







一、前言
1.1 关于串口测试工具,网上已经有集成好的应用程序提供大家使用,但其只提供功能接口,内部具体怎么实现的还需要自己去探索;
1.2 关于串口通信的测试程序在网上已经是数见不鲜,但也不排除很多是直接“参考”别人的(ctrl+c),而且很多代码没有相关注释,从而某些细节性的问题就被忽略;
1.3 本例程序不需全部读完,分为3大部分,设置通信协议、读写字符串函数编写、通信的测试函数,测试函数自己选取看两个典型的就OK;如果哪有说的有误,希望大家指正,多交流共同进步;
1.4 要点:①本文提供了设置串口通讯的接口,方便大家对程序的复用,感觉还是面向对象的语言更方便呀;②在给模块发送指令后需要读取模块返回的数据时,保险起见采用阻塞式读取,且串口一次只能读取8位byte数据,注意读取数据的调用函数;③注意在读写命令中存在0x00(零)的16进制的数据时的方式;④通信成功,但恰遇到模块总返回操作失败的代码的问题。
二、串口测试程序的实现
2.1 要实现串口通信的操作,首先是找到需要操作的对象,即具体的串口设备,一般都在linux嵌入式设备的/dev/路径下有很多串口设备,找到自己所要操作的串口设备,例如本例程所操作的是/dev/ttySAC0, ttySAC0为串口设备名称;
2.2 模块的串口通信协议,不同的模块之间有细微差别,自己作相应的改动就好。本例程的通信协议:波特率9600bps, 8位数据位,1位起始位,一位停止位,无奇偶校验。通信成功时,返回的是操作成功或者操作失败的代码,
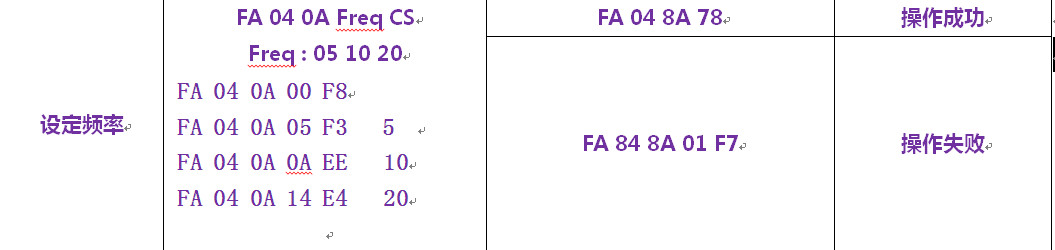
PS:操作失败并不是说的是通信失败,因为去访问模块时,模块给了应答,表明通信是成功的,只能说明是硬件本身操作失败。发送的指令中存在CS,其值为0减去前面CS前面所有16进制的相加-例:80 06 05 01 CS, CS为:0-(80+06+05+01)=74 ,即需要发送的代码为80 06 05 01 74;
2.3 源码如下:
#include<string.h>
#include<stdio.h>
#include<stdlib.h>
#include<unistd.h>
#include<sys/types.h>
#include<sys/stat.h>
#include<termios.h>
#include<fcntl.h>
#include<errno.h>
#define TRUE 1
#define FALSE -1
#define BUFF_MAXSIZE 2048
#define FREQUENCY_00 0 //设定的频率为0
#define FREQUENCY_05 5 //设定的频率为5
#define FREQUENCY_10 10 //设定的频率为10
#define FREQUENCY_20 20 //设定的频率为20
#define RESOLUTION_ONE_MM 1 //1表示选择设定的分辨率为1mm
#define RESOLUTION_Z_P_ONE_MM 2 //2表示选择设定的分辨率为0.1mm
#define MEASURING_POWER_ON 1 //1表示上电即测开启
#define MEASURING_POWER_OFF 0 //0表示上电即测关闭
typedef unsigned char un_char;
//初始化设置,即设置通信协议
int OpenDev(char *dev);//打开串口设备文件
int set_speed(int fd, int speed, struct termios* newtio);//设置波特率
int Set_Parity(int fd, int databits, int stopbits, int parity);//设置数据位、停止位、校验位
//数据读写函数
int Write_Data(int fd, void *buf, int len);//发送命令代码函数
int Read_Data(int fd, char *buff);//接收命令代码函数
//模块的功能函数
int Open_LaserModule(int fd);//模块的打开
int Close_LaserModule(int fd);//模块的关闭
int Set_Address(int fd);//设置地址
un_char* Read_Parameter(int fd, un_char* device_parameter);//读取参数
un_char* Read_Device_Num(int fd, un_char* device_num);//读取机器号
int Distance_Modification(int fd, int decrease_or_increase, int distance_int);//距离修改,参数decrease_or_increase表示修正可选为取负或者取正,参数distance表示要修正的距离
int Mea_Interval(int fd, int interval_time_int);//连续测量时设置数据返回时间间隔,参数interval_time_int表示要设定的时间间隔为interval_time_int秒
int Distance_StartStop(int fd, int position_int);//设置距离起止点,参数position_int的值(1顶端算起;0加上模块长度+上面的距离修正)
int Set_MeasuringRange(int fd, int range);//设定量程,range表示要设定的量程大小05, 10, 30, 50, 80
int Set_Frequency(int fd, int freg);//设定频率,freg表示要设定的频率大小,00,05,10,20
int Set_Resolution(int fd, int mode);//设定分辨率,当mode=1表示设定的分辨率为1mm,当mode=2表示设定的分辨率为0.1mm
int Measuring_Power(int fd, int on_off);//设定上电即测,on_off=1表示开启该功能,on_off=0表示关闭该功能
int Single_Measurement_Broadcast(int fd);//单次测量(广播命令,返回结果存入模块缓存)
un_char* Read_Cache(int fd, un_char* cache_data);//读取缓存
un_char* Single_Measurement(int fd, un_char* single_mea);//单次测量
un_char* Continuous_Measurement(int fd, un_char* continuous_mea);//连续测量
int speed_arr[]={B115200, B38400, B19200, B9600, B4800, B2400, B1200, B300, B38400, B19200, B9600, B4800, B2400, B1200, B300};
int name_arr[]={115200, 38400, 19200, 9600, 4800, 2400, 1200, 300, 115200, 38400, 19200, 9600, 4800, 2400, 1200, 300};
int main(int argc, char *argv[])
{
int fd;
un_char Buff_data_device[BUFF_MAXSIZE] = {0};//我只是测试用,就在栈分配的空间,正式编写一般需要自己分配动态内存
struct termios oldtio, newtio;
//打开串口
char *dev = "/dev/ttySAC0";
fd = OpenDev(dev);
tcgetattr(fd, &oldtio);
if(fd > 0)
{
set_speed(fd, 9600, &newtio);//设置9600bps波特率
}else
{
printf("Can't Open Serial Port!/n");
exit(0);
}
if(Set_Parity(fd, 8, 1, 'S') == FALSE)//调用设置8位数据位,1位停止位及无校验位
{
printf("Set Parityu Error!/n");
exit(1);
}
//测试函数的调用
Open_LaserModule(fd);
Set_Resolution(fd, RESOLUTION_Z_P_ONE_MM);
Measuring_Power(fd, MEASURING_POWER_ON);
Set_Frequency(fd, FREQUENCY_05);
Set_MeasuringRange(fd, RANGE_80);
sleep(5);
Read_Parameter(fd, Buff_data_device);
Set_Address(fd);
Distance_Modification(fd, DISTANCE_IN, 2);
Mea_Interval(fd, 5);
Distance_StartStop(fd, 0);
sleep(5);
Read_Cache(fd, Buff_data_device);
sleep(5);
Single_Measurement(fd, Buff_data_device);
sleep(5);
Continuous_Measurement(fd, Buff_data_device);
Close_LaserModule(fd);
close(fd);
}
//打开文件设备
int OpenDev(char *dev)
{
int fd = open(dev, O_RDWR | O_NOCTTY | O_NDELAY);
if(fd == -1)
{
printf("Can't Open Serial Port!\n");
return FALSE;
}else
return fd;
}
//设置波特率
int set_speed(int fd, int speed, struct termios* newtio)
{
int i;
int status;
struct termios* Opt = newtio;
tcgetattr(fd, Opt);
for(i = 0; i < sizeof(speed_arr)/sizeof(int); i++)
{
if(speed == name_arr[i])
{
tcflush(fd, TCIOFLUSH);
cfsetispeed(Opt, speed_arr[i]);
cfsetospeed(Opt, speed_arr[i]);
status = tcsetattr(fd, TCSANOW, Opt);
if(status != 0)
{
printf("tcsetattr failed!\n");
return FALSE;
}
tcflush(fd, TCIOFLUSH);
}
}
return TRUE;
}
//设置fd的数据位、停止位、奇偶检验位
int Set_Parity(int fd, int databits, int stopbits, int parity)
{
struct termios options;
if(tcgetattr(fd, &options) != 0)
{
printf("Setup Serial 1 error!\n");
return FALSE;
}
//对options的起始地址开始的termios结构体内存置零
bzero(&options,sizeof(options));
options.c_cflag &= ~CSIZE;
//选择数据位
switch(databits)
{
case 7:options.c_cflag |= CS7;
break;
case 8:options.c_cflag |= CS8;
break;
default:printf("Unsupported data size!/n");
return FALSE;
}
//选择奇偶校验
switch(parity)
{
case 'n':
case 'N':
options.c_cflag &= ~(PARENB);
options.c_cflag &= ~(INPCK);
break;
case 'o'://偶校验
case 'O':
options.c_cflag |= (PARODD | PARENB);
options.c_cflag |= INPCK;
break;
case 'e'://偶校验
case 'E':
options.c_cflag |= PARENB;
options.c_cflag &= ~(PARODD);
options.c_cflag |= INPCK;
break;
case 's'://无奇偶校验
case 'S':
options.c_cflag &= ~(PARENB);
options.c_cflag &= ~(CSTOPB);
break;
default:
printf("Unsupported parity!/n");
return FALSE;
}
//选择停止位
switch(stopbits)
{
case 1:
options.c_cflag &= ~(CSTOPB);
break;
case 2:
options.c_cflag |= CSTOPB;
break;
default:
printf("Unsupported stop bits!/n");
return FALSE;
}
if(parity != 'n')
{
//修改控制模式,保证程序不会占用串口
options.c_cflag |= CLOCAL;
//修改控制模式,使得能够从串口中读取输入数据
options.c_cflag |= CREAD;
options.c_lflag &= ~(ICANON | ECHO | ECHOE);
options.c_iflag &= ~(IXON | IXOFF | IXANY);
options.c_lflag &= ~(ICANON | ECHO | ECHOE | ISIG); /*Input*/
options.c_oflag &= ~OPOST;
}
//有字符处理或经过TIME个0.1秒后返回
options.c_cc[VTIME] = 0;
options.c_cc[VMIN] = 0;
//如果发生数据溢出,接收数据,但是不再读取
tcflush(fd, TCIFLUSH);
//激活配置 (将修改后的termios数据设置到串口中)
if(tcsetattr(fd, TCSANOW, &options) != 0)
{
printf("Setup Serial error!\n");
return FALSE;
}
return 0;
}
//写数据函数
int Write_Data(int fd, void *buf, int len)
{
int m_fd = fd;
int write_count = 0;
int nwrite = 0;
if(m_fd <0)
{
printf("Please Open The Device File!\n");
}
while(len > 0)
{
nwrite = write(fd, (char*)buf + write_count, len);
if(nwrite < 1)
{
printf("Write Datda Fail!\n");
break;
}
write_count += nwrite;
len -= nwrite;
}
// 清除所有正在发生的I/O数据
tcflush(fd, TCIOFLUSH);
return write_count;
}
//读取数据
int Read_Data(int fd, char* buff)
{
int nread = 0;
int fd_max;
int nselect;
fd_set readfds;
FD_ZERO(&readfds);
FD_SET(fd,&readfds);
fd_max = fd+1;
nselect = select(fd_max, &readfds, NULL, NULL, NULL);
memset(buff, 0, sizeof(buff));
if(nselect <= 0)
printf("select failed");
else if(FD_ISSET(fd, &readfds) >0)
{
nread = read(fd, buff, 8);
buff[nread] = '\0';
}
int j = 0;
while(buff[j] != '\0')
{
printf("the readable data is 0x%x\n", buff[j]);
j++;
}
return nread;
}
//开启模块
int Open_LaserModule(int fd)
{
un_char Buff_Open[BUFF_MAXSIZE] = {0x80, 0x06, 0x05, 0x01, 0x74};
un_char Open_Succeeded[BUFF_MAXSIZE] = {0x80, 0x06, 0x85, 0x01, 0xF4};
un_char Open_Failed[BUFF_MAXSIZE] = {0x80, 0x06, 0x85, 0x00, 0xF5};
Write_Data(fd, Buff_Open, strlen(Buff_Open));
Read_Data(fd, Buff_Open);
if(strcmp(Buff_Open, Open_Succeeded) == 0)
{
printf("Open_LaserModule Succeeded!\n");
}else if(strcmp(Buff_Open, Open_Failed) == 0)
{
printf("Open_LaserModule Failed, Please Try Again!\n");
}else
{
printf("NG\n");
return FALSE;
}
return TRUE;
}
//关闭模块
int Close_LaserModule(int fd)
{
un_char Buff_Close[BUFF_MAXSIZE] = {0x80, 0x06, 0x05, 0x00, 0x75};
un_char Close_Succeeded[BUFF_MAXSIZE] = {0x80, 0x06, 0x85, 0x01, 0xF4};
un_char Close_Failed[BUFF_MAXSIZE] = {0x80, 0x06, 0x85, 0x00, 0xF5};
//要写的数据中间有0x00,因此把要的数据长度指定为5个字节,而不用strlen()函数计算长度
Write_Data(fd, Buff_Close, 5);
Read_Data(fd, Buff_Close);
if(strcmp(Buff_Close, Close_Succeeded) == 0)
{
printf("Close_LaserModule Succeeded!\n");
}else if(strcmp(Buff_Close, Close_Failed) == 0)
{
printf("Close_LaserModule Failed, Please Try Again!\n");
}else
{ printf("NG\n");
return FALSE;
}
return TRUE;
}
//读取参数
un_char* Read_Parameter(int fd, un_char* device_parameter)
{
un_char Buff_Read_Parameter[BUFF_MAXSIZE] = {0xFA, 0x06, 0x01, 0xFF};
Write_Data(fd, Buff_Read_Parameter, strlen(Buff_Read_Parameter));
Read_Data(fd, Buff_Read_Parameter);
printf("*******The parameter have read!**********\n");
strcpy(device_parameter, Buff_Read_Parameter);
return device_parameter;
}
//读取机器号,由于串口每次只能读取8个字节,而读取机器号的返回代码有20个字节,所以读取三次数据
un_char* Read_Device_Num(int fd, un_char* device_num)
{
int nread = 0;
un_char Buff_Read_DeviceNum[BUFF_MAXSIZE] = {0xFA, 0x06, 0x04, 0xFC};
un_char Buff_read_back[BUFF_MAXSIZE] = {0};
un_char *Buff_bp = Buff_read_back;
Write_Data(fd, Buff_Read_DeviceNum, strlen(Buff_Read_DeviceNum));
nread = Read_Data(fd, Buff_Read_DeviceNum);
memcpy(Buff_bp, Buff_Read_DeviceNum, nread);
Buff_bp += nread;
nread = Read_Data(fd, Buff_Read_DeviceNum);
memcpy(Buff_bp, Buff_Read_DeviceNum, nread);
Buff_bp += nread;
nread = Read_Data(fd, Buff_Read_DeviceNum);
strcpy(Buff_bp, Buff_Read_DeviceNum);
strcpy(device_num, Buff_read_back);
return device_num;
}
//设置地址
int Set_Address(int fd)
{
un_char Buff_Address[BUFF_MAXSIZE] = {0xFA, 0x04, 0x01, 0x80, 0x81};
un_char Address_Succeeded[BUFF_MAXSIZE] = {0xFA, 0x04, 0x81, 0x81};
un_char Address_Failed[BUFF_MAXSIZE] = {0xFA, 0x84, 0x81, 0x02, 0xFF};
Write_Data(fd, Buff_Address, strlen(Buff_Address));
Read_Data(fd, Buff_Address);
if(strcmp(Buff_Address, Address_Succeeded) == 0)
{
printf("Set_Address Succeeded!\n");
}else if(strcmp(Buff_Address, Address_Failed) == 0)
{
printf("Set Address Error, Please Write Again!\n");
}else
{ printf("NG\n");
return FALSE;
}
return TRUE;
}
//距离修改,参数decrease_or_increase表示修正可选为取负或者取正,参数distance表示要修正的距离
int Distance_Modification(int fd, int decrease_or_increase, int distance_int)
{
un_char decrease_increase = (un_char)decrease_or_increase;
un_char distance_ch = (un_char)distance_int;
int c_s = -250 - 4 - 6 - decrease_or_increase - distance_int;//十进制250表示十六进制0xFA
un_char cs = (un_char)c_s;
un_char Buff_Distance_Mo[BUFF_MAXSIZE] = {0};
Buff_Distance_Mo[0] = 0xFA;
Buff_Distance_Mo[1] = 0x04;
Buff_Distance_Mo[2] = 0x06;
Buff_Distance_Mo[3] = decrease_increase;
Buff_Distance_Mo[4] = distance_ch;
Buff_Distance_Mo[5] = cs;
Buff_Distance_Mo[6] = '\0';
un_char Distance_ModificationSd[BUFF_MAXSIZE] ={0xFA, 0x04, 0x8B, 0x77};
un_char Distance_ModificationFd[BUFF_MAXSIZE] ={0xFA, 0x84, 0x8B, 0x01, 0xF6};
Write_Data(fd, Buff_Distance_Mo, strlen(Buff_Distance_Mo));
Read_Data(fd, Buff_Distance_Mo);
if(strcmp(Buff_Distance_Mo, Distance_ModificationSd) == 0)
{
if(decrease_or_increase == 43)
printf("Distance_Increase_Modification_Succeeded\n");
else
printf("Distance_Decrease_Modification_Succeeded\n");
}else if(strcmp(Buff_Distance_Mo, Distance_ModificationFd) == 0)
{
if(decrease_or_increase == 43)
printf("Distance_Increase_Modification_Failed\n");
else
printf("Distance_Decrease_Modification_Failed\n");
}else
{
printf("NG\n");
return FALSE;
}
return TRUE;
}
//连续测量时设置数据返回时间间隔,参数interval_time_int表示要设定的时间间隔为interval_time_int秒
int Mea_Interval(int fd, int interval_time_int)
{
int c_s = -250 - 4 - 5 - interval_time_int;//十进制250表示十六进制0xFA
un_char cs = (un_char)c_s;
un_char interval_ch = (un_char)interval_time_int;
un_char Buff_Mea_Interval[BUFF_MAXSIZE] = {0};
Buff_Mea_Interval[0] = 0xFA;
Buff_Mea_Interval[1] = 0x04;
Buff_Mea_Interval[2] = 0x05;
Buff_Mea_Interval[3] = interval_ch;
Buff_Mea_Interval[4] = cs;
Buff_Mea_Interval[5] = '\0';
un_char Mea_IntervalSd[BUFF_MAXSIZE] = {0xFA, 0x04, 0x85, 0x7D};
un_char Mea_IntervalFd[BUFF_MAXSIZE] = {0xFA, 0x84, 0x85, 0x01, 0xFC};
un_char Write_IntervalErr[BUFF_MAXSIZE] = {0xFA, 0x84, 0x85, 0x01, 0xFA};
Write_Data(fd, Buff_Mea_Interval, strlen(Buff_Mea_Interval));
Read_Data(fd, Buff_Mea_Interval);
if(strcmp(Buff_Mea_Interval, Mea_IntervalSd) == 0)
{
printf("Mea_Interval_Succeeded\n");
}else if(strcmp(Buff_Mea_Interval, Mea_IntervalFd) == 0)
{
printf("Mea_Interval_Failed, Please Try Again!\n");
}else if(strcmp(Buff_Mea_Interval, Write_IntervalErr) == 0)
{
printf("Mea_Interval_Error\n");
}else
{
printf("NG\n");
return FALSE;
}
return TRUE;
}
//设置距离起止点,参数position_int的值(1顶端算起;0加上模块长度+上面的距离修正)
int Distance_StartStop(int fd, int position_int)
{
int c_s = -250 - 4 - 8 - position_int;//十进制250表示十六进制0xFA
un_char cs = (un_char)c_s;
un_char position_ch = (un_char)position_int;
un_char Buff_StartStop[BUFF_MAXSIZE] = {0};
Buff_StartStop[0] = 0xFA;
Buff_StartStop[1] = 0x04;
Buff_StartStop[2] = 0x08;
Buff_StartStop[3] = position_ch;
Buff_StartStop[4] = cs;
Buff_StartStop[5] = '\0';
un_char Mea_Distance_StartStopSd[BUFF_MAXSIZE] = {0xFA, 0x04, 0x88, 0x7A};
un_char Mea_Distance_StartStopFd[BUFF_MAXSIZE] = {0xFA, 0x84, 0x88, 0x01, 0xF9};
//要写的数据中间有0x00,因此把要的数据长度指定为5个字节,而不用strlen()函数计算长度
if(Buff_StartStop[3] == 0x00)
{
Write_Data(fd, Buff_StartStop, 5);
}
else
{
Write_Data(fd, Buff_StartStop, strlen(Buff_StartStop));
}
Read_Data(fd, Buff_StartStop);
if(strcmp(Buff_StartStop, Mea_Distance_StartStopSd) == 0)
{
printf("Mea_Distance_StartStop_Succeeded!\n");
}else if(strcmp(Buff_StartStop, Mea_Distance_StartStopFd) == 0)
{
printf("Write Mea_Distance_StartStop_Failed, Please Write Again!\n");
}else
{ printf("NG\n");
return FALSE;
}
return TRUE;
}
//设定量程,range表示要设定的量程大小05, 10, 30, 50, 80
int Set_MeasuringRange(int fd, int range)
{
un_char Buff_Range_05[BUFF_MAXSIZE] = {0xFA, 0x04, 0x09, 0x05, 0xF4};
un_char Buff_Range_10[BUFF_MAXSIZE] = {0xFA, 0x04, 0x09, 0x0A, 0xEF};
un_char Buff_Range_30[BUFF_MAXSIZE] = {0xFA, 0x04, 0x09, 0x1E, 0xDB};
un_char Buff_Range_50[BUFF_MAXSIZE] = {0xFA, 0x04, 0x09, 0x32, 0xC7};
un_char Buff_Range_80[BUFF_MAXSIZE] = {0xFA, 0x04, 0x09, 0x50, 0xA9};
un_char Set_MeasuringRangeSd[BUFF_MAXSIZE] ={0xFA, 0x04, 0x89, 0x79};
un_char Set_MeasuringRangeFd[BUFF_MAXSIZE] ={0xFA, 0x84, 0x89, 0x01, 0xF8};
int choose = range;
switch(choose)
{
case 5:
Write_Data(fd, Buff_Range_05, strlen(Buff_Range_05));
Read_Data(fd, Buff_Range_05);
if(strcmp(Buff_Range_05, Set_MeasuringRangeSd) == 0)
{
printf("Set_MeasuringRange_05_Succeeded\n");
}else if(strcmp(Buff_Range_05, Set_MeasuringRangeFd) == 0)
{
printf("Set_MeasuringRange_05_Failed, Please Try Again!\n");
}else
{
printf("NG\n");
return FALSE;
}
break;
case 10:
Write_Data(fd, Buff_Range_10, strlen(Buff_Range_10));
Read_Data(fd, Buff_Range_10);
if(strcmp(Buff_Range_10, Set_MeasuringRangeSd) == 0)
{
printf("Set_MeasuringRange_10_Succeeded\n");
}else if(strcmp(Buff_Range_10, Set_MeasuringRangeFd) == 0)
{
printf("Set_MeasuringRange_10_Failed, Please Try Again!\n");
}else
{
printf("NG\n");
return FALSE;
}
break;
case 30:
Write_Data(fd, Buff_Range_30, strlen(Buff_Range_30));
Read_Data(fd, Buff_Range_30);
if(strcmp(Buff_Range_30, Set_MeasuringRangeSd) == 0)
{
printf("Set_MeasuringRange_30_Succeeded\n");
}else if(strcmp(Buff_Range_30, Set_MeasuringRangeFd) == 0)
{
printf("Set_MeasuringRange_30_Failed, Please Try Again!\n");
}else
{
printf("NG\n");
return FALSE;
}
break;
case 50:
Write_Data(fd, Buff_Range_50, strlen(Buff_Range_50));
Read_Data(fd, Buff_Range_50);
if(strcmp(Buff_Range_50, Set_MeasuringRangeSd) == 0)
{
printf("Set_MeasuringRange_50_Succeeded\n");
}else if(strcmp(Buff_Range_50, Set_MeasuringRangeFd) == 0)
{
printf("Set_MeasuringRange_50_Failed, Please Try Again!\n");
}else
{
printf("NG\n");
return FALSE;
}
break;
case 80:
Write_Data(fd, Buff_Range_80, strlen(Buff_Range_80));
Read_Data(fd, Buff_Range_80);
if(strcmp(Buff_Range_80, Set_MeasuringRangeSd) == 0)
{
printf("Set_MeasuringRange_80_Succeeded\n");
}else if(strcmp(Buff_Range_80, Set_MeasuringRangeFd) == 0)
{
printf("Set_MeasuringRange_80_Failed, Please Try Again!\n");
}else
{
printf("NG\n");
return FALSE;
}
break;
default:
printf("Please Set The Correct Range Parameters!\n");
return FALSE;
}
return TRUE;
}
//设定频率,freg表示要设定的频率大小,00,05,10,20
int Set_Frequency(int fd, int freg)
{
un_char Buff_Frequency_00[BUFF_MAXSIZE] = {0xFA, 0x04, 0x0A, 0x00, 0xF8};
un_char Buff_Frequency_05[BUFF_MAXSIZE] = {0xFA, 0x04, 0x0A, 0x05, 0xF3};
un_char Buff_Frequency_10[BUFF_MAXSIZE] = {0xFA, 0x04, 0x0A, 0x0A, 0xEE};
un_char Buff_Frequency_20[BUFF_MAXSIZE] = {0xFA, 0x04, 0x0A, 0x14, 0xE4};
un_char Set_FrequencySd[BUFF_MAXSIZE] ={0xFA, 0x04, 0x8A, 0x78};
un_char Set_FrequencyFd[BUFF_MAXSIZE] ={0xFA, 0x84, 0x8A, 0x01, 0xF7};
un_char choose = freg;
switch(choose)
{
case 0:
Write_Data(fd, Buff_Frequency_00, 5);//要写的数据中间有0x00,因此把要的数据长度指定为5个字节,而不用strlen()函数计算长度
Read_Data(fd, Buff_Frequency_00);
if(strcmp(Buff_Frequency_00, Set_FrequencySd) == 0)
{
printf("Set_Frequency_00_Succeeded\n");
}else if(strcmp(Buff_Frequency_00, Set_FrequencyFd) == 0)
{
printf("Set_Frequency_00_Failed, Please Try Again!\n");
}else
{
printf("NG\n");
return FALSE;
}
break;
case 5:
Write_Data(fd, Buff_Frequency_05, strlen(Buff_Frequency_05));
Read_Data(fd, Buff_Frequency_05);
if(strcmp(Buff_Frequency_05, Set_FrequencySd) == 0)
{
printf("Set_Frequency_05_Succeeded\n");
}else if(strcmp(Buff_Frequency_05, Set_FrequencyFd) == 0)
{
printf("Set_Frequency_05_Failed, Please Try Again!\n");
}else
{
printf("NG\n");
return FALSE;
}
break;
case 10:
Write_Data(fd, Buff_Frequency_10, strlen(Buff_Frequency_10));
Read_Data(fd, Buff_Frequency_10);
if(strcmp(Buff_Frequency_10, Set_FrequencySd) == 0)
{
printf("Set_Frequency_10_Succeeded\n");
}else if(strcmp(Buff_Frequency_10, Set_FrequencyFd) == 0)
{
printf("Set_Frequency_10_Failed, Please Try Again!\n");
}else
{
printf("NG\n");
return FALSE;
}
break;
case 20:
Write_Data(fd, Buff_Frequency_20, strlen(Buff_Frequency_20));
Read_Data(fd, Buff_Frequency_20);
if(strcmp(Buff_Frequency_20, Set_FrequencySd) == 0)
{
printf("Set_Frequency_20_Succeeded\n");
}else if(strcmp(Buff_Frequency_20, Set_FrequencyFd) == 0)
{
printf("Set_Frequency_20_Failed, Please Try Again!\n");
}else
{
printf("NG\n");
return FALSE;
}
break;
default:
printf("Please Set The Correct Frequency Parameters!\n");
return FALSE;
}
return TRUE;
}
//设定分辨率,当mode=1表示设定的分辨率为1mm,当mode=2表示设定的分辨率为0.1mm;ZPOne为Zero_Point_One
int Set_Resolution(int fd, int mode)
{
un_char Buff_Resolution_One[BUFF_MAXSIZE] = {0xFA, 0x04, 0x0C, 0x01, 0xF5};
un_char Buff_Resolution_ZPOne[BUFF_MAXSIZE] = {0xFA, 0x04, 0x0C, 0x02, 0xF4};
un_char Set_ResolutionSd[BUFF_MAXSIZE] ={0xFA, 0x04, 0x8C, 0x76};
un_char Set_ResolutionFd[BUFF_MAXSIZE] ={0xFA, 0x84, 0x8C, 0x01, 0xF5};
int choose = mode;
//设定分辨率为1mm或者0.1mm
switch(choose)
{
case 1:
Write_Data(fd, Buff_Resolution_One, strlen(Buff_Resolution_One));
Read_Data(fd, Buff_Resolution_One);
if(strcmp(Buff_Resolution_One, Set_ResolutionSd) == 0)
{
printf("Set_One_mm_Resolution_Succeeded\n");
}else if(strcmp(Buff_Resolution_One, Set_ResolutionFd) == 0)
{
printf("Set_One_mm_Resolution_Failed, Please Try Again!\n");
}else
{
printf("NG\n");
return FALSE;
}
break;
case 2:
Write_Data(fd, Buff_Resolution_ZPOne, strlen(Buff_Resolution_ZPOne));
Read_Data(fd, Buff_Resolution_ZPOne);
if(strcmp(Buff_Resolution_ZPOne, Set_ResolutionSd) == 0)
{
printf("Set_ZPOne_mm_Resolution_Succeeded\n");
}else if(strcmp(Buff_Resolution_ZPOne, Set_ResolutionFd) == 0)
{
printf("Set_ZPOne_mm_Resolution_Failed, Please Try Again!\n");
}else
{
printf("NG\n");
return FALSE;
}
break;
default:
printf("Please Set The Correct Resolution Parameters!\n");
return FALSE;
}
return TRUE;
}
//设定上电即测,on_off=1表示开启该功能,on_off=0表示关闭该功能
int Measuring_Power(int fd,int on_off)
{
un_char Buff_Measuring_On[BUFF_MAXSIZE] = {0xFA, 0x04, 0x0D, 0x01, 0xF4};
un_char Buff_Measuring_Off[BUFF_MAXSIZE] = {0xFA, 0x04, 0x0D, 0x00, 0xF5};
un_char Measuring_PowerSd[BUFF_MAXSIZE] ={0xFA, 0x04, 0x8D, 0x75};
un_char Measuring_PowerFd[BUFF_MAXSIZE] ={0xFA, 0x84, 0x8D, 0x01, 0xF4};
int choose = on_off;
//选择是否开启上电即测
switch(choose)
{
case 0:
Write_Data(fd, Buff_Measuring_Off, 5);//要写的数据中间有0x00,因此把要的数据长度指定为5个字节,而不用strlen()函数计算长度
Read_Data(fd, Buff_Measuring_Off);
if(strcmp(Buff_Measuring_Off, Measuring_PowerSd) == 0)
{
printf("Measuring_Power_Off_Succeeded\n");
}else if(strcmp(Buff_Measuring_Off, Measuring_PowerFd) == 0)
{
printf("Measuring_Power_Off_Failed, Please Try Again!\n");
}else
{
printf("NG\n");
return FALSE;
}
break;
case 1:
Write_Data(fd, Buff_Measuring_On, strlen(Buff_Measuring_On));
Read_Data(fd, Buff_Measuring_On);
if(strcmp(Buff_Measuring_On, Measuring_PowerSd) == 0)
{
printf("Measuring_Power_On_Succeeded\n");
}else if(strcmp(Buff_Measuring_On, Measuring_PowerFd) == 0)
{
printf("Measuring_Power_On_Failed, Please Try Again!\n");
}else
{
printf("NG\n");
return FALSE;
}
break;
default:
printf("Please Set The Correct On_Off Mode Parameters!\n");
return FALSE;
}
return TRUE;
}
//单次测量(广播命令,返回结果存入模块缓存)
int Single_Measurement_Broadcast(int fd)
{
un_char Buff_Single_MeaBroadcast[BUFF_MAXSIZE] = {0xFA, 0x06, 0x06, 0xFA};
Write_Data(fd, Buff_Single_MeaBroadcast, strlen(Buff_Single_MeaBroadcast));
return TRUE;
}
//读取缓存
un_char* Read_Cache(int fd, un_char* cache_data)
{
int nread = 0;
un_char Buff_Read_Cache[BUFF_MAXSIZE] = {0x80, 0x06, 0x07, 0x73};
un_char Buff_Read_Back[BUFF_MAXSIZE] = {0};
un_char *Buff_bp = Buff_Read_Back;
Write_Data(fd, Buff_Read_Cache, strlen(Buff_Read_Cache));
nread = Read_Data(fd, Buff_Read_Cache);
memcpy(Buff_bp, Buff_Read_Cache, nread);
Buff_bp += nread;
nread = Read_Data(fd, Buff_Read_Cache);
strcpy(Buff_bp, Buff_Read_Cache);
//根据返回数据的位数及字符数组的的第四位数据(数组下标为[3])的值,3X的取值只能是0x30~0x3F(48~63), E(或者e)的大小为69(或者101),判断模块是否正确返回
if(strlen(Buff_Read_Back)==11 && Buff_Read_Back[3]>=48 && Buff_Read_Back[3]<=63)
{
printf("Read_Cache_on_1mm_Succeeded!\n");
}else if(strlen(Buff_Read_Back)==12 && Buff_Read_Back[3]>=48 && Buff_Read_Back[3]<=63)
{
printf("Read_Cache_on_0.1mm_Succeeded!\n");
}else if(Buff_Read_Back[3] == 69 ||Buff_Read_Back[3] == 101)
{
if(strlen(Buff_Read_Back)==11)
printf("Single_Measurement_on_1mm_Failed, Please Try Again!\n");
if(strlen(Buff_Read_Back)==12)
printf("Single_Measurement_on_0.1mm_Failed, Please Try Again!\n");
}else
{
printf("NG!\n");
return NULL;
}
strcpy(cache_data, Buff_Read_Back);
return cache_data;
}
//单次测量
un_char* Single_Measurement(int fd, un_char* single_mea)
{
int nread = 0;
un_char Buff_Single_Measurement[BUFF_MAXSIZE] = {0x80, 0x06, 0x02, 0x78};
un_char Buff_Read_Back[BUFF_MAXSIZE] = {0};
un_char *Buff_bp = Buff_Read_Back;
Write_Data(fd, Buff_Single_Measurement, strlen(Buff_Single_Measurement));
nread = Read_Data(fd, Buff_Single_Measurement);
memcpy(Buff_bp, Buff_Single_Measurement, nread);
Buff_bp += nread;
nread = Read_Data(fd, Buff_Single_Measurement);
strcpy(Buff_bp, Buff_Single_Measurement);
//根据返回数据的位数及字符数组的的第四位数据(数组下标为[3])的值,3X的取值只能是0x30~0x3F(48~63), E(或者e)的大小为69(或者101),判断模块是否正确返回
if(strlen(Buff_Read_Back)==11 && Buff_Read_Back[3]>=48 && Buff_Read_Back[3]<=63)
{
printf("Single_Measurement_on_1mm_Succeeded!\n");
}else if(strlen(Buff_Read_Back)==12 && Buff_Read_Back[3]>=48 && Buff_Read_Back[3]<=63)
{
printf("Single_Measurement_on_0.1mm_Succeeded!\n");
}else if(Buff_Read_Back[3] == 69 ||Buff_Read_Back[3] == 101)
{
if(strlen(Buff_Read_Back)==11)
printf("Single_Measurement_on_1mm_Failed, Please Try Again!\n");
if(strlen(Buff_Read_Back)==12)
printf("Single_Measurement_on_0.1mm_Failed, Please Try Again!\n");
}else
{
printf("NG!\n");
return NULL;
}
strcpy(single_mea, Buff_Read_Back);
return single_mea;
}
//连续测量
un_char* Continuous_Measurement(int fd, un_char* continuous_mea)
{
int nread = 0;
un_char Buff_Continuous_Measurement[BUFF_MAXSIZE] = {0x80, 0x06, 0x03, 0x77};
un_char Buff_Read_Back[BUFF_MAXSIZE] = {0};
un_char *Buff_bp = Buff_Read_Back;
Write_Data(fd, Buff_Continuous_Measurement, strlen(Buff_Continuous_Measurement));
nread = Read_Data(fd, Buff_Continuous_Measurement);
memcpy(Buff_bp, Buff_Continuous_Measurement, nread);
Buff_bp += nread;
nread = Read_Data(fd, Buff_Continuous_Measurement);
strcpy(Buff_bp, Buff_Continuous_Measurement);
//根据返回数据的位数及字符数组的的第四位数据(数组下标为[3])的值,3X的取值只能是0x30~0x3F(48~63), E(或者e)的大小为69(或者101),判断模块是否正确返回
if(strlen(Buff_Read_Back)==11 && Buff_Read_Back[3]>=48 && Buff_Read_Back[3]<=63)
{
printf("Continuous_Measurement_on_1mm_Succeeded!\n");
}else if(strlen(Buff_Read_Back)==12 && Buff_Read_Back[3]>=48 && Buff_Read_Back[3]<=63)
{
printf("Continuous_Measurement_on_0.1mm_Succeeded!\n");
}else if(Buff_Read_Back[3] == 69 ||Buff_Read_Back[3] == 101)
{
if(strlen(Buff_Read_Back)==11)
printf("Continuous_Measurement_on_1mm_Failed, Please Try Again!\n");
if(strlen(Buff_Read_Back)==12)
printf("Continuous_Measurement_on_0.1mm_Failed, Please Try Again!\n");
}else
{
printf("NG!\n");
return NULL;
}
strcpy(continuous_mea, Buff_Read_Back);
return continuous_mea;
}2.4 源码说明
①对于阻塞式读取模块返回的数据,当用串口发送指令访问模块时,模块不能及时得返回数据,如果采用非阻塞式读取数据,不一定会成功;
②串口一次只能读取8位数据,用串口读取多于8位的数据,多读几次就OK。
int readtime(int bit){
int n = bit;
int time = n/8;
if(n%8 == 0)
printf("read time is %d", time);
else
printf("read time is %d", time+1);
}在多次读取数据时需注意,例如,
nread = Read_Data(fd, Buff_Continuous_Measurement);
memcpy(Buff_bp, Buff_Continuous_Measurement, nread);//读取数据
Buff_bp += nread;
nread = Read_Data(fd, Buff_Continuous_Measurement);
strcpy(Buff_bp, Buff_Continuous_Measurement);从Buff_Continuous_Measurement缓存读取数据,为什么不用strcpy函数,而采用memcpy函数;memcpy函数与strcpy函数的区别在于,前者复制内存里的数据时结尾不会添加“\0”,而strcpy函数会自动添加;所以如果采用strcpy函数来读取数据,两次读取的数据结尾都会有一个“\0“,即整个数据中间多了一个“\0”,(我记得我当时用stcpy()函数是失败的)~
③对数据不存在非零情况,写的数据用strlen()函数;对于写数据中间有0x00(零)的情况时,直接采用指定的字节数读写,例如BBuff_Measuring_Off[BUFF_MAXSIZE] = {0xFA, 0x04, 0x0D, 0x00, 0xF5}; 写数据时指定5个字节Write_Data(fd, Buff_Measuring_Off, 5);
④对于通信成功,但恰遇到模块总返回操作失败的代码的问题,这个问题弄得我哭笑不得,时好时坏(某天操作一直成功,过几天操作一直失败),最后是因为模块的供电电压问题,这个就属于硬件问题了,只是告诉大家以后遇到这个问题该怎么去处理。















 2283
2283

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









