






第一步:在CAD里面进行放线定位。
1这个无需多说,只是线框需要进行闭合;2保存时尽量选择低版本CAD;3图形上的中点必须落在CAD坐标原点(#0,0;中心);4图形不能是块.
第二步:导入截面型材
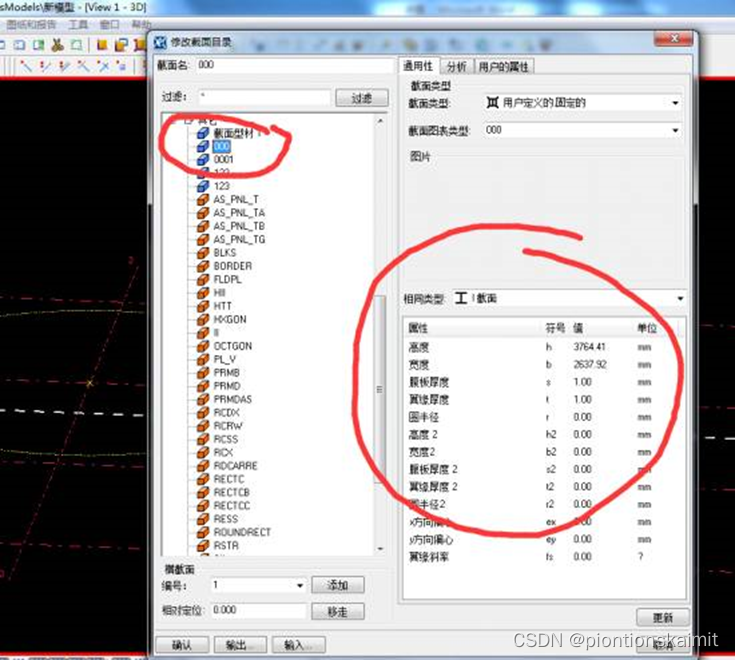
如图,选择:目录—定义截面—用DWG文件定义截面
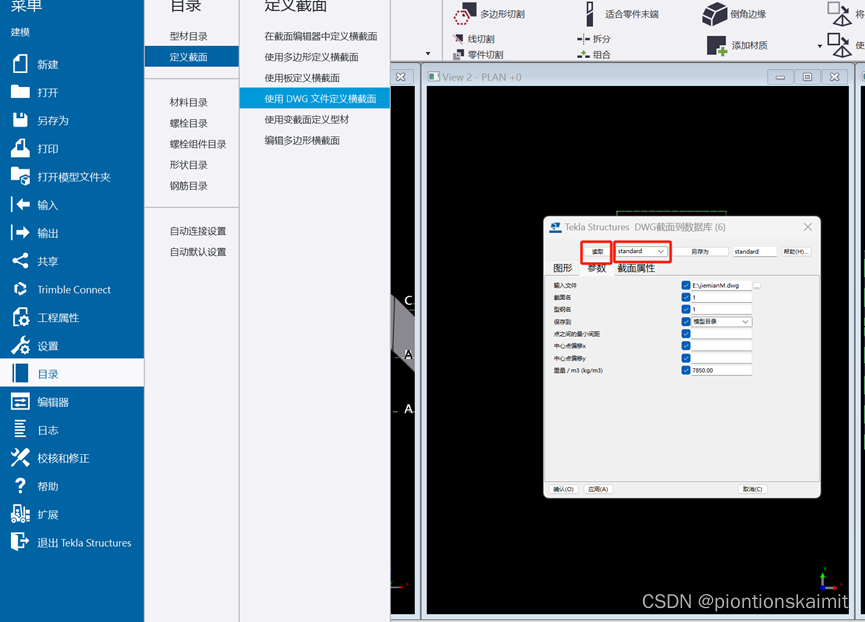
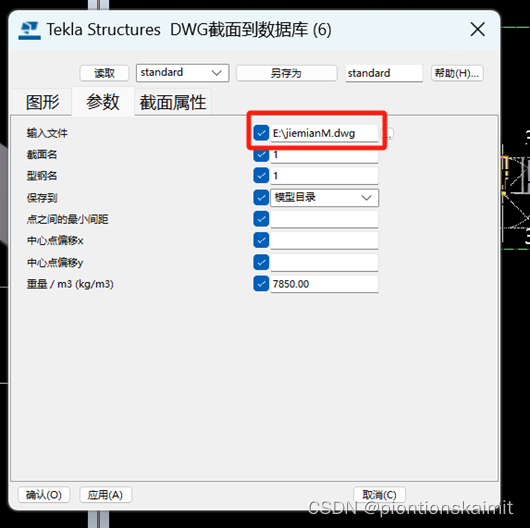
出现中对话框,按一下读取清除一下数据,选择参数—输入文件,选择相应的CAD(CAD存放位置不能在桌面必须在盘里,文件和路径名必须是英文)文件,确认,然后为截面命名。
命令栏提示选择位置,然后在模型中随意选择相应位置即可。
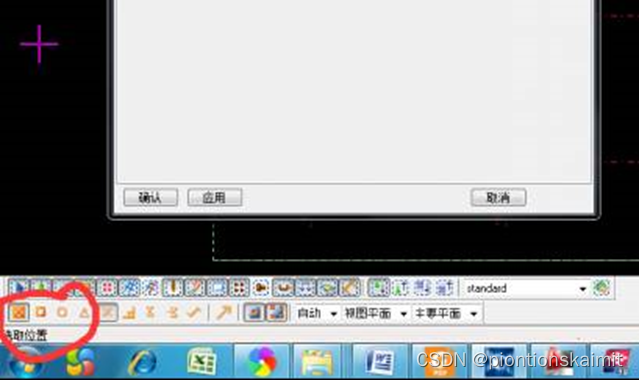
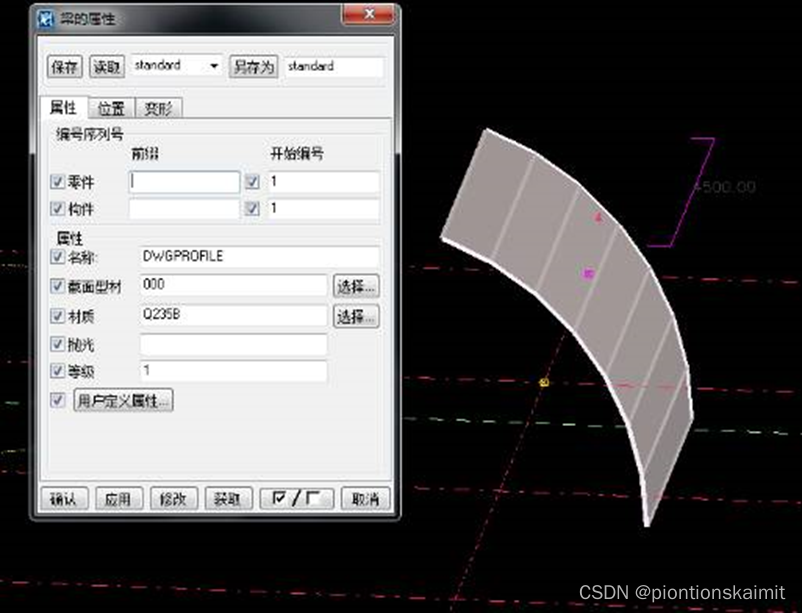
如图所示,截面已经建好。相关截面会显示在截面库里。
第三步:绘制辅助线,完成建模
由于穹顶同一标高点均在同心圆上,在截面所在标高绘制相应半径的辅助圆,利用折梁进行建模
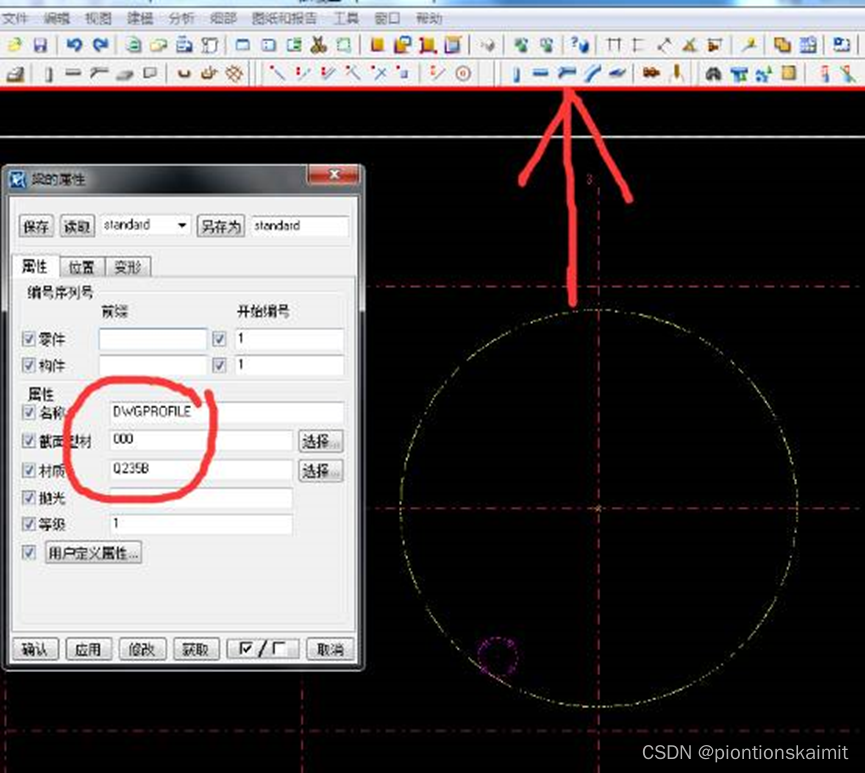
折梁切角属性改为切圆角便可显示为圆形。
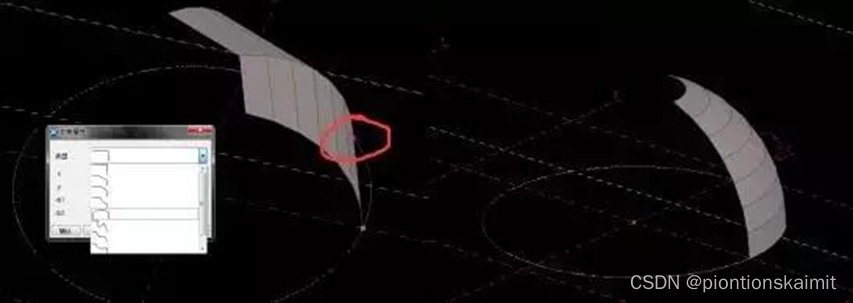
然后选择性复制—旋转即可。

















 8416
8416

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









