







目录
概述
本文主要是使用AT32F403A开发板,基于V2库串口1 printf输出功能,printf主要用于输出log信息,后续的基本都会使用到。
串口工具使用的Atlink-ez自带的串口功能。
工程建立、调试工具配置在前面章节有详细介绍。
硬件
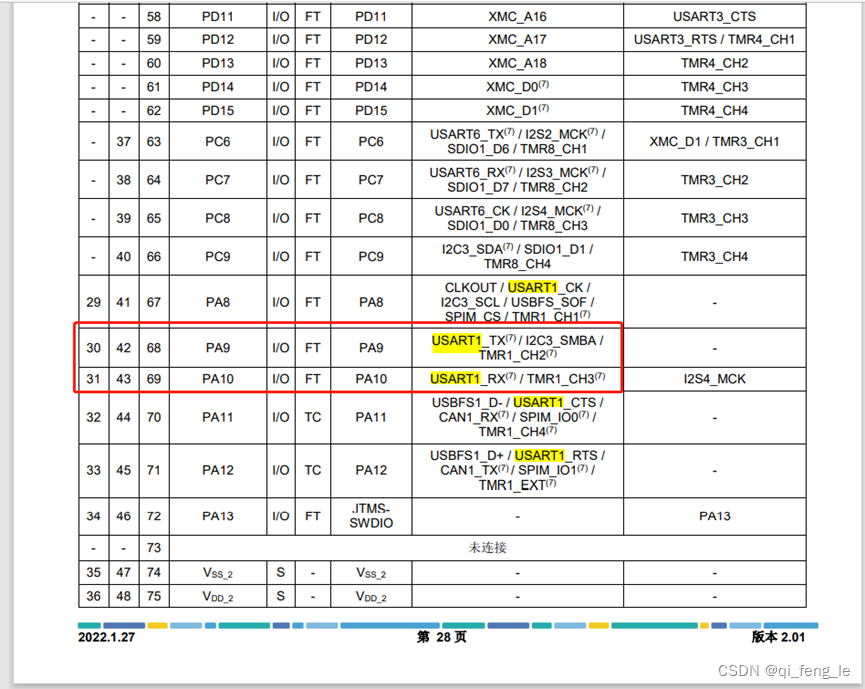
硬件方面使用的是参考官方AT32F437 SURF板子而设计的一个AT32F403A开发板,板子上的芯片是AT32F403AVGT7的型号,开发板上面还板载了一个atlink-ez的仿真器,atlink-ez除了可以在线仿真和下载之外还有一个串口的功能,硬件上是通过跳线帽接到了MCU的串口1,pa9/10上面。
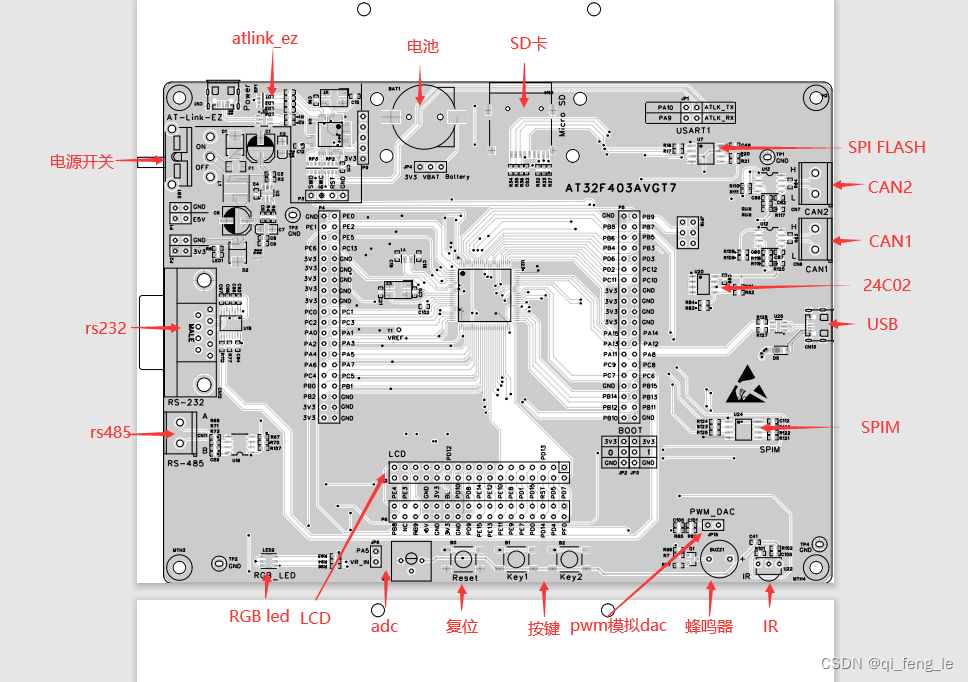
如下图是开发板pcb图,以及硬件资源。(左边上角的就是atlink-ez,用usb线接到pc即可):
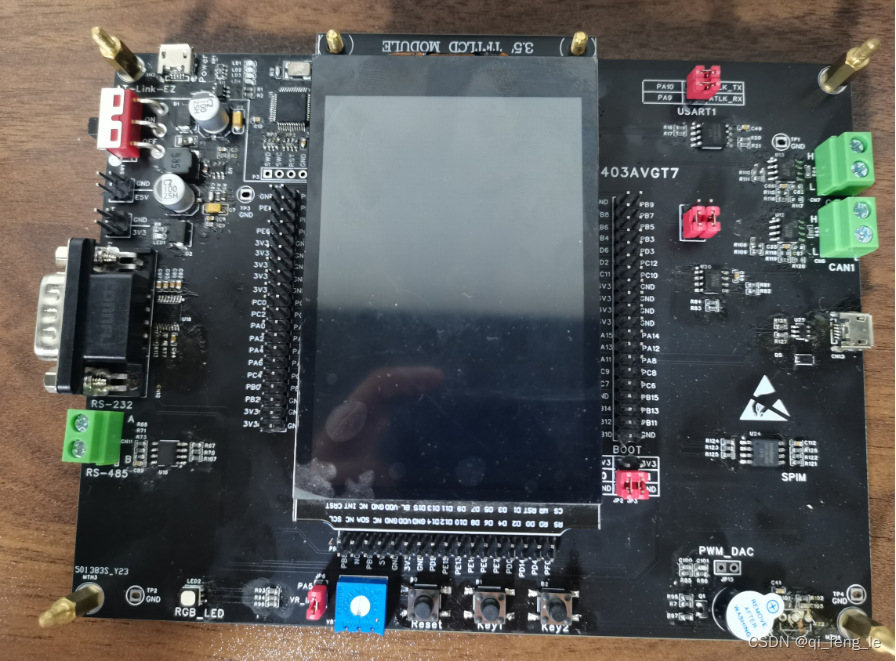
如下是实物图:
本章的主要内容是使用串口1的PA9输出打印信息,相关原理图部分:

软件
初始化串口1、gpio
通过串口1来使用printf功能,则先需要初始化串口1,并且使能串口发送,然后再配置重映射函数才能正常工作。
串口的初始化包括gpio的初始化以及串口的初始化,串口1使用默认的IO,PA9/PA10。一般当IO作为外设输出的时候设置为复用推挽输出功能,输入的设置为浮空输入或者上下拉输入模式。
如图是IO的分布:
由于printf的功能仅使用到输出,也就是tx,所以IO上只初始化PA9,以及使能输出即可,串口配置为115200波特率,数据位8,停止位1。
串口的初始化这个库都封装好了函数,对应着添加参数就可以使用了。
相关代码:
void usart1_printf(void)
{
gpio_init_type gpio_init_struct;
/*Enable the UART Clock*/
crm_periph_clock_enable(CRM_GPIOA_PERIPH_CLOCK, TRUE); //开启GPIOA的时钟
crm_periph_clock_enable(CRM_USART1_PERIPH_CLOCK, TRUE); //开启USART1的时钟
gpio_default_para_init(&gpio_init_struct);
/* Configure the UART1 TX pin */
gpio_init_struct.gpio_drive_strength = GPIO_DRIVE_STRENGTH_STRONGER; //较大电流推动/吸入能力
gpio_init_struct.gpio_out_type = GPIO_OUTPUT_PUSH_PULL; //推挽输出
gpio_init_struct.gpio_mode = GPIO_MODE_MUX; //复用
gpio_init_struct.gpio_pins = GPIO_PINS_9; //pa9
gpio_init_struct.gpio_pull = GPIO_PULL_NONE; //无上下拉
gpio_init(GPIOA, &gpio_init_struct);
usart_init(USART1, 115200, USART_DATA_8BITS, USART_STOP_1_BIT); //串口1,115200波特率,8数据位,1停止位
usart_hardware_flow_control_set(USART1,USART_HARDWARE_FLOW_NONE); //无硬件流操作
usart_parity_selection_config(USART1,USART_PARITY_NONE); //无校验
usart_transmitter_enable(USART1, TRUE); //使能发送
usart_enable(USART1, TRUE); //使能串口1
}
重映射printf
要使用printf 则需要开启重映射功能以及把头文件“stdio.h”(这是标准库的输出函数)包含进来,后面直接使用printf函数,即可输出要输出的数据。 要开启重映射有两种方式:使用keil的microlib以及不使用microlib。
使用microlib
添加相关代码:
#if defined ( __GNUC__ ) && !defined (__clang__)
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
/**
* @brief retargets the c library printf function to the usart.
* @param none
* @retval none
*/
PUTCHAR_PROTOTYPE
{
while(usart_flag_get(USART1, USART_TDBE_FLAG) == RESET);
usart_data_transmit(USART1, ch);
return ch;
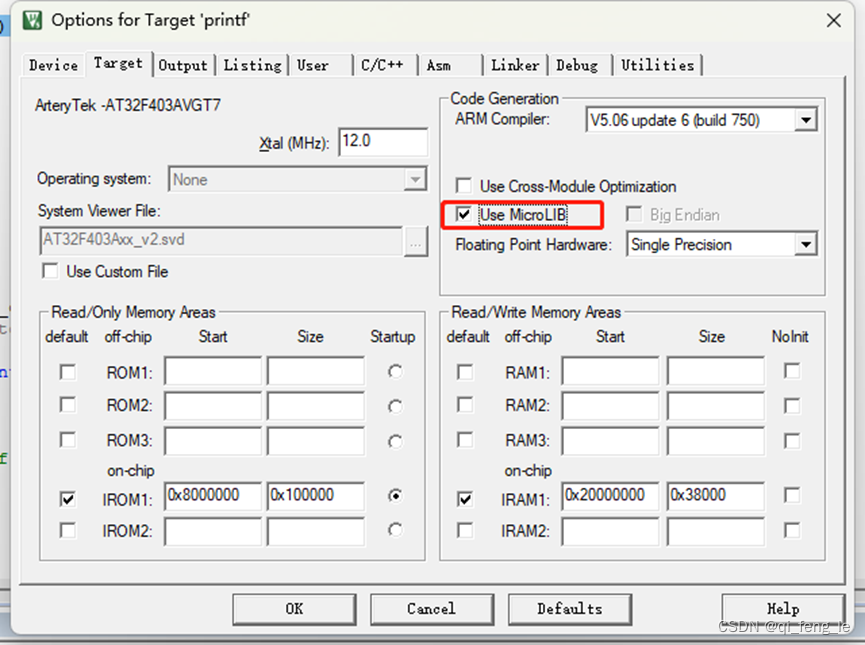
}keil配置中选择microlib:
不使用microlib:
添加如下代码,即可直接使用。
/* suport printf function, usemicrolib is unnecessary */
#if (__ARMCC_VERSION > 6000000)
__asm (".global __use_no_semihosting\n\t");
void _sys_exit(int x)
{
x = x;
}
/* __use_no_semihosting was requested, but _ttywrch was */
void _ttywrch(int ch)
{
ch = ch;
}
FILE __stdout;
#else
#ifdef __CC_ARM
#pragma import(__use_no_semihosting)
struct __FILE
{
int handle;
};
FILE __stdout;
void _sys_exit(int x)
{
x = x;
}
#endif
#endif
#if defined ( __GNUC__ ) && !defined (__clang__)
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
/**
* @brief retargets the c library printf function to the usart.
* @param none
* @retval none
*/
PUTCHAR_PROTOTYPE
{
while(usart_flag_get(USART1, USART_TDBE_FLAG) == RESET);
usart_data_transmit(USART1, ch);
return ch;
}测试
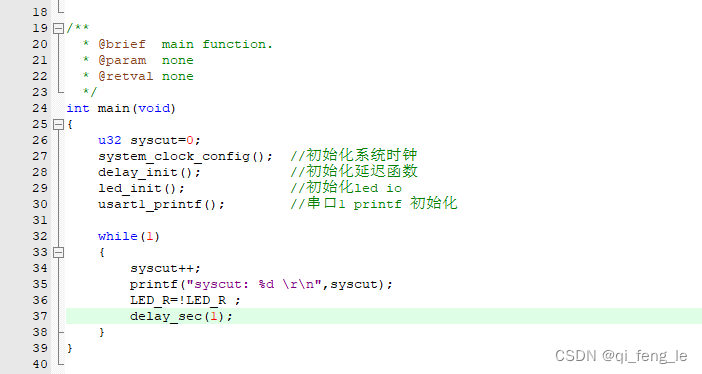
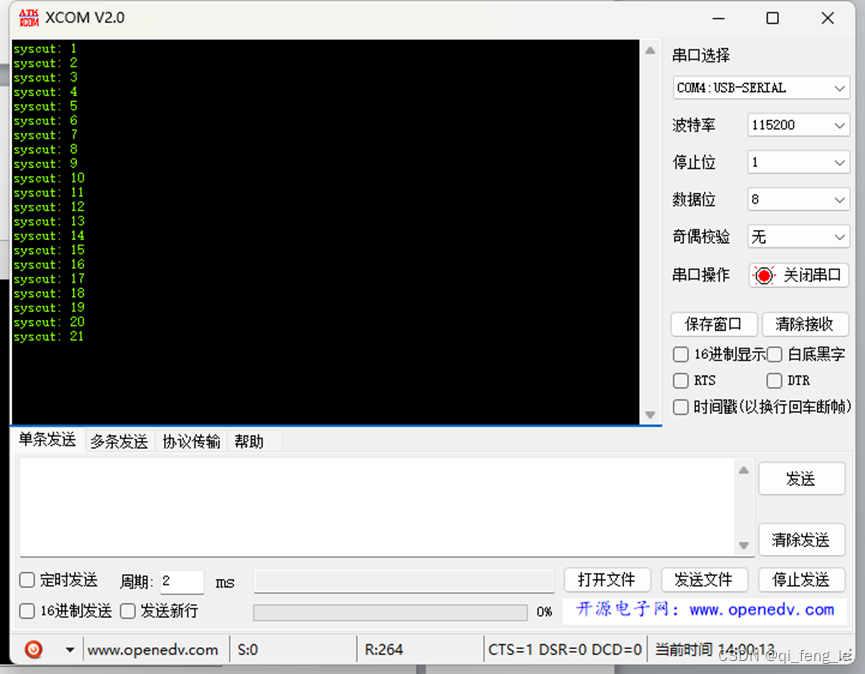
使用上面的其中一种方式后,在main中添加初始化,每隔1s自加1并且通过printf输出,通过串口软件看到正常输出。
映射其他串口
需要修改其他串口来输出的时候,初始化硬件对应串口和IO后,修改下面这个函数里面的串口号即可,比如改成串口2。
PUTCHAR_PROTOTYPE
{
while(usart_flag_get(USART2, USART_TDBE_FLAG) == RESET);
usart_data_transmit(USART2, ch);
return ch;
}
最后
有问题的可以加QQ群技术交流,同时相关代码上传到qq群中。

















 1512
1512

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









