







接前一篇文章:裁员避坑指南(5)
常识2
离职或裁员时,未休年休假如何计算?
当公司裁员或员工主动离职时,员工有未休的年假,公司应当按照员工当年已工作时间折算应休未休年休假天数,并支付相应的工资报酬。具体补偿方式如下:
- 折算方法
折算公式为:
(当年度在本单位已过日历天数÷365天)× 职工本人全年应当享受的年休假天数-当年度已安排年休假天数
如果折算后的天数不足1整天,则不支付未休年休假工资报酬。
- 补偿标准
对于应休未休的年休假天数,用人单位应当按照员工日工资收入的300%支付年休假工资报酬。这里的300%包括了员工正常工作期间的工资收入,因此实际需要额外支付的是日工资的200%作为补偿。
- 法律依据
根据《企业职工带薪年休假实施办法》第十条、第十一条的规定,带薪年休假的300%工资报酬和法定节假日加班的300%加班工资含义不同。带薪年休假的300%工资报酬中已包含了正常工作期间的工资收入部分,实际为另付200%。
- 实际操作
员工应当与用人单位协商解决此事。如果协商不成,员工可以依法向劳动监察部门投诉,或者向劳动仲裁委员会提出劳动仲裁申请,劳动仲裁是免费的。在申请仲裁时,员工需要提供相关证据,如劳动合同、工资单、未休年假的证明等,以支持自己的诉求。
总之,公司在裁员时应当充分考虑员工的未休年假情况,并按照法律规定进行补偿。员工也应当了解自己的权益,并在必要时采取合适的措施来维护自己的合法权益。
注意:这里特别说明一点。无论是公司裁员还是员工主动离职,未休年休假都是有效的,因此并不区分这两种情况。参见以下实际案例:
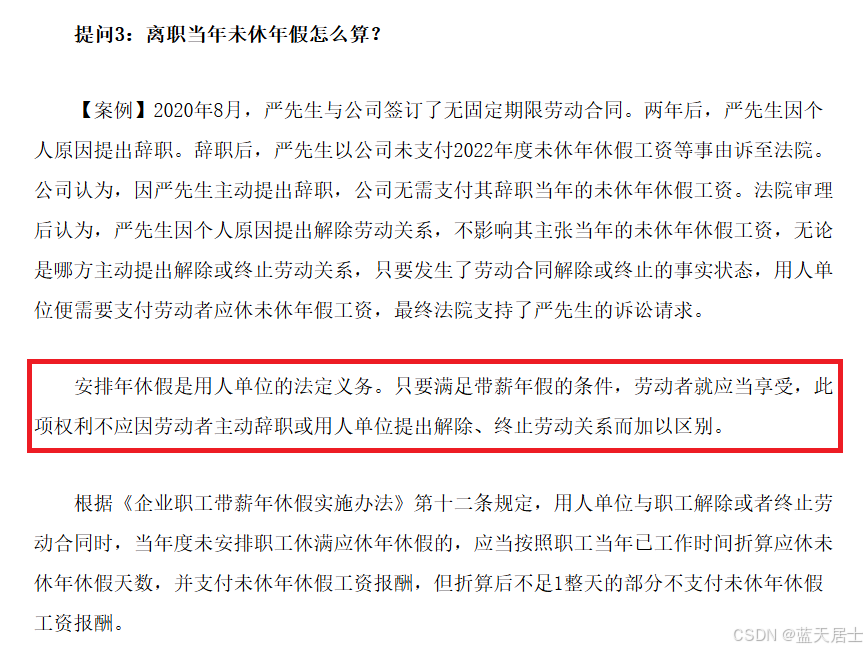
此外,这里要多说一点。对于离职或裁员时未休的年休假,公司有两个选择:(1)支付300%日工资;(2)离职日期往后顺延,即强制把年假休完。绝大多数公司都会选择方案(2)。此时,员工是不能拒绝的,不能拒绝休假而要300%,这是法律所不支持的。



















 1915
1915

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











