






永磁同步电机超螺旋滑模控制算法仿真模型,有很强的鲁棒性,减小滑模抖振现象,可与常规滑模观测控制算法对比以体现改进,基于matlab/simulink搭建,以供参考学习
ID:46200680046595865
阳光彩虹小彪马
永磁同步电机超螺旋滑模控制算法的仿真模型是一种具有很强鲁棒性的控制算法,在减小滑模抖振现象方面表现出色。本文通过与常规滑模观测控制算法进行对比,展示了该算法的改进之处。为了让读者更好地理解该算法的工作原理和实现方式,我们使用基于Matlab Simulink的仿真模型进行了搭建,供读者参考学习。
首先,我们来介绍一下永磁同步电机的基本原理和特点。永磁同步电机是一种常见的高性能电机,其具有高效率、高功率密度和高控制精度等优点,因此在工业应用领域得到了广泛应用。然而,在实际控制过程中,由于电机本身的非线性和外界扰动等因素的存在,常规控制算法难以满足对电机控制的高要求。
为了克服这些问题,超螺旋滑模控制算法应运而生。该算法通过引入非线性超越函数和滑模面曲线的超螺旋形状,有效地抑制了滑模抖振现象的产生。与常规滑模观测控制算法相比,永磁同步电机超螺旋滑模控制算法在性能上有了显著的提升。
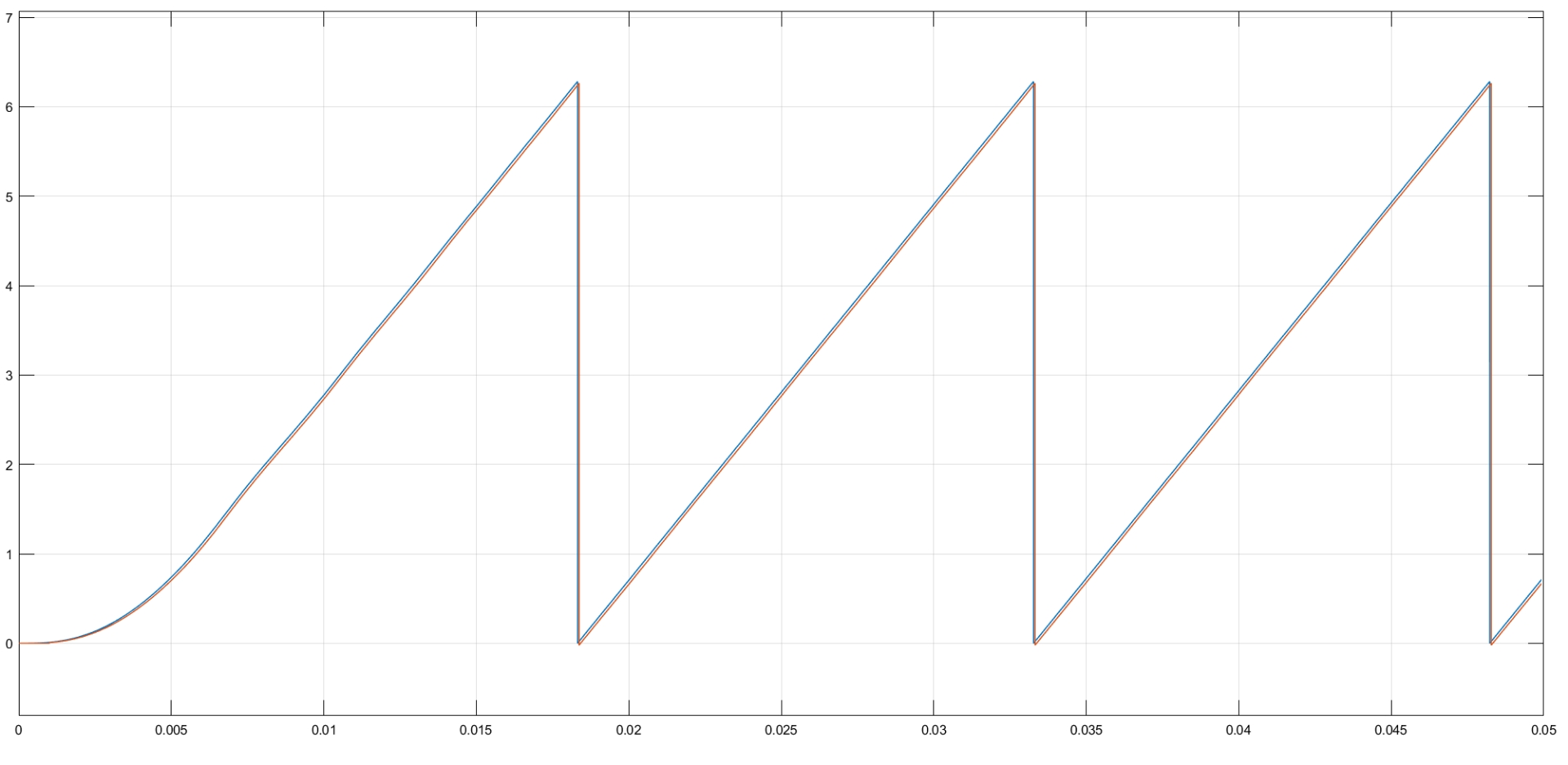
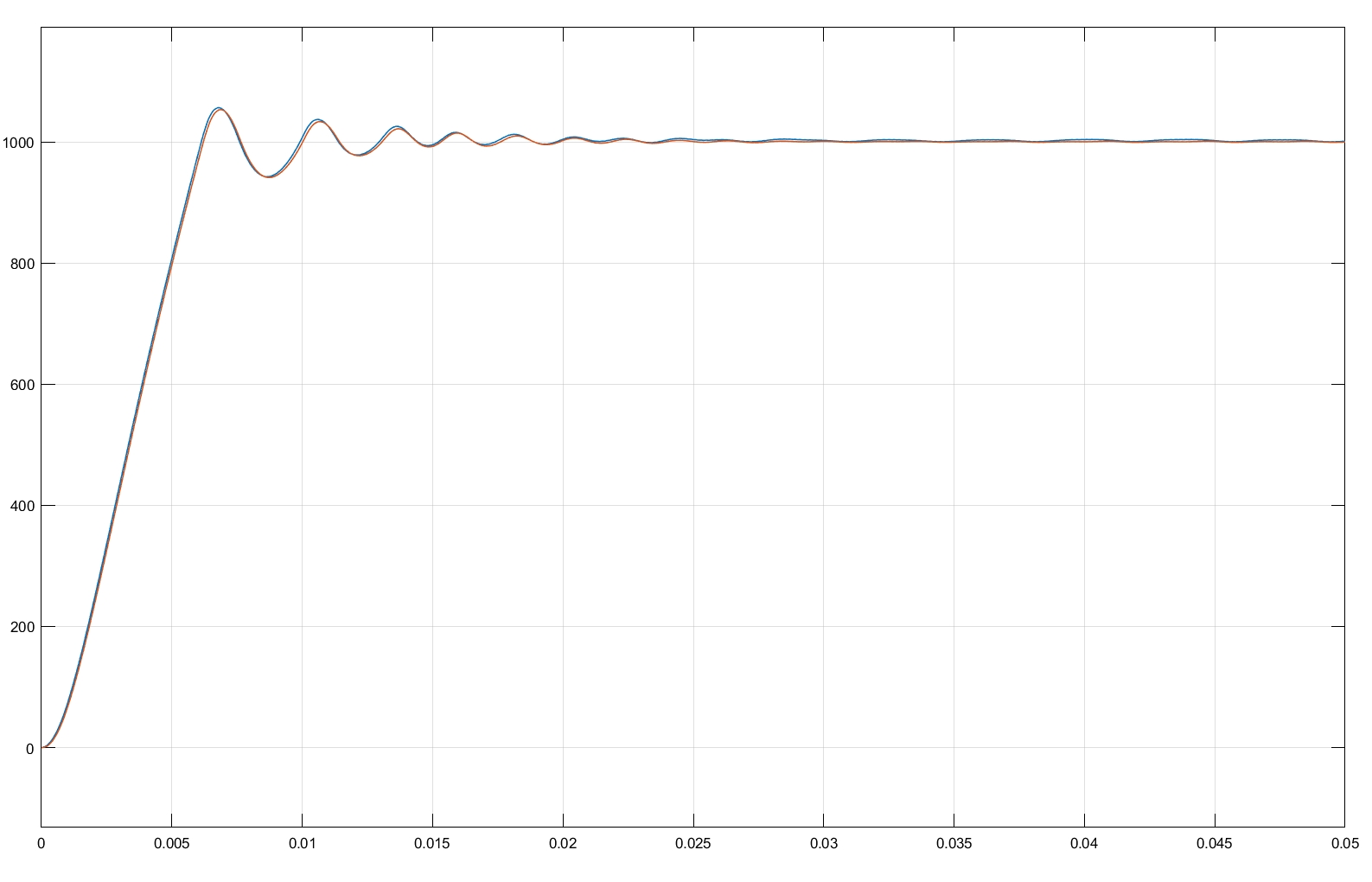
为了验证改进后的超螺旋滑模控制算法的有效性,我们使用Matlab Simulink进行了仿真模拟。在仿真模型中,我们考虑了电机本身的非线性特性以及外界扰动的影响,对比了常规滑模观测控制算法和改进后的超螺旋滑模控制算法在速度和位置控制上的表现。通过仿真结果的对比分析,我们可以清楚地看到改进后的算法在减小滑模抖振现象方面取得了良好的效果。
除了在滑模抖振现象的抑制上有明显的改进,超螺旋滑模控制算法还具有较强的鲁棒性。在实际应用中,电机系统往往会受到多种不确定性因素的干扰,例如电机参数的变化、负载的变化等。改进后的算法能够较好地适应这些不确定性,保持较好的控制性能。
总之,永磁同步电机超螺旋滑模控制算法是一种具有很强鲁棒性的控制算法,能够有效减小滑模抖振现象,提高控制性能。通过与常规滑模观测控制算法的对比,我们可以清楚地看到该算法的改进之处。我们使用Matlab Simulink搭建了仿真模型,为读者提供了一个参考学习的工具。希望本文对读者在永磁同步电机控制领域的研究和应用有所帮助。
【相关代码 程序地址】: http://nodep.cn/680046595865.html















 657
657











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









