






1d人工势场法路径规划matlab代码
自己手写的人工势场法路径规划matlab代码,通过设定目标点和起始点,人工势场法进行路径规划,机械臂末端按照规划好的路径移动。
通过修改参数可实现最佳配置
ID:487740584234511
大大22812G
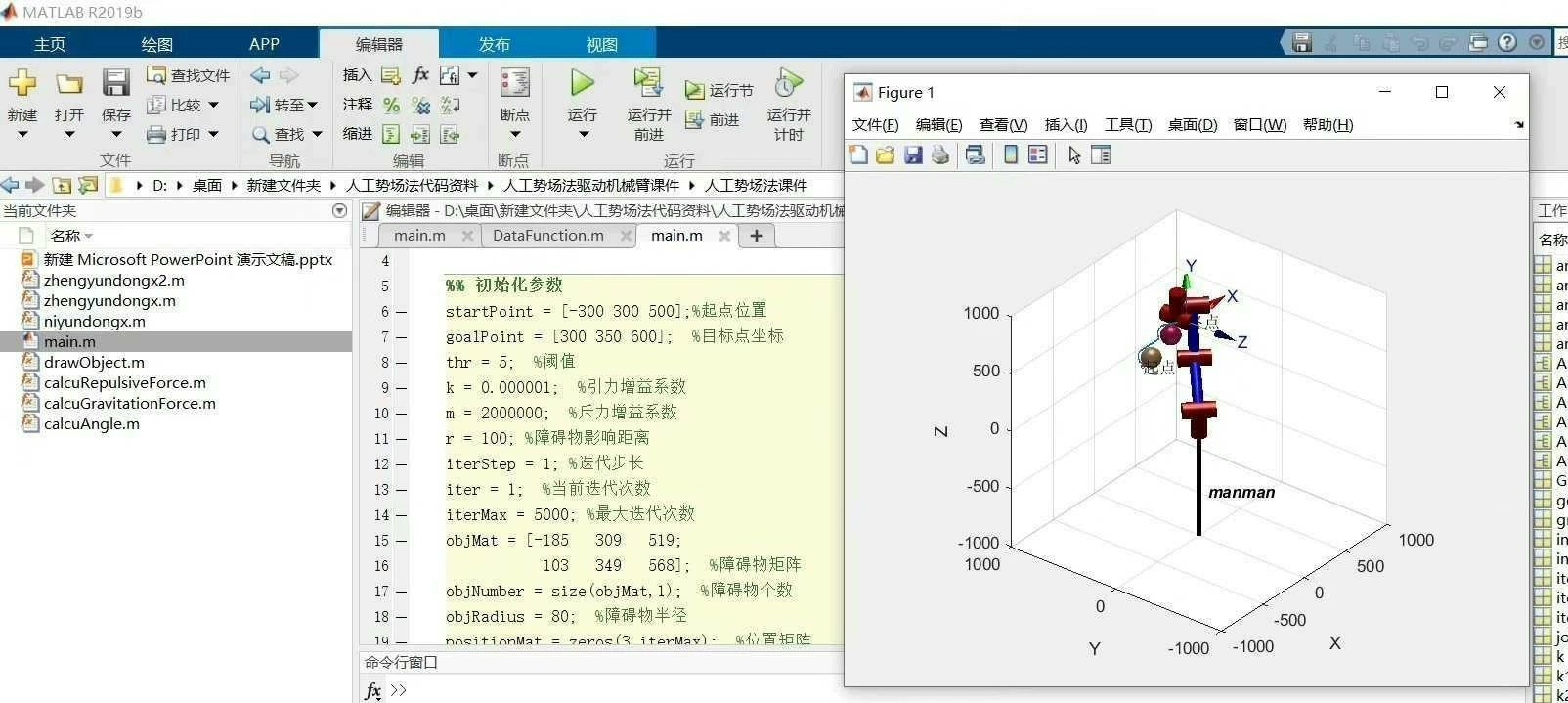
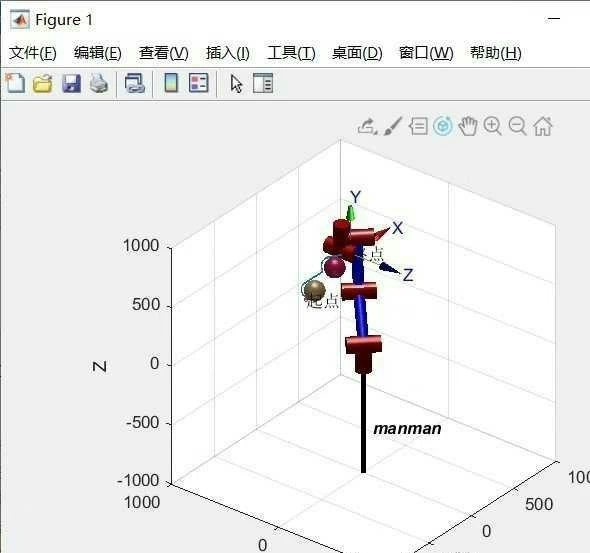
人工势场法(Artificial Potential Field Method,APF)是一种常用的路径规划算法,通过模拟物体受力和运动的方式,实现在复杂环境中路径的规划和机器人运动控制。本文介绍了自己手写的人工势场法路径规划MATLAB代码,并通过设定目标点和起始点,实现了机械臂末端按照规划好的路径移动。同时,通过修改参数来实现最佳配置。
首先,人工势场法是一种基于潜能场的路径规划方法。在该方法中,机器人被看作自由移动的物体,而其周围的环境则被建模为一个由势能构成的场。该场的势能分为吸引势和斥力势,吸引势使机器人朝目标点移动,而斥力势则使机器人避开障碍物和危险区域。
在本文中,我们通过手写MATLAB代码实现了人工势场法路径规划。首先,我们定义了起始点和目标点的坐标,并初始化机器人当前位置。然后,我们设置了吸引势和斥力势的参数。吸引势的参数决定了机器人受到目标点吸引的力大小,而斥力势的参数决定了机器人避开障碍物和危险区域的力大小。
接下来,我们在MATLAB代码中实现了人工势场法的路径规划算法。首先,我们计算了机器人当前位置到目标点的距离,并根据吸引势的参数计算出受到的吸引力。然后,我们计算了机器人当前位置到障碍物的距离,并根据斥力势的参数计算出受到的斥力。最后,我们将吸引力和斥力叠加,得到机器人在当前位置受到的总力,并根据总力的方向和大小计算机器人下一步的移动方向和距离。
通过不断迭代计算机器人的移动方向和距离,我们最终可以得到机器人从起始点到目标点的路径。为了实现最佳配置,我们可以通过修改参数来调整吸引势和斥力势的大小。例如,增大吸引势的参数可以使机器人更快地移向目标点,而增大斥力势的参数可以使机器人更远离障碍物和危险区域。
总结来说,本文介绍了人工势场法路径规划的MATLAB代码实现,并通过设定起始点和目标点,使机械臂根据规划好的路径移动。通过修改参数,我们可以实现最佳配置,使机器人在复杂环境中高效地完成路径规划和运动控制。人工势场法是一种灵活可调的路径规划方法,可以广泛应用于机器人导航、无人机飞行等领域。希望本文能为读者提供一种新的路径规划思路,并为实际应用提供参考。
【相关代码,程序地址】:http://fansik.cn/740584234511.html

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









