线性}的:\\\,\\\color{blue}(a)\kern 5ptT(\boldsymbol v+\boldsymbol w)=T(\boldsymbol v)+T(\boldsymbol w)\kern 15pt(b)\kern 5pt对于任意的\,c\,都有:\,T(c\boldsymbol v)=cT(\boldsymbol v) 一个变换T对于每个输入的向量v都对应一个输出T(v).如果对于所有的v和w都满足如下条件,则这个变换是线性的:(a)T(v+w)=T(v)+T(w)(b)对于任意的c都有:T(cv)=cT(v)
由上述定义可知,如果输入 v = 0 \boldsymbol v=\boldsymbol 0 v=0,则输出一定是 T ( v ) = 0 T(\boldsymbol v)=\boldsymbol 0 T(v)=0,我们可以将条件(a)和(b)合并成一个条件:
线性变换 T ( c v + d w ) = c T ( v ) + d T ( w ) \pmb{线性变换}\kern 30pt\color{blue}T(c\boldsymbol v+d\boldsymbol w)=cT(\boldsymbol v)+dT(\boldsymbol w) 线性变换T(cv+dw)=cT(v)+dT(w)
我们可以验证矩阵的乘法是线性的:
A
(
c
v
+
d
w
)
=
c
A
v
+
d
A
w
A(c\boldsymbol v+d\boldsymbol w)=cA\boldsymbol v+dA\boldsymbol w
A(cv+dw)=cAv+dAw.
线性变换的限制很强。假设变换
T
T
T 是对任意向量加上一个非零向量
u
0
\boldsymbol u_0
u0,则
T
(
v
)
=
v
+
u
0
,
T
(
w
)
=
w
+
u
0
T(\boldsymbol v)=\boldsymbol v+\boldsymbol u_0,\,T(\boldsymbol w)=\boldsymbol w+\boldsymbol u_0
T(v)=v+u0,T(w)=w+u0,这个就不算线性的,我们对
v
+
w
\boldsymbol v+\boldsymbol w
v+w 作变换
T
T
T 会得到
v
+
w
+
u
0
\boldsymbol v+\boldsymbol w+\boldsymbol u_0
v+w+u0,它并不等于
T
(
v
)
+
T
(
w
)
T(\boldsymbol v)+T(\boldsymbol w)
T(v)+T(w):
平移不是线性的
v
+
w
+
u
0
不等于
T
(
v
)
+
T
(
w
)
=
(
v
+
u
0
)
+
(
w
+
u
0
)
\pmb{平移不是线性的}\kern 15pt\boldsymbol v+\boldsymbol w+\boldsymbol u_0\kern 5pt不等于\kern 5ptT(\boldsymbol v)+T(\boldsymbol w)=(\boldsymbol v+\boldsymbol u_0)+(\boldsymbol w+\boldsymbol u_0)
平移不是线性的v+w+u0不等于T(v)+T(w)=(v+u0)+(w+u0)只有当
u
0
=
0
\boldsymbol u_0=\boldsymbol 0
u0=0 时才是线性的,此时这个变换简化为
T
(
v
)
=
v
T(\boldsymbol v)=\boldsymbol v
T(v)=v,这个是恒等变换(identity transformation,没有任何变换,就如单位矩阵左乘向量一样)。这个当然是线性的,这种情况输入空间
V
\pmb{\textrm V}
V 和输出空间
W
\textrm{\pmb W}
W 是完全一样的。
“线性 + 平移(linear-plus-shift)” 变换
T
(
v
)
=
A
v
+
u
0
T(\boldsymbol v)=A\boldsymbol v+\boldsymbol u_0
T(v)=Av+u0 称为 “仿射的(affine)”,尽管此时
T
T
T 不是线性的,但是直线变换后仍为直线。移动计算机图形时,就可以使用仿射变换。
【例1】选择一个固定的向量 a = ( 1 , 3 , 4 ) \boldsymbol a=(1,3,4) a=(1,3,4),令 T ( v ) T(\boldsymbol v) T(v) 是点积 a ⋅ v \boldsymbol a\cdot\boldsymbol v a⋅v:
输入是
v
=
(
v
1
,
v
2
,
v
3
)
,
输出是
T
(
v
)
=
a
⋅
v
=
v
1
+
3
v
2
+
4
v
3
\boxed{输入是\,\boldsymbol v=(v_1,v_2,v_3),\kern 20pt输出是\,T(\boldsymbol v)=\boldsymbol a\cdot\boldsymbol v=v_1+3v_2+4v_3}
输入是v=(v1,v2,v3),输出是T(v)=a⋅v=v1+3v2+4v3点积是线性的。输入
v
\boldsymbol v
v 来自于三维空间,所以
V
=
R
3
\textrm{\pmb V}=\textrm{\pmb{R}}^3
V=R3. 输出只是数字,所以输出空间是
W
=
R
1
\textrm{\pmb W}=\textrm{\pmb R}^1
W=R1. 这个就相当于用行矩阵
A
=
[
1
3
4
]
A=\begin{bmatrix}1&3&4\end{bmatrix}
A=[134] 左乘
v
\boldsymbol v
v,即
T
(
v
)
=
A
v
T(\boldsymbol v)=A\boldsymbol v
T(v)=Av.
现在我们能够很好的判断哪些变换是线性的了,如果输出包含平方、乘积或长度,
v
1
2
,
v
1
v
2
v_1^2,v_1v_2
v12,v1v2 或
∣
∣
v
∣
∣
||\boldsymbol v||
∣∣v∣∣,则
T
T
T 就不是线性的。
【例2】长度
T
(
v
)
=
∣
∣
v
∣
∣
T(\boldsymbol v)=||\boldsymbol v||
T(v)=∣∣v∣∣ 不是线性的。线性条件(a)要求
∣
∣
v
+
w
∣
∣
=
∣
∣
v
∣
∣
+
∣
∣
w
∣
∣
||\boldsymbol v+\boldsymbol w||=||\boldsymbol v||+||\boldsymbol w||
∣∣v+w∣∣=∣∣v∣∣+∣∣w∣∣,条件(b)要求
∣
∣
c
v
∣
∣
=
c
∣
∣
v
∣
∣
||c\boldsymbol v||=c||\boldsymbol v||
∣∣cv∣∣=c∣∣v∣∣. 这两个条件均不满足!
条件(a)不成立:三角形的边满足三角不等式
∣
∣
v
+
w
∣
∣
≤
∣
∣
v
∣
∣
+
∣
∣
w
∣
∣
||\boldsymbol v+\boldsymbol w||\le||\boldsymbol v||+||\boldsymbol w||
∣∣v+w∣∣≤∣∣v∣∣+∣∣w∣∣.
条件(b)不成立:长度
∣
∣
−
v
∣
∣
||-\boldsymbol v||
∣∣−v∣∣ 是
∣
∣
v
∣
∣
||\boldsymbol v||
∣∣v∣∣ 而不是
−
∣
∣
v
∣
∣
-||\boldsymbol v||
−∣∣v∣∣. 对于负数
c
c
c,线性不成立。
【例3】(旋转)
T
T
T 是将每个向量逆时针旋转
30
°
30°
30° 的变换,
T
T
T 的 “定义域(domain)” 是
x
y
xy
xy 平面(所有的输入向量
v
\boldsymbol v
v),
T
T
T 的 “值域(range)” 也是
x
y
xy
xy 平面(所有旋转了的向量
T
(
v
)
T(\boldsymbol v)
T(v))。我们不适用矩阵来描述就是:平面逆时针旋转
30
°
30°
30°.
旋转变换是线性的吗?答案是肯定的。我们可以将两个向量旋转后相加,旋转后的向量之和
T
(
v
)
+
T
(
w
)
T(\boldsymbol v)+T(\boldsymbol w)
T(v)+T(w) 等于向量和的旋转
T
(
v
+
w
)
T(\boldsymbol v+\boldsymbol w)
T(v+w). 在这个线性变换中,整个平面一起旋转。
二、线到线、三角形到三角形、基决定一切
Figure 8.1 展示了输入空间中从
v
\boldsymbol v
v 到
w
\boldsymbol w
w 的直线,也展示了输出空间中从
T
(
v
)
T(\boldsymbol v)
T(v) 到
T
(
w
)
T(\boldsymbol w)
T(w) 的直线。线性告诉我们:输入直线上的每一个点都映射到输出直线上;进一步地是:等间距的点映射为等间距的点。中点
u
=
1
2
v
+
1
2
w
\boldsymbol u=\displaystyle\frac{1}{2}\boldsymbol v+\frac{1}{2}\boldsymbol w
u=21v+21w 映射为中点
T
(
u
)
=
1
2
T
(
v
)
+
1
2
T
(
w
)
T(\boldsymbol u)=\displaystyle\frac{1}{2}T(\boldsymbol v)+\frac{1}{2}T(\boldsymbol w)
T(u)=21T(v)+21T(w).
另一个图上升一个维度,现在我们有三个顶点
v
1
,
v
2
,
v
3
\boldsymbol v_1,\boldsymbol v_2,\boldsymbol v_3
v1,v2,v3,这些输入有三个输出
T
(
v
1
)
,
T
(
v
2
)
,
T
(
v
3
)
T(\boldsymbol v_1),T(\boldsymbol v_2),T(\boldsymbol v_3)
T(v1),T(v2),T(v3),输入三角形映射为输出三角形,等间距的点仍然保持等间距(沿着边的和不在边上的都是如此),重心
u
=
1
3
(
v
1
+
v
2
+
v
3
)
\boldsymbol u=\displaystyle\frac{1}{3}(\boldsymbol v_1+\boldsymbol v_2+\boldsymbol v_3)
u=31(v1+v2+v3) 映射为重心
T
(
u
)
=
1
3
(
T
(
v
1
)
+
T
(
v
2
)
+
T
(
v
3
)
)
T(\boldsymbol u)=\displaystyle\frac{1}{3}(T(\boldsymbol v_1)+T(\boldsymbol v_2)+T(\boldsymbol v_3))
T(u)=31(T(v1)+T(v2)+T(v3)).

线性性质可以扩展到三个向量或
n
个向量的组合:
\color{blue}线性性质可以扩展到三个向量或\,n\,个向量的组合:
线性性质可以扩展到三个向量或n个向量的组合:
线性的 u = c 1 v 1 + c 2 v 2 + ⋯ + c n v n 一定是变换为 T ( u ) = c 1 T ( v 1 ) + c 2 T ( v 2 ) + ⋯ + c n T ( v n ) ( 8.1.1 ) \begin{array}{c}\pmb{线性的}\kern 15pt{\color{blue}\boldsymbol u=c_1\boldsymbol v_1+c_2\boldsymbol v_2+\cdots+c_n\boldsymbol v_n}\kern 15pt\pmb{一定是变换为}\\\\{\color{blue}T(\boldsymbol u)=c_1T(\boldsymbol v_1)+c_2T(\boldsymbol v_2)+\cdots+c_nT(\boldsymbol v_n)}\end{array}\kern 20pt(8.1.1) 线性的u=c1v1+c2v2+⋯+cnvn一定是变换为T(u)=c1T(v1)+c2T(v2)+⋯+cnT(vn)(8.1.1)
由
2
2
2 个向量的性质得到推出
3
3
3 个向量情形的证明:
T
(
c
u
+
d
v
+
e
w
)
=
T
(
c
u
)
+
d
T
(
d
v
+
e
w
)
T(c\boldsymbol u+d\boldsymbol v+e\boldsymbol w)=T(c\boldsymbol u)+dT(d\boldsymbol v+e\boldsymbol w)
T(cu+dv+ew)=T(cu)+dT(dv+ew),然后对右边的这些项继续应用线性性质,可以得到
c
T
(
u
)
+
d
T
(
v
)
+
e
T
(
w
)
cT(\boldsymbol u)+dT(\boldsymbol v)+eT(\boldsymbol w)
cT(u)+dT(v)+eT(w).
n
n
n 个向量的规则(8.1.1)给出线性变换最重要的性质:`
假设知道了一组基 v 1 , v 2 , ⋯ , v 3 \boldsymbol v_1,\boldsymbol v_2,\cdots,\boldsymbol v_3 v1,v2,⋯,v3 的全部变换 T ( v ) T(\boldsymbol v) T(v),那么就知道了这个空间中任意向量 u \boldsymbol u u 的变换 T ( u ) T(\boldsymbol u) T(u).
理由是:空间中的任意向量 u \boldsymbol u u 均是基向量 v j \boldsymbol v_j vj 的线性组合,由线性性质可知, T ( u ) T(\boldsymbol u) T(u) 是输出 T ( v j ) T(\boldsymbol v_j) T(vj) 同样系数的线性组合。
【例4】变换
T
T
T 是求输入的导数:
T
(
u
)
=
d
u
d
x
T(u)=\displaystyle\frac{\textrm du}{\textrm dx}
T(u)=dxdu. 如何求
u
=
6
−
4
x
+
3
x
2
u=6-4x+3x^2
u=6−4x+3x2 的导数?我们先从
1
,
x
1,x
1,x 和
x
2
x^2
x2 的导数开始,这些就是基向量,它们的导数分别是
0
,
1
0,1
0,1 和
2
x
2x
2x,那么可以使用线性性质求基向量任意线性组合的导数:
d
u
d
x
=
6
(
1
的导数
)
−
4
(
x
的导数
)
+
3
(
x
2
的导数
)
=
−
4
+
6
x
\frac{\textrm du}{\textrm dx}=6(1\,的导数)-4(x\,的导数)+3(x^2\,的导数)=-4+6x
dxdu=6(1的导数)−4(x的导数)+3(x2的导数)=−4+6x微积分的内容都是基于线性性质的!微积分基础是先求出基本初等函数的导数,如
x
n
,
sin
x
,
cos
x
x^n,\sin x,\cos x
xn,sinx,cosx 和
e
x
e^x
ex,然后再对它们所有的组合使用线性性质。
微积分中唯一特殊的法则是链式法则(chain rule),链式法则给出了复合函数
f
(
g
(
x
)
)
f(g(x))
f(g(x)) 的导数。
T
(
u
)
=
d
u
d
x
T(u)=\displaystyle\frac{\textrm du}{\textrm dx}
T(u)=dxdu 的零空间:要得到零空间我们需要求解
T
(
u
)
=
0
T(u)=0
T(u)=0. 当且仅当
u
u
u 是一个常数函数时其导数为零。所以零空间是一维的,它是函数空间中的一条线 —— 包含特解
u
=
1
u=1
u=1 所有的倍数。
T
(
u
)
=
d
u
d
x
T(u)=\displaystyle\frac{\textrm du}{\textrm dx}
T(u)=dxdu 的列空间:该例中输入空间包含所有的二次函数
a
+
b
x
+
c
x
2
a+bx+cx^2
a+bx+cx2,输出空间(列空间)是所有的线性函数
b
+
2
c
x
b+2cx
b+2cx. 注意计数定理
r
+
(
n
−
r
)
=
n
\pmb{r+(n-r)=n}
r+(n−r)=n 仍然成立。
维数
(
列空间
)
+
维数
(
零空间
)
=
2
+
1
=
3
=
维数
(
输入空间
)
维数(\pmb{列空间})+维数(\pmb{零空间})=\pmb{2+1=3}=维数(\pmb{输入空间})
维数(列空间)+维数(零空间)=2+1=3=维数(输入空间)求导
d
d
x
\displaystyle\frac{\textrm d}{\textrm dx}
dxd 对应的矩阵是什么?对于线性变换
T
=
d
d
x
T=\displaystyle\frac{\textrm d}{\textrm dx}
T=dxd,我们知道
T
T
T 对基函数的作用:
v
1
,
v
2
,
v
3
=
1
,
x
,
x
2
d
v
1
d
x
=
0
d
v
2
d
x
=
1
=
v
1
d
v
3
d
x
=
2
x
=
2
v
2
(
8.1.2
)
\boldsymbol v_1,\boldsymbol v_2,\boldsymbol v_3=\pmb{1,x,x^2}\kern 20pt\frac{\textrm d\boldsymbol v_1}{\textrm dx}=\boldsymbol 0\kern 20pt\frac{\textrm d\boldsymbol v_2}{\textrm dx}=1=\boldsymbol v_1\kern 20pt\frac{\textrm d\boldsymbol v_3}{\textrm dx}=2x=\pmb{2 v_2}\kern 18pt(8.1.2)
v1,v2,v3=1,x,x2dxdv1=0dxdv2=1=v1dxdv3=2x=2v2(8.1.2)三维的输入空间
V
\pmb{\textrm V}
V(二次函数)变换到二维的输出空间
W
\textrm{\pmb W}
W(线性函数)。如果将
v
1
,
v
2
,
v
3
\boldsymbol v_1,\boldsymbol v_2,\boldsymbol v_3
v1,v2,v3 当做向量,就可以得到变换矩阵
A
=
[
0
1
0
0
0
2
]
是求导变换
T
=
d
d
x
的变换矩阵
(
8.1.3
)
\boxed{\pmb A=\begin{bmatrix}0&\pmb1&0\\0&0&\pmb2\end{bmatrix}是求导变换\,T=\frac{\textrm d}{\textrm dx}\,的变换矩阵}\kern 25pt(8.1.3)
A=[001002]是求导变换T=dxd的变换矩阵(8.1.3)线性变换
d
u
d
x
\displaystyle\frac{\textrm du}{\textrm dx}
dxdu 可以完美的由矩阵的乘法
A
u
A\boldsymbol u
Au 来解释。
输入
u
a
+
b
x
+
c
x
2
乘积
A
u
=
[
0
1
0
0
0
2
]
[
a
b
c
]
=
[
b
2
c
]
输出
d
u
d
x
=
b
+
2
c
x
\begin{array}{l}\pmb{输入}\,\boldsymbol u\\a+bx+cx^2\end{array}\begin{array}{c}\pmb{乘积}\,A\boldsymbol u=\begin{bmatrix}0&1&0\\0&0&2\end{bmatrix}\begin{bmatrix}a\\b\\c\end{bmatrix}=\begin{bmatrix}b\\2c\end{bmatrix}&\pmb{输出\,\displaystyle\frac{\textrm du}{\textrm dx}}=b+2cx\end{array}
输入ua+bx+cx2乘积Au=[001002]
abc
=[b2c]输出dxdu=b+2cx
T
T
T 和
A
A
A 之间的联系(我们可以对每个线性变换都确定一个变换矩阵)依赖于输入基
1
,
x
,
x
2
1,x,x^2
1,x,x2 和输出基
1
,
x
1,x
1,x 的选取。
下面看积分,它们给出导数的伪逆
T
+
T^+
T+ ! 这里不能写成
T
−
1
T^{-1}
T−1,那么也不能说 “
T
T
T 的逆 ”,因为所有常数函数的导数都是
0
0
0,这是多对一的情况。
【例5】积分
T
+
T^+
T+ 也是线性的:
∫
0
x
(
D
+
E
x
)
d
x
=
D
x
+
1
2
E
x
2
\int_0^x(D+Ex)\,\textrm dx=Dx+\displaystyle\frac{1}{2}Ex^2
∫0x(D+Ex)dx=Dx+21Ex2.
现在输入基是
1
,
x
1,x
1,x,输出基是
1
,
x
,
x
2
1,x,x^2
1,x,x2,
T
+
T^+
T+ 对应的矩阵
A
+
A^+
A+ 是
3
×
2
3\times2
3×2 的:
输入
v
D
+
E
x
乘积
A
+
v
=
[
0
0
1
0
0
1
/
2
]
[
D
E
]
=
[
0
D
1
2
E
]
输出
v
的积分
T
+
(
v
)
=
D
x
+
1
2
E
x
2
\begin{array}{l}\pmb{输入\,v}\\D+Ex\end{array}\kern 10pt\pmb{乘积}\,A^+\boldsymbol v=\begin{bmatrix}0&0\\1&0\\0&1/2\end{bmatrix}\begin{bmatrix}D\\E\end{bmatrix}=\begin{bmatrix}\pmb0\\\pmb D\\\pmb{\displaystyle\frac{1}{2}E}\end{bmatrix}\kern 5pt\begin{array}{l}\pmb{输出\,v\,的积分}\\T^+(\boldsymbol v)=Dx+\displaystyle\frac{1}{2}Ex^2\end{array}
输入vD+Ex乘积A+v=
010001/2
[DE]=
0D21E
输出v的积分T+(v)=Dx+21Ex2微积分基本定理指出:积分是微分的(伪)逆。从线性代数来看,矩阵
A
+
A^+
A+ 是矩阵
A
A
A 的伪逆:
A
+
A
=
[
0
0
1
0
0
1
/
2
]
[
0
1
0
0
0
2
]
=
[
0
0
0
0
1
0
0
0
1
]
A
A
+
=
[
1
0
0
1
]
(
8.1.4
)
A^+A=\begin{bmatrix}0&0\\1&0\\0&1/2\end{bmatrix}\begin{bmatrix}0&1&0\\0&0&2\end{bmatrix}=\begin{bmatrix}\pmb0&0&0\\0&\pmb1&0\\0&0&\pmb1\end{bmatrix}\kern 15ptAA^+=\begin{bmatrix}\pmb1&0\\0&\pmb1\end{bmatrix}\kern 19pt(8.1.4)
A+A=
010001/2
[001002]=
000010001
AA+=[1001](8.1.4)常数函数的导数是零,零在
A
+
A
A^+A
A+A 的对角线上。如果
T
=
d
d
x
T=\displaystyle\frac{\textrm d}{\textrm dx}
T=dxd 没有一维的零空间,则微积分就不是微积分了(不再完整)。
三、变换的例子(大部分是线性的)
【例6】将任意三维向量投影到水平面 z = 1 z=1 z=1 上:向量 v = ( x , y , z ) \boldsymbol v=(x,y,z) v=(x,y,z) 变换为 T ( v ) = ( x , y , 1 ) T(\boldsymbol v)=(x,y,1) T(v)=(x,y,1). 这个向量不是线性的。为什么呢?因为 v = 0 \boldsymbol v=\boldsymbol 0 v=0 甚至没有变换为 T ( v ) = 0 T(\boldsymbol v)=\boldsymbol 0 T(v)=0.
【例7】假设
A
A
A 是一个可逆矩阵,则有
T
(
v
+
w
)
=
A
v
+
A
w
=
T
(
v
)
+
T
(
w
)
T(\boldsymbol v+\boldsymbol w)=A\boldsymbol v+A\boldsymbol w=T(\boldsymbol v)+T(\boldsymbol w)
T(v+w)=Av+Aw=T(v)+T(w). 另一个线性变换是用
A
−
1
A^{-1}
A−1 左乘,这个给出了逆变换(inverse transformation)
T
−
1
T^{-1}
T−1,它将每个向量
T
(
v
)
T(\boldsymbol v)
T(v) 变换回
v
\boldsymbol v
v:
T
−
1
(
T
(
v
)
)
=
v
对应矩阵的乘积
A
−
1
(
A
v
)
=
v
T^{-1}(T(\boldsymbol v))=\boldsymbol v\kern 18pt对应矩阵的乘积\kern 19ptA^{-1}(A\boldsymbol v)=\boldsymbol v
T−1(T(v))=v对应矩阵的乘积A−1(Av)=v如果
T
(
v
)
=
A
v
,
S
(
u
)
=
B
u
T(\boldsymbol v)=A\boldsymbol v,S(\boldsymbol u)=B\boldsymbol u
T(v)=Av,S(u)=Bu,则乘积
T
(
S
(
u
)
)
T(S(\boldsymbol u))
T(S(u)) 对应乘积
A
B
u
AB\boldsymbol u
ABu.
下面讨论一个无可避免的问题:所有的从
V
=
R
n
\textrm{\pmb{V}}={\textrm {\pmb R}}^n
V=Rn 到
W
=
R
m
\pmb {\textrm W}=\pmb{\textrm R}^m
W=Rm 的线性变换都可以由矩阵给出吗? 当线性的
T
T
T 是 “旋转” “投影” 或其它的变换,
T
T
T 总是有对应的矩阵
A
A
A 吗?
T
(
v
)
T(\boldsymbol v)
T(v) 总是
A
v
A\boldsymbol v
Av 吗?
答案是肯定的!这是不从矩阵开始的线性代数的一种方法。在我们选择好一组输入基和输出基后,我们可以通过矩阵来描述线性变换。
注: 变换有自己的语言。从矩阵角度来看线性变换
T
(
v
)
=
A
v
T(\boldsymbol v)=A\boldsymbol v
T(v)=Av,矩阵
A
A
A 的列空间包含所有的输出
A
v
A\boldsymbol v
Av,零空间包含所有的使
A
v
=
0
A\boldsymbol v=\boldsymbol 0
Av=0 时的输入;在变换语言中,这些对应的分别是 “值域(range)” 与 “核(kernel)”:
T
的值域:
\color{blue}T\,的值域:
T的值域: 所有的输出
T
(
v
)
T(\boldsymbol v)
T(v). 值域对应列空间。
T
的核:
\color{blue}T\,的核:
T的核:所有使得
T
(
v
)
=
0
T(\boldsymbol v)=\boldsymbol 0
T(v)=0 的输入. 核对应零空间。
值域在输出空间
W
\textrm {\pmb W}
W 中,核在输入空间
V
\textrm{\pmb V}
V 中,当
T
T
T 是用一个矩阵左乘,即
T
(
v
)
=
A
v
T(\boldsymbol v)=A\boldsymbol v
T(v)=Av 时,值域是列空间,核是零空间。
四、平面的线性变换
观察线性变换的作用比起定义它要更有趣。当一个
2
×
2
2\times2
2×2 的矩阵
A
A
A 左乘
R
2
\textrm{\pmb R}^2
R2 中的所有向量时,我们可以观察它是如何作用的。我们下面以一个有
11
11
11 个顶点的 “房子” 为例,这
11
11
11 个向量
v
\boldsymbol v
v 变换成
11
11
11 个向量
A
v
A\boldsymbol v
Av,连接
v
\boldsymbol v
v 的直线变换成了连接
A
v
A\boldsymbol v
Av 的直线(从房子到房子的变换是线性的!)。对一个标准的房子应用
A
A
A 会产生一个新房子 —— 可能伸缩或旋转或其它的不适合居住的房子。
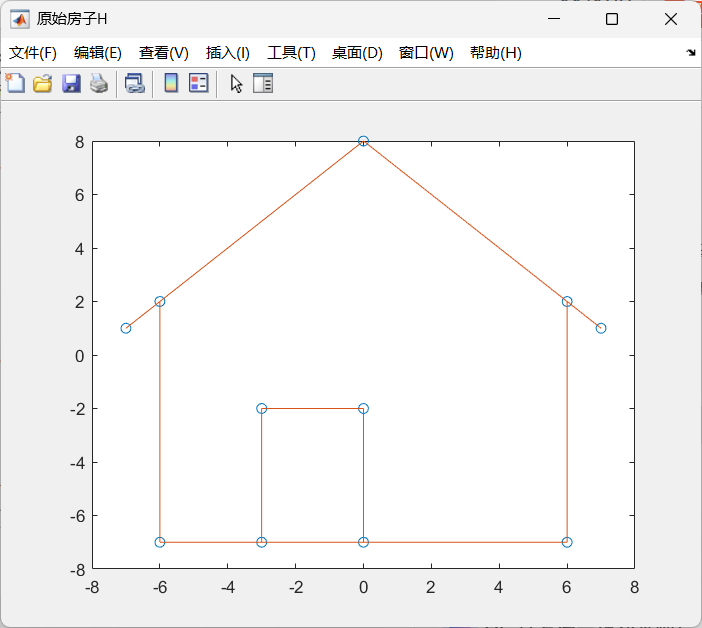
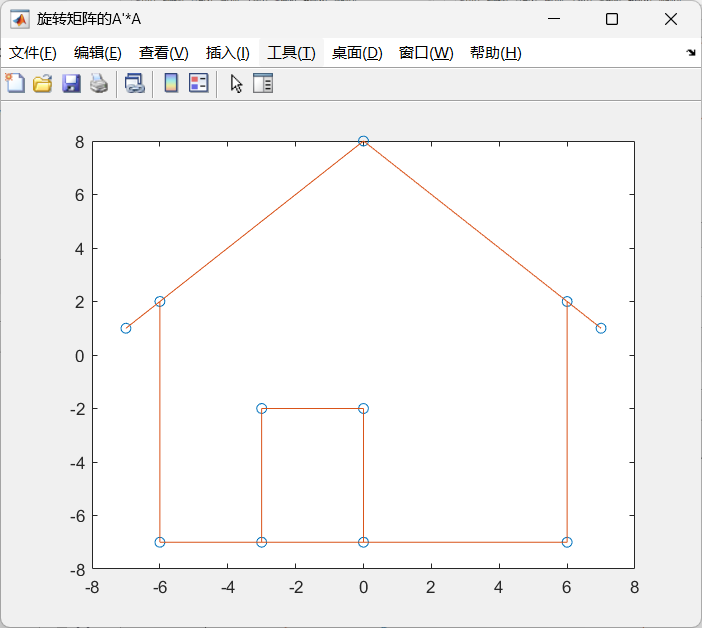
这一部分是可视化的图像,不属于理论。下面展示了
4
4
4 个房子和用于生成它们的矩阵。
H
H
H 的列是第一个房子的
11
11
11 个顶点(
H
H
H 是
2
×
12
2\times12
2×12 的,以便于 plot2d 连接第
11
11
11 个顶点和第
1
1
1 个顶点),
A
A
A 左乘房子矩阵
H
H
H 的
11
11
11 个顶点将得到变换后房子
A
H
AH
AH 的顶点。
房子矩阵
H
=
[
−
6
−
6
−
7
0
7
6
6
−
3
−
3
0
0
−
6
−
7
2
1
8
1
2
−
7
−
7
−
2
−
2
−
7
−
7
]
\pmb{房子矩阵}\kern 16ptH=\begin{bmatrix}-6&-6&-7&0&7&6&\kern 7pt6&-3&-3&\kern 7pt0&\kern 7pt0&-6\\-7&\kern 7pt2&\kern 7pt1&8&1&2&-7&-7&-2&-2&-7&-7\end{bmatrix}
房子矩阵H=[−6−7−62−710871626−7−3−7−3−20−20−7−6−7]
MATLAB 中画出标准房子的程序:
H = [-6 -6 -7 0 7 6 6 -3 -3 0 0 -6;-7 2 1 8 1 2 -7 -7 -2 -2 -7 -7];
x = H(1,:)'; y = H(2,:)';
axis([-10 10 -10 10]), axis('square') % 坐标范围是x轴-10~10,y轴-10~10,坐标区域显示为正方形
plot(x, y,'o', x, y, '-'); % 连接线是实线,顶点是圆圈

五、主要内容总结
- 变换 T T T 将每个输入空间中的 v \boldsymbol v v 映射为输出空间中的 T ( v ) T(\boldsymbol v) T(v).
- 若 T ( v + w ) = T ( v ) + T ( w ) T(\boldsymbol v+\boldsymbol w)=T(\boldsymbol v)+T(\boldsymbol w) T(v+w)=T(v)+T(w) 且 T ( c v ) = c T ( v ) T(c\boldsymbol v)=cT(\boldsymbol v) T(cv)=cT(v),则 T T T 是线性的:直线映射为直线。
- 线性变换将线性组合映射为线性组合: T ( c 1 v 1 + c 2 v 2 + ⋯ + c n v n ) = c 1 T ( v 1 ) + c 2 T ( v 2 ) + ⋯ + c n T ( v n ) T(c_1\boldsymbol v_1+c_2\boldsymbol v_2+\cdots+c_n\boldsymbol v_n)=c_1T(\boldsymbol v_1)+c_2T(\boldsymbol v_2)+\cdots+c_nT(\boldsymbol v_n) T(c1v1+c2v2+⋯+cnvn)=c1T(v1)+c2T(v2)+⋯+cnT(vn).
- T T T 为求导, T + T^+ T+ 为积分都是线性的。 A A A 为 m × n m\times n m×n 的矩阵,则 T ( v ) = A v T(\boldsymbol v)=A\boldsymbol v T(v)=Av 是将 R n \textrm{\pmb R}^n Rn 映射成 R m \pmb {\textrm R}^m Rm.
六、例题
【例8】消元矩阵
A
=
[
1
0
1
1
]
A=\begin{bmatrix}1&0\\1&1\end{bmatrix}
A=[1101] 给出一个从
(
x
,
y
)
(x,y)
(x,y) 到
T
(
x
,
y
)
=
(
x
,
x
+
y
)
\pmb{T(x,y)=(x,x+y)}
T(x,y)=(x,x+y) 的剪切变换(shearing transformation). 如果输入向量填满一个正方形,画出变换后的正方形。
解:
x
x
x 轴上的点
(
1
,
0
)
(1,0)
(1,0) 和
(
2
,
0
)
(2,0)
(2,0) 进行
T
T
T 变换后是与
x
x
x 轴成
45
°
45°
45° 角直线上的点
(
1
,
1
)
(1,1)
(1,1) 和
(
2
,
2
)
(2,2)
(2,2).
y
y
y 轴上的点没有移动:
T
(
0
,
y
)
=
(
0
,
y
)
T(0,y)=(0,y)
T(0,y)=(0,y),这个是
λ
=
1
\lambda=1
λ=1 的特征向量。垂直的线向上滑动,这就是剪切,因此正方形变成了平行四边形。

【例9】若要非线性变换
T
T
T 可逆,那么需要输出空间中的每个向量
b
\boldsymbol b
b 都恰好对应输入空间的一个
x
\boldsymbol x
x:
T
(
x
)
=
b
T(\boldsymbol x)=\boldsymbol b
T(x)=b 总是恰好有一个解。下面这些变换(
x
x
x 为实数)哪些是可逆的?若可逆,则
T
−
1
T^{-1}
T−1 是什么?它们不是线性的,甚至
T
3
T_3
T3 也不是。 当求解
T
(
x
)
=
b
T(\boldsymbol x)=\boldsymbol b
T(x)=b 时,就是在求
T
T
T 的逆:
T
1
(
x
)
=
x
2
T
2
(
x
)
=
x
3
T
3
(
x
)
=
x
+
9
T
4
(
x
)
=
e
x
T
5
(
x
)
=
1
x
(
x
≠
0
)
\color{blue}T_1(x)=x^2\kern 10ptT_2(x)=x^3\kern 10ptT_3(x)=x+9\kern 10ptT_4(x)=e^x\kern 10ptT_5(x)=\frac{1}{x}(x\neq0)
T1(x)=x2T2(x)=x3T3(x)=x+9T4(x)=exT5(x)=x1(x=0)解:
T
1
T_1
T1 不可逆:
x
2
=
1
x^2=1
x2=1 有两个解并且
x
2
=
−
1
x^2=-1
x2=−1 无解。
T
4
T_4
T4 不可逆因为
e
x
=
−
1
e^x=-1
ex=−1 无解。(如果输出空间改为正数
b
b
b,则
e
x
=
b
e^x=b
ex=b 的逆就是
x
=
ln
b
x=\ln b
x=lnb.)
注意
T
5
2
(
x
)
=
1
T^2_5(x)=1
T52(x)=1(取两次倒数)是恒等变换,但是
T
3
2
(
x
)
=
x
+
18
T_3^2(x)=x+18
T32(x)=x+18,
T
2
2
(
x
)
=
x
9
T_2^2(x)=x^9
T22(x)=x9,
T
4
2
(
x
)
=
e
e
x
T_4^2(x)=e^{e^x}
T42(x)=eex.
T
2
,
T
3
,
T
5
T_2,T_3,T_5
T2,T3,T5 可逆:
x
3
=
b
,
x
+
9
=
b
x^3=b,x+9=b
x3=b,x+9=b 和
1
x
=
b
\displaystyle\frac{1}{x}=b
x1=b 都只有一个解:
x
=
T
2
−
1
(
b
)
=
b
1
/
3
x
=
T
3
−
1
(
b
)
=
b
−
9
x
=
T
5
−
1
(
b
)
=
1
b
\color{blue}x=T_2^{-1}(b)=b^{1/3}\kern 10ptx=T_3^{-1}(b)=b-9\kern 10ptx=T_5^{-1}(b)=\frac{1}{b}
x=T2−1(b)=b1/3x=T3−1(b)=b−9x=T5−1(b)=b1
【例10】
H
H
H 是一个房子图形的矩阵,可以使用下面的函数 plot2d(H) 来绘制这个房子:
房子矩阵
H
=
[
−
6
−
6
−
7
0
7
6
6
−
3
−
3
0
0
−
6
−
7
2
1
8
1
2
−
7
−
7
−
2
−
2
−
7
−
7
]
\pmb{房子矩阵}\kern 16ptH=\begin{bmatrix}-6&-6&-7&0&7&6&\kern 7pt6&-3&-3&\kern 7pt0&\kern 7pt0&-6\\-7&\kern 7pt2&\kern 7pt1&8&1&2&-7&-7&-2&-2&-7&-7\end{bmatrix}
房子矩阵H=[−6−7−62−710871626−7−3−7−3−20−20−7−6−7]
function [] = plot2d(H) % 定义函数 plot2d,输入参数是 H,无输出参数
x = H(1,:)'; y = H(2,:)';
axis([-10 10 -10 10]), axis('square')
plot(x, y, 'o', x, y, '-'); % 'o' 表示圆圈,'-' 表示实线段
end
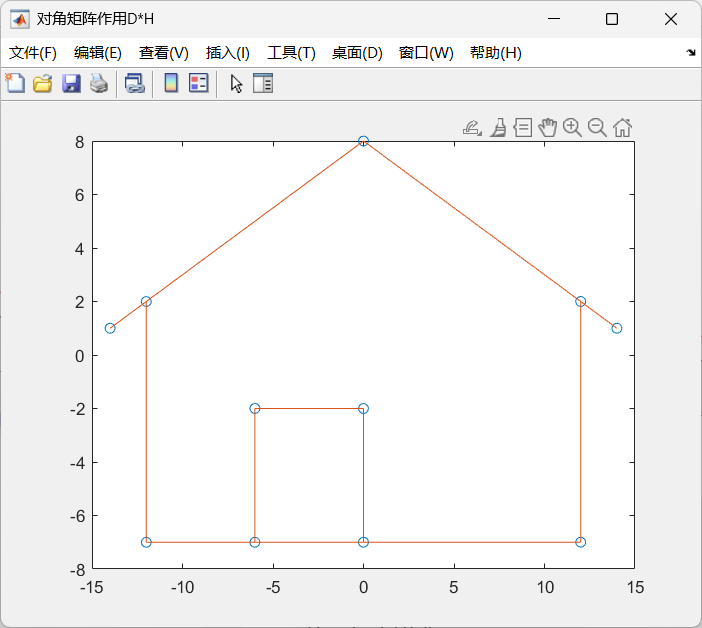
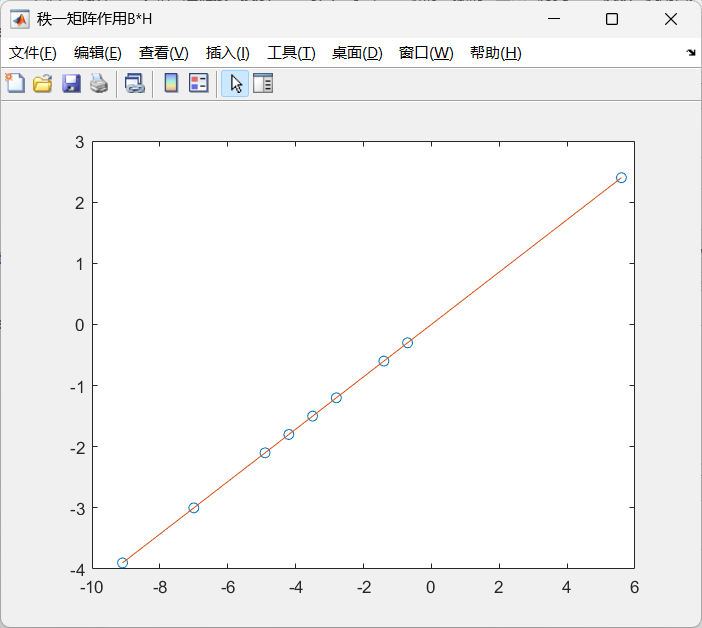
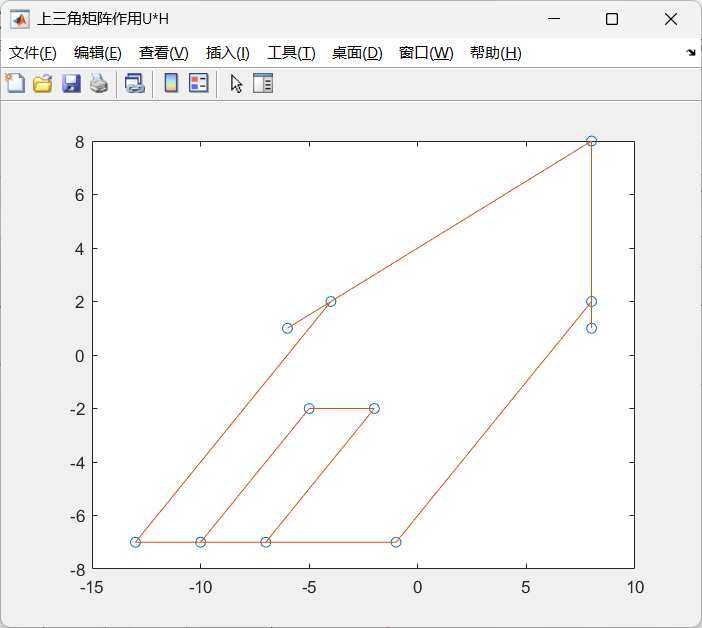
(1)使用 plot2d(H) 画出这个房子矩阵的图,并画出以下矩阵作用后的图 plot2d(DH),plot2d(BH),plot2d(U*H):
D
=
[
2
0
0
1
]
B
=
[
0.7
0.7
0.3
0.3
]
U
=
[
1
1
0
1
]
D=\begin{bmatrix}2&0\\0&1\end{bmatrix}\kern 10ptB=\begin{bmatrix}0.7&0.7\\0.3&0.3\end{bmatrix}\kern 10ptU=\begin{bmatrix}1&1\\0&1\end{bmatrix}
D=[2001]B=[0.70.30.70.3]U=[1011](2)设变换
T
T
T 满足
T
(
v
)
=
−
v
+
(
1
,
0
)
T(\boldsymbol v)=-\boldsymbol v+(1,0)
T(v)=−v+(1,0) 时,则经过此 “仿射变换” 后的图形如何?
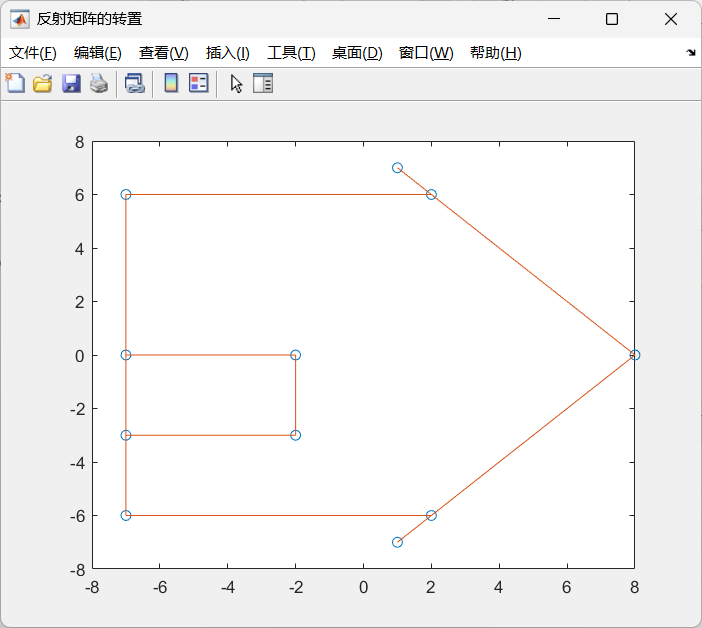
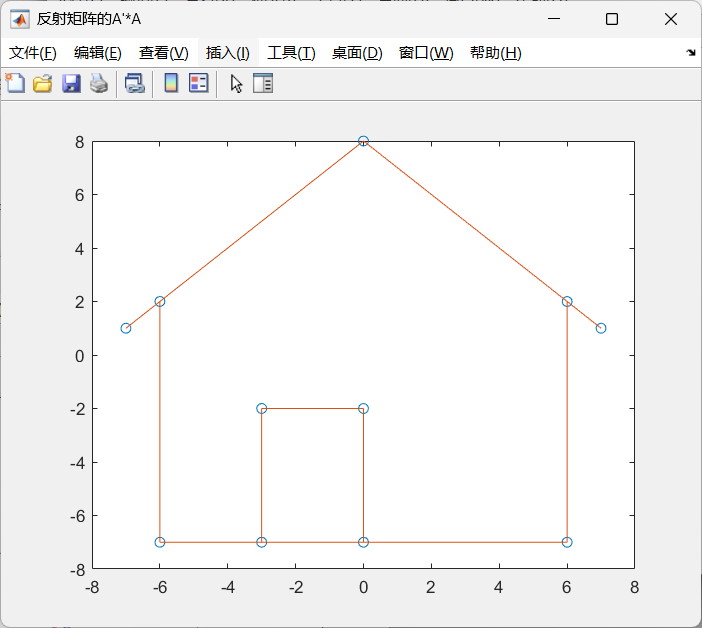
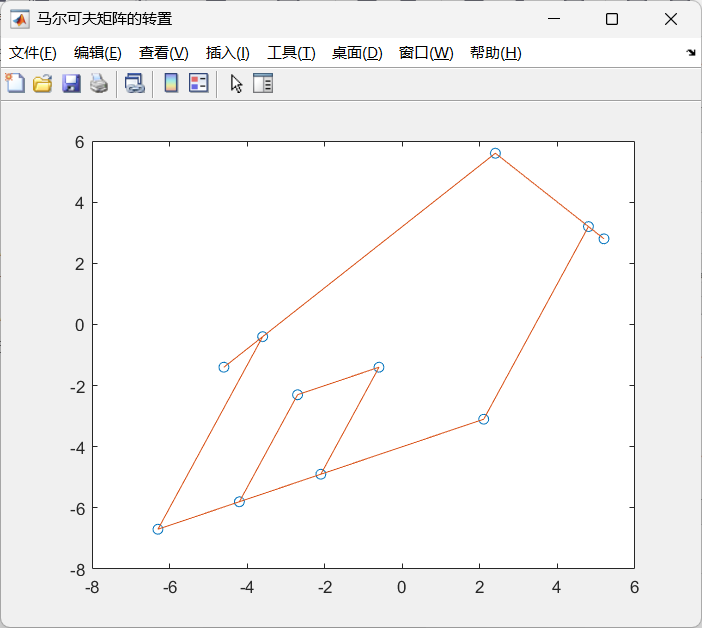
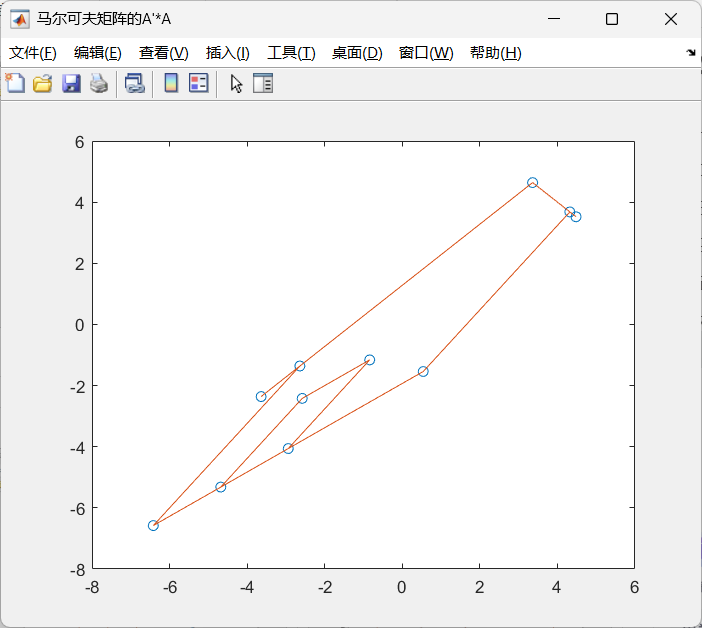
(3)使用 Figure 8.2 中的矩阵来测试 plot2d(A’ * H) 和 plot2d(A’ * A * H).
解: 下面是 MATLAB画出这些图形的程序:
H = [-6 -6 -7 0 7 6 6 -3 -3 0 0 -6;
-7 2 1 8 1 2 -7 -7 -2 -2 -7 -7];
figure('Name','原始房子H','NumberTitle','off');
plot2d(H);
D = [2 0; 0 1];
figure('Name','对角矩阵作用D*H','NumberTitle','off');
plot2d(D*H);
B = [0.7 0.7; 0.3 0.3];
figure('Name','秩一矩阵作用B*H','NumberTitle','off');
plot2d(B*H);
U = [1 1; 0 1];
figure('Name','上三角矩阵作用U*H','NumberTitle','off');
plot2d(U*H);
figure('Name','仿射变换T(v)=-v+(1,0)','NumberTitle','off');
plot2d(-H + [1;0]);
A = [cosd(35) -sind(35); sind(35) cosd(35)]; % cosd(),sind()为直接输入角度的函数
figure('Name','旋转矩阵的转置','NumberTitle','off');
plot2d(A'*H);
figure('Name','旋转矩阵的A''*A','NumberTitle','off');
plot2d(A'*A*H);
A = [0 1; 1 0]; % 反射矩阵
figure('Name','反射矩阵的转置','NumberTitle','off');
plot2d(A'*H);
figure('Name','反射矩阵的A''*A','NumberTitle','off');
plot2d(A'*A*H);
A = [0.7 0.3; 0.3 0.7]; % 马尔可夫矩阵
figure('Name','马尔可夫矩阵的转置','NumberTitle','off');
plot2d(A'*H);
figure('Name','马尔可夫矩阵的A''*A','NumberTitle','off');
plot2d(A'*A*H);
(1)MATLAB运行的图像如下:
|
|
|
|
(2)仿射变换:

(3)矩阵的转置:

|
|
|
|
|
|
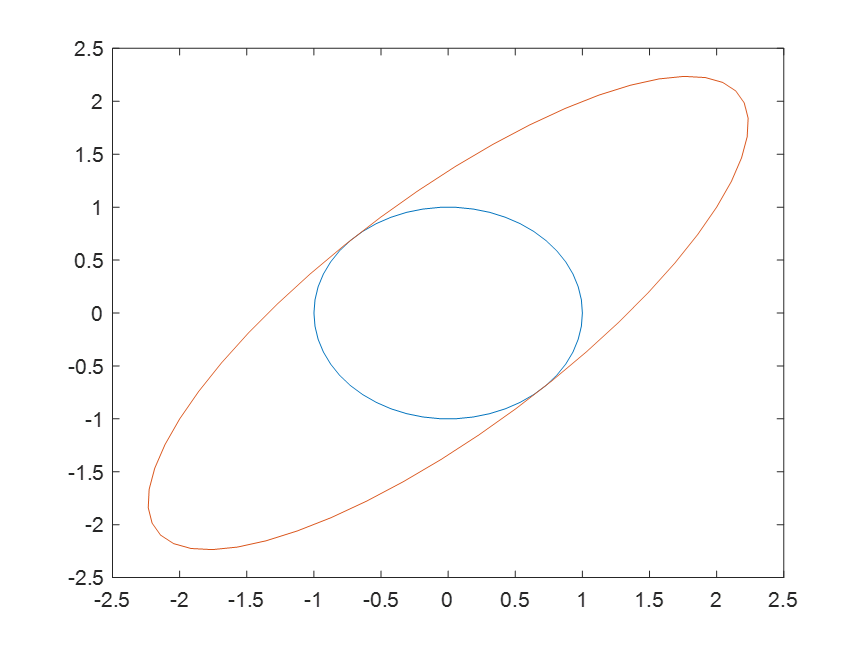
【例11】下面代码是先创建一个包含 50 个角度的向量 theta, 然后生成一个单位圆,再使用变换 T ( v ) = A v T(\boldsymbol v) = A\boldsymbol v T(v)=Av 将这个单位圆变换成椭圆。最后绘制出这个单位圆和椭圆。
A = [2 1;1 2]; % 变换矩阵A
theta = 0:2*pi/50:2*pi; % 0~2π共50个角度的theta向量
circle = [cos(theta); sin(theta)]; % 单位圆矩阵
ellipse = A * circle; % 变换成椭圆
axis([-4 4 -4 4]); axis('square');
plot(circle(1, :), circle(2, :), ellipse(1, :), ellipse(2, :)) % 绘制单位圆和变换后的椭圆,其中circle(1, :)表示矩阵第一列的所有数据,此处是横坐标
解: 下面是 MATLAB运行后的图形

















 794
794

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









