







研究问题:最近需要对九宫格里面的九幅图像做出识别,判断哪一个格子里面的图片才是最特殊的,而其他图片是相似的,即其他八个格子里的图可以看作是一图作旋转,增添,缩放,镜像等操作,就像下面这样:

图1.右下角的小人是要找的目标图像,其他的小车可看作有其中一幅旋转平移等操作得到
我的思路是先对这个图片进行分割,分割成9幅小图,再对每一幅图片求特征表示及描述,根据这些图的特点,选择了一个比较简单的衡量图像特征的区域描述子--Hu矩。
下面详细叙述Hu矩的不变性:
在黎曼积分意义下,将二维(p+q)阶矩定义为:

可以看作是一个密度分布函数,在这里我们研究的对象是一幅图,其分布函数区间为
[ 0, 255]。
相应的(p+q)阶中心矩则定义如下:

其中

将积分符号换成求和符号会比较助于理解,但是为了保持证明的完整性,仍然保留积分符号考虑整个实数域。
①中心距对于的平移具有不变性:
假如新的坐标为:

易知和
的中心距是相同的。
②矩对于缩放具有不变性:

可以看作是(x, y)分别乘于系数α得到,对于每一个α系数由公式(2),有:
(6)
因为α是个常数,那么变换前后的中心距有这样的关系:

最后可以得到:

这也可以称为相似矩不变性。
③矩对于旋转具有不变性:
旋转矩阵的模为1。
将(9)和(10)跟公式(2)结合,也可以得到和
的关系,这可以称为正交不变性。
上述这些只是数学上的简单说明,论证的是图像矩的不变性,对于实际的应用,更常用的是用二阶矩和三阶矩构造出的7个不变矩组:
首先,对中心矩进行归一化:
, 其中
,p+q = 2,3......。 (11)
那么,存在7个不变矩组为:
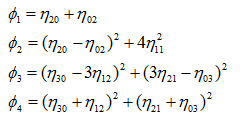

这些矩组对于平移、尺度变化、镜像(内部为负号)和旋转是不变的。
为了解决一开始提出的问题,就简单地写了一个程序:
<pre name="code" class="cpp">void calcHu(Mat image)
{
int bmpWidth = image.cols;
int bmpHeight = image.rows;
int bmpStep = image.step;
int bmpChannels = image.channels();
uchar* pBmpBuf = image.data;
double m00=0,m11=0,m20=0,m02=0,m30=0,m03=0,m12=0,m21=0; //中心矩
double x0=0,y0=0; //计算中心距时所使用的临时变量(x-x')
double u20=0,u02=0,u11=0,u30=0,u03=0,u12=0,u21=0; //规范化后的中心矩
double t1=0,t2=0,t3=0,t4=0,t5=0;//临时变量
int Center_x=0,Center_y=0;//重心
int i,j; //循环变量
// 获得图像的区域重心(普通矩)
double s10=0,s01=0,s00=0; //0阶矩和1阶矩
for(j=0;j<bmpHeight;j++)//y
{
for(i=0;i<bmpWidth;i++)//x
{
s10+=i*pBmpBuf[j*bmpStep+i];
s01+=j*pBmpBuf[j*bmpStep+i];
s00+=pBmpBuf[j*bmpStep+i];
}
}
Center_x=(int)(s10/s00+0.5);
Center_y=(int)(s01/s00+0.5);
// 计算二阶、三阶矩(中心矩)
m00=s00;
for(j=0;j<bmpHeight;j++)
{
for(i=0;i<bmpWidth;i++)//x
{
x0=(i-Center_x);
y0=(j-Center_y);
m11+=x0*y0*pBmpBuf[j*bmpStep+i];
m20+=x0*x0*pBmpBuf[j*bmpStep+i];
m02+=y0*y0*pBmpBuf[j*bmpStep+i];
m03+=y0*y0*y0*pBmpBuf[j*bmpStep+i];
m30+=x0*x0*x0*pBmpBuf[j*bmpStep+i];
m12+=x0*y0*y0*pBmpBuf[j*bmpStep+i];
m21+=x0*x0*y0*pBmpBuf[j*bmpStep+i];
}
}
// 计算规范化后的中心矩: mij/pow(m00,((i+j+2)/2)
u20=m20/pow(m00,2);
u02=m02/pow(m00,2);
u11=m11/pow(m00,2);
u30=m30/pow(m00,2.5);
u03=m03/pow(m00,2.5);
u12=m12/pow(m00,2.5);
u21=m21/pow(m00,2.5);
// 计算中间变量
t1=(u20-u02);
t2=(u30-3*u12);
t3=(3*u21-u03);
t4=(u30+u12);
t5=(u21+u03);
// 计算不变矩
M[0]=u20+u02;
M[1]=t1*t1+4*u11*u11;
M[2]=t2*t2+t3*t3;
M[3]=t4*t4+t5*t5;
M[4]=t2*t4*(t4*t4-3*t5*t5)+t3*t5*(3*t4*t4-t5*t5);
M[5]=t1*(t4*t4-t5*t5)+4*u11*t4*t5;
M[6]=t3*t4*(t4*t4-3*t5*t5)-t2*t5*(3*t4*t4-t5*t5);
}完整的程序如下:
#include <opencv2/opencv.hpp>
#include <ctime>
using namespace std;
using namespace cv;
double M[7] = {0};
vector<Mat> cutImage(Mat image)
{
vector<Mat> roi;
int rwidth = image.cols/3;
int rheight = image.rows/3;
for (int y = 0;y < image.rows-10;y +=rheight)
{
for (int x = 0;x < image.cols-10;x += rwidth)
{
Rect rect(x, y, rwidth, rheight);
rect &= Rect(0, 0, image.cols, image.rows);;
roi.push_back(image(rect));
}
}
return roi;
}
void calcHu(Mat image)
{
int bmpWidth = image.cols;
int bmpHeight = image.rows;
int bmpStep = image.step;
int bmpChannels = image.channels();
uchar* pBmpBuf = image.data;
double m00=0,m11=0,m20=0,m02=0,m30=0,m03=0,m12=0,m21=0; //中心矩
double x0=0,y0=0; //计算中心距时所使用的临时变量(x-x')
double u20=0,u02=0,u11=0,u30=0,u03=0,u12=0,u21=0; //规范化后的中心矩
double t1=0,t2=0,t3=0,t4=0,t5=0;//临时变量
int Center_x=0,Center_y=0;//重心
int i,j; //循环变量
// 获得图像的区域重心(普通矩)
double s10=0,s01=0,s00=0; //0阶矩和1阶矩
for(j=0;j<bmpHeight;j++)//y
{
for(i=0;i<bmpWidth;i++)//x
{
s10+=i*pBmpBuf[j*bmpStep+i];
s01+=j*pBmpBuf[j*bmpStep+i];
s00+=pBmpBuf[j*bmpStep+i];
}
}
Center_x=(int)(s10/s00+0.5);
Center_y=(int)(s01/s00+0.5);
// 计算二阶、三阶矩(中心矩)
m00=s00;
for(j=0;j<bmpHeight;j++)
{
for(i=0;i<bmpWidth;i++)//x
{
x0=(i-Center_x);
y0=(j-Center_y);
m11+=x0*y0*pBmpBuf[j*bmpStep+i];
m20+=x0*x0*pBmpBuf[j*bmpStep+i];
m02+=y0*y0*pBmpBuf[j*bmpStep+i];
m03+=y0*y0*y0*pBmpBuf[j*bmpStep+i];
m30+=x0*x0*x0*pBmpBuf[j*bmpStep+i];
m12+=x0*y0*y0*pBmpBuf[j*bmpStep+i];
m21+=x0*x0*y0*pBmpBuf[j*bmpStep+i];
}
}
// 计算规范化后的中心矩: mij/pow(m00,((i+j+2)/2)
u20=m20/pow(m00,2);
u02=m02/pow(m00,2);
u11=m11/pow(m00,2);
u30=m30/pow(m00,2.5);
u03=m03/pow(m00,2.5);
u12=m12/pow(m00,2.5);
u21=m21/pow(m00,2.5);
// 计算中间变量
t1=(u20-u02);
t2=(u30-3*u12);
t3=(3*u21-u03);
t4=(u30+u12);
t5=(u21+u03);
// 计算不变矩
M[0]=u20+u02;
M[1]=t1*t1+4*u11*u11;
M[2]=t2*t2+t3*t3;
M[3]=t4*t4+t5*t5;
M[4]=t2*t4*(t4*t4-3*t5*t5)+t3*t5*(3*t4*t4-t5*t5);
M[5]=t1*(t4*t4-t5*t5)+4*u11*t4*t5;
M[6]=t3*t4*(t4*t4-3*t5*t5)-t2*t5*(3*t4*t4-t5*t5);
}
int compareHu(double mo[9][7])
{
int no = 0;
double sum = 0, min = 100, max = 0;
for (int i = 0;i<9;i++)
{
sum += mo[i][0];
if(mo[i][0]>max)
max = mo[i][0];
if(mo[i][0]<min)
min = mo[i][0];
}
sum /= 9;
if(sum - min > max - sum) max = min;
for (int i = 0;i<9;i++)
if (mo[i][0]==max){ no = i;break;}
//cout<<max<<endl<<no<<endl;
return no;
}
void drawCross(int n, Mat image)
{
int centerx = 0, centery = 0, widstep = 0, heistep = 0;
widstep = image.cols/6;
heistep = image.rows/6;
centerx = n%3 * widstep * 2 + widstep;
centery = n/3 * heistep * 2 + heistep;
Scalar color(0, 0, 255);
line(image, Point(centerx-20, centery), Point(centerx+20, centery), color, 2);
line(image, Point(centerx, centery-10), Point(centerx, centery+10), color, 2);
}
int main()
{
Mat src, binary;
vector <Mat> srcRoi;
int count = 12;
double moment[9][7] = {0};
while (--count)
{
char imageName[10];
sprintf_s(imageName, "%d.jpg", count);
src = imread(imageName, 1);
Canny(src, binary, 50, 100);
srcRoi = cutImage(binary);
for (int i = 0;i < 9;i++)
{
calcHu(srcRoi[i]);
for (int j = 0;j<7;j++)
moment[i][j] = M[j];
}
int no = compareHu(moment);
drawCross(no, src);
imshow(imageName, src);
waitKey(0);
}
return 0;
}总结:Hu不变矩是一个比较简单而且有效的特征描述子,需要注意的是,要计算的图片最好是处理过的边缘图或者轮廓图,这能提高鲁棒性,但是,相比其他匹配算法如SURF来说,Hu矩的局限也很大,它受图片的质量影响比较大,可以说,Hu矩作为特征描述子的用途比较大,但是其他地方不考虑直接用这一算法。















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









