






徽标编程是一种基本的编程语言,可以使用基本命令创建形状和数字。它被介绍给孩子们,让他们对编程有一个基本的了解。
在Python中,我们可以使用turtle 库来处理模拟Logo编程语言的海龟图形。这个预装的库可以让我们用像Logo编程一样的简单命令来创建和处理海龟图形。
本教程将讨论一些Python中的海龟图形的例子。
1.在Python中为图形输出创建一个屏幕
我们从创建输出的屏幕开始。turtle.getscreen() 方法将一个变量初始化为屏幕,然后弹出一个屏幕。
这个变量被改变,输出就在屏幕上形成。然后我们需要用turtle.Turtle() 构造函数初始化Turtle 对象,以便在屏幕上绘图。
一些可以用上述对象移动乌龟的基本函数是:forward() ,right() ,left() ,和backward() 。这些函数的简写版本也可以分别作为fd(),rt(),lt(), 和bk() 。
forward() 和backward() 函数将分别向上和向下移动乌龟,而right() 和left() 函数将把乌龟旋转到一个给定的角度。
我们可以使用这些函数与循环和条件语句来创建不同的形状和数字。让我们看看下面的内容。
2.在Python中使用Turtle() 创建一个正方形
创建一个正方形是一个相对简单的任务。我们将迭代一个循环四次。
乌龟将在每次迭代中移动一个特定的距离,并向左或向右转90度。
请看下面的代码。
import turtle
obj = turtle.Turtle()
for i in range(4):
obj.forward(100)
obj.right(90)
turtle.done()
输出:
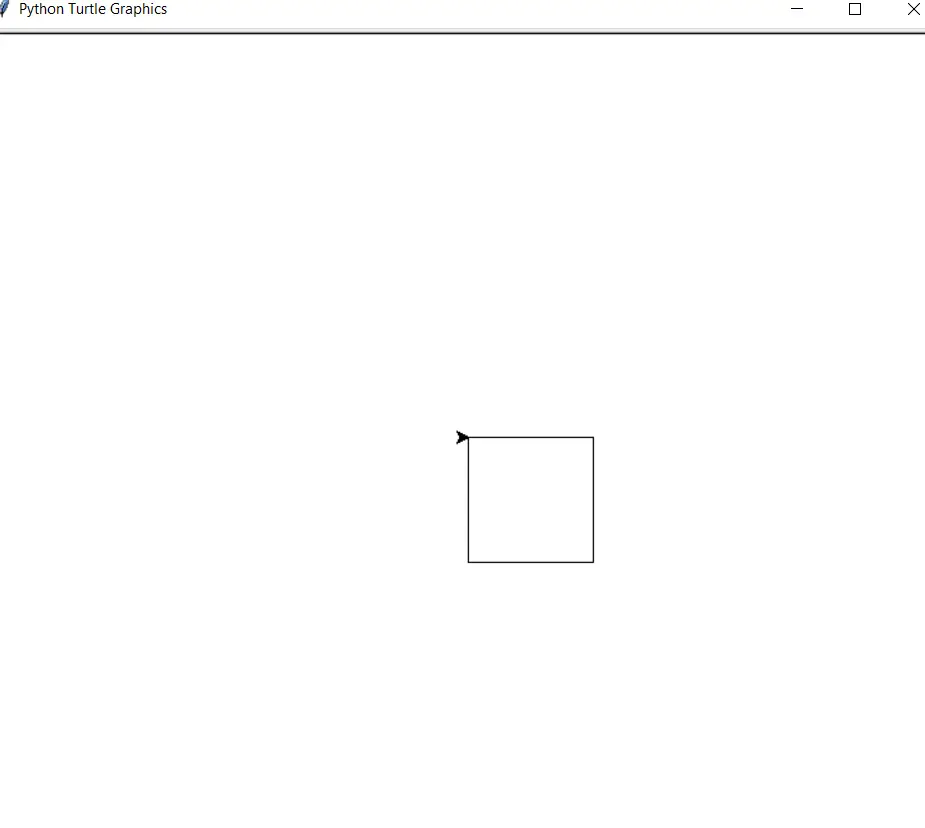
在上面的例子中,我们初始化了一个Turtle 对象,并通过简单地运行几次循环,用forward() 函数移动乌龟,用right() 函数转动它,创建了一个正方形。
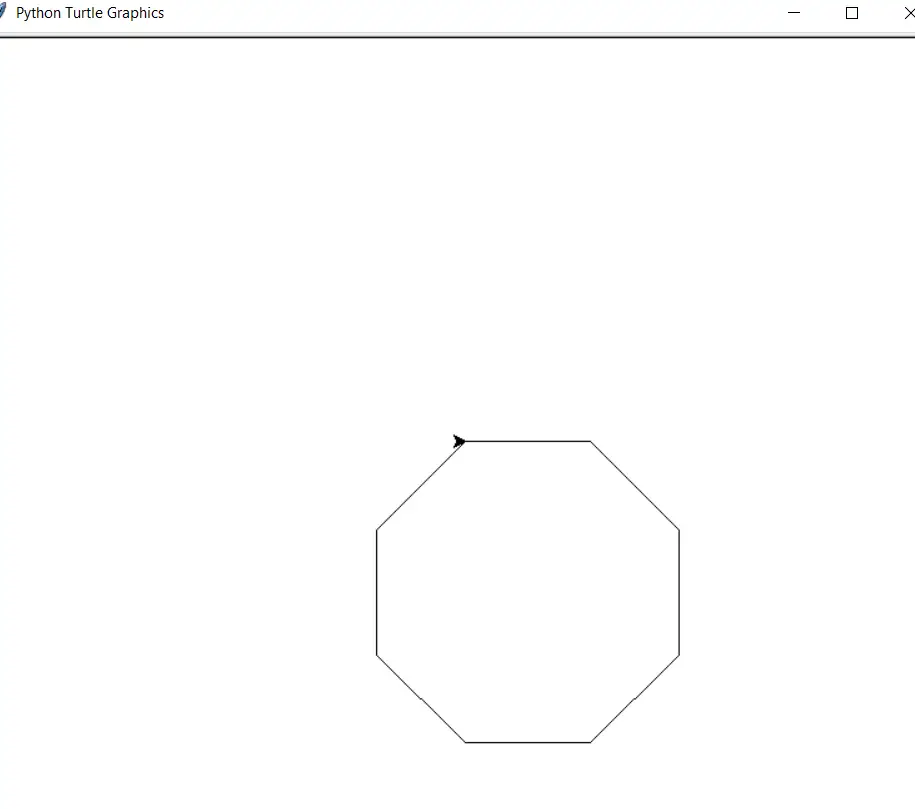
3.在Python中使用Turtle() 创建一个八角形
我们必须将乌龟旋转到所需的角度,并在循环中迭代八次来创建一个八角形。我们可以通过用360除以边数来计算旋转所需的角度,在本例中是8。
请看下面的代码。
import turtle
obj = turtle.Turtle()
angle = 360.0 / 8
for i in range(8):
obj.forward(100)
obj.right(angle)
turtle.done()
输出:
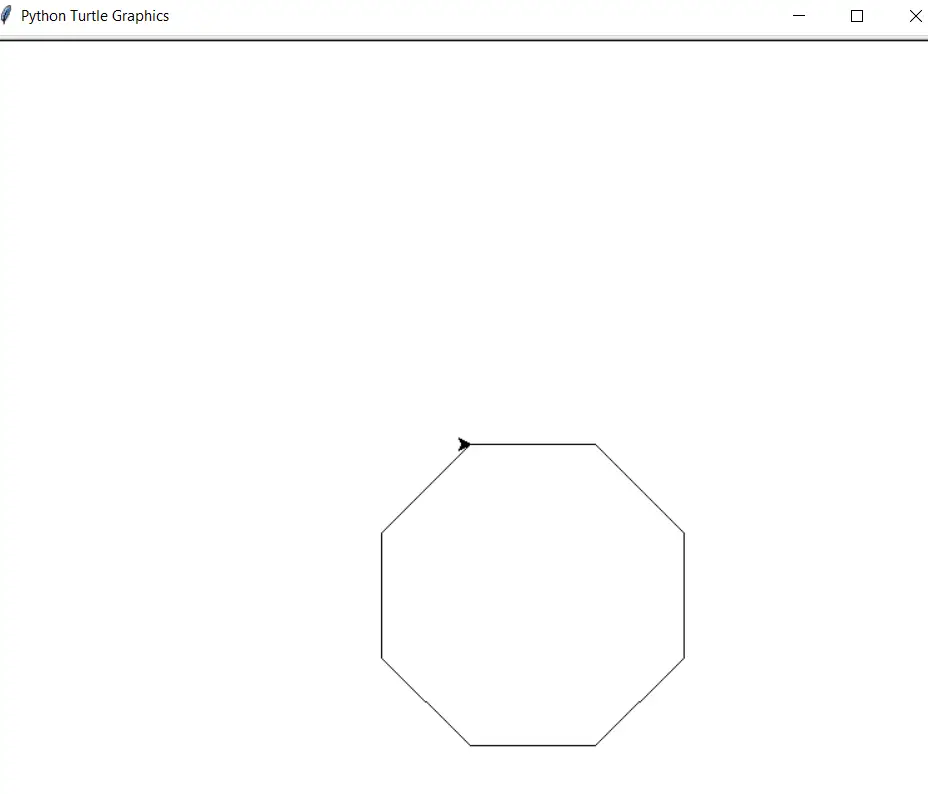
4.在Python中使用Turtle() 创建一个六边形
同样地,通过重复循环六次并将乌龟旋转60度(360/6),可以创建一个六边形。
例子:
import turtle
obj = turtle.Turtle()
angle = 360.0 / 6
for i in range(6):
obj.forward(100)
obj.right(angle)
turtle.done()
输出:
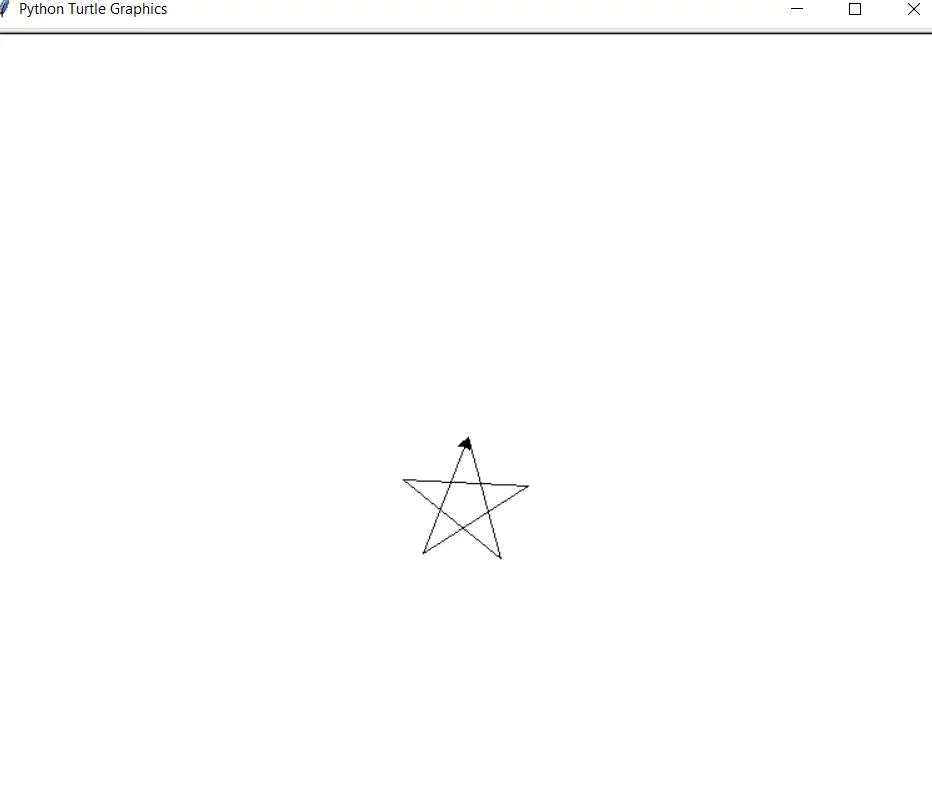
5.在Python中使用Turtle() 创建一个星形
星形是一个比前面讨论的更复杂的图形。我们将首先把乌龟旋转到75度并向前移动。
然后,这将被迭代四次,将其旋转到144度角,并移动相同的距离。
请看下面的代码。
import turtle
obj = turtle.Turtle()
obj.right(75)
obj.forward(100)
for i in range(4):
obj.right(144)
obj.forward(100)
turtle.done()
输出:
6.在Python中使用Turtle() 创建一个圆
turtle 库有一些预先建立的函数,可以直接创建形状。
circle() 函数可以使用海龟图形创建一个圆。我们只需要在函数中指定圆的半径。
例子:
import turtle
obj = turtle.Turtle()
obj.circle(100)
turtle.done()
输出:
7.Python中Turtle库的其他有用函数
我们可以编辑产生输出的屏幕。要改变背景颜色,我们使用turtle.bgcolor() 函数,要在屏幕上添加一个标题,我们使用turtle.title() 函数。
我们还可以使用turtle.shapesize() 和turtle.fillcolor() 函数控制海龟的大小和颜色。
我们在下面的代码中使用之前讨论过的函数。
import turtle
obj = turtle.Turtle()
turtle.title('DelftStack')
turtle.bgcolor('red')
obj.shapesize(3,3,3)
obj.fillcolor('blue')
turtle.done()
输出:
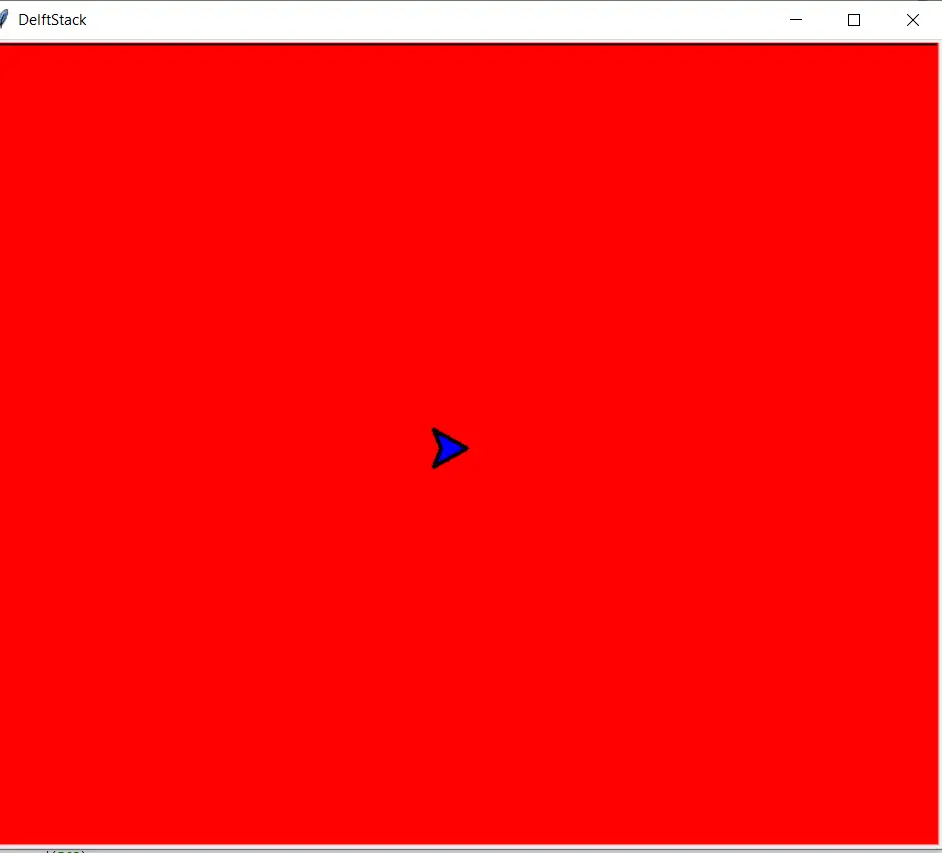
可以看到,乌龟的形状和颜色都发生了变化。另外,屏幕上有一个红色的背景,窗口上有一个标题。
我们可以通过turtle.shape() 函数来改变乌龟的形状。
为了控制屏幕上笔画的大小和颜色,我们使用turtle.pensize() 和turtle.pencolor() 函数。
例子:
#Python小白学习交流群:711312441
import turtle
obj = turtle.Turtle()
obj.pensize(5)
obj.pencolor('red')
obj.forward(100)
turtle.done()
输出:
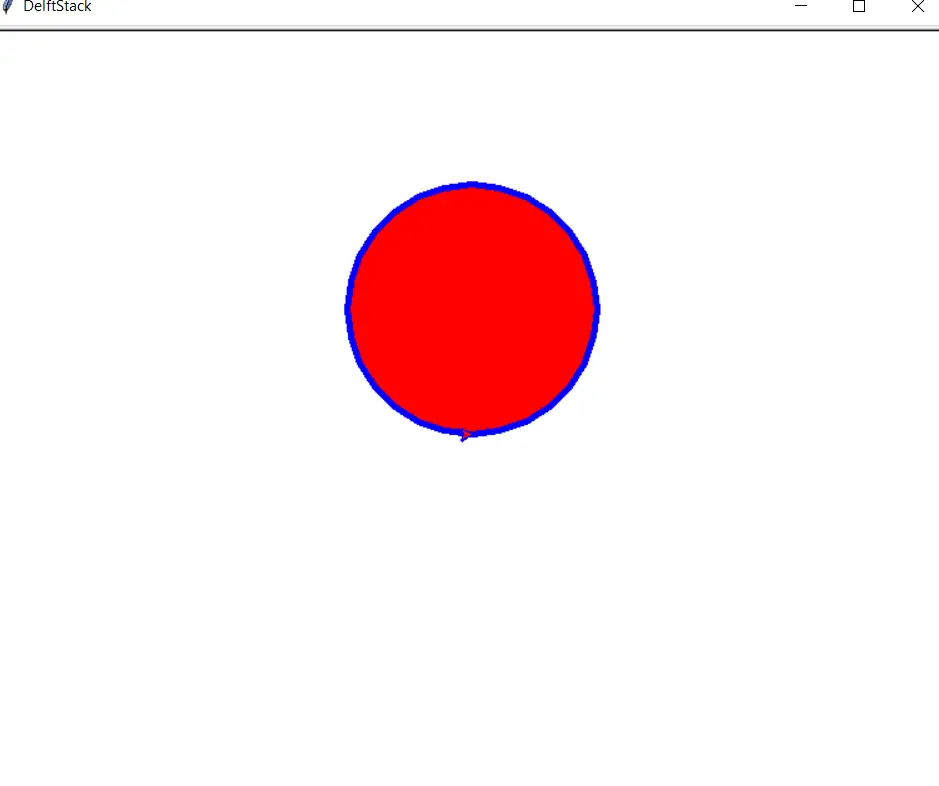
在上面的例子中,我们可以看到,笔的大小被放大了五倍,颜色也被改变了。pen() 函数可以在一个函数中控制前面讨论的属性。
这个函数可以使用pencolor,pensize,fillcolor, 和speed 参数。fillcolor 属性将用一些颜色填充创建的形状。
speed 属性控制笔的移动速度。
请看下面的代码。
import turtle
obj = turtle.Turtle()
obj.pen(pensize=5, pencolor = 'blue', fillcolor = 'red', speed = 10)
obj.begin_fill()
obj.circle(100)
obj.end_fill()
turtle.done()
输出:
这篇文章讨论了在Python中使用turtle 库的海龟图形的基础知识。















 2236
2236











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









