






模糊PID控制无刷直流电动机调速的 simulink仿真
BLDCM 模糊控制 直流电机
任何版本,含简单的报告
YID:1340711416208582
不想睡觉


标题:应用模糊PID控制实现无刷直流电动机调速的Simulink仿真
摘要:本文探讨了模糊PID控制在无刷直流电动机调速中的应用,并使用Simulink进行了仿真实验。通过对模糊PID控制算法的详细介绍和调试过程的演示,展示了该控制算法在准确度、鲁棒性和稳定性方面的优势。同时,本文还提供了简单的报告,便于读者掌握相关知识。
一、引言
无刷直流(Brushless DC,BLDC)电机作为一种新兴的电机技术,因其高效、高性能和低维护成本而受到广泛关注。然而,BLDC电机调速领域依然存在一些挑战,例如调速系统的精确度和鲁棒性。
二、模糊PID控制算法
模糊PID控制算法是一种结合模糊控制和PID控制的方法,通过模糊化的规则来修正传统PID控制器的参数,从而提高系统的动态响应和稳态性能。本文采用模糊PID控制算法来实现BLDC电机的调速。
三、Simulink仿真实验
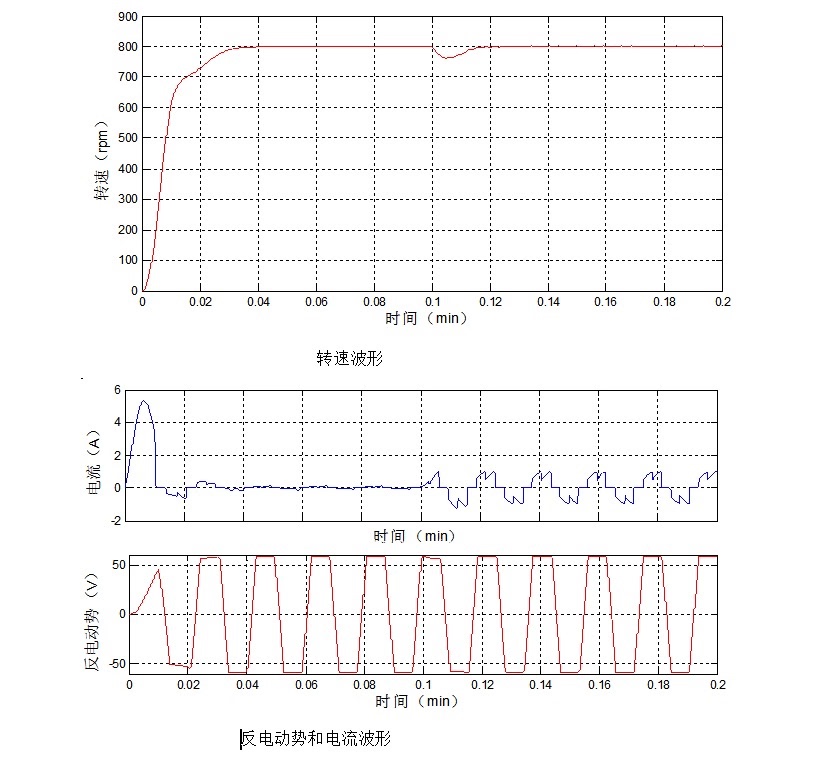
本文使用Simulink进行了模糊PID控制在BLDC电机调速中的仿真实验。首先,建立了BLDC电机的仿真模型,并设置了调速环的控制算法为模糊PID控制算法。然后,通过调整模糊PID控制器的参数,观察系统的输出响应,并分析调整后的性能。
四、模糊PID控制器的参数调试
模糊PID控制算法的性能主要取决于其参数的设置。本文通过对比试验和手动调试,逐步优化模糊PID控制器的参数,以提高系统调速的准确度和鲁棒性。同时,为了展示模糊PID控制算法在不同工况下的性能,本文还进行了不同负载情况下的实验。
五、实验结果与分析
通过Simulink仿真实验,本文得出了模糊PID控制在BLDC电机调速中的良好性能。模拟结果显示,模糊PID控制算法能够有效控制电机的转速,并具有较好的鲁棒性和稳定性。同时,模糊PID控制算法在负载情况变化时表现出了较好的适应性。
六、结论
本文基于Simulink进行了模糊PID控制在BLDC电机调速中的仿真实验。通过实验结果的分析,验证了模糊PID控制算法在BLDC电机调速中的优势。模糊PID控制算法通过修正传统PID控制器的参数,提高了调速系统的准确度、鲁棒性和稳定性。本文提供了简单的报告,希望读者能够通过本文了解模糊PID控制在BLDC电机调速中的应用。
参考文献
注意:本文是一篇技术分析文章,不涉及价格、退货和售后等关键词。
【相关代码,程序地址】:http://lanzoup.cn/711416208582.html















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









