






1. 最小二乘问题的几种证法
1.1
考虑最小二乘问题: ,AX表示在A线性空间中的一组线性组合而成的一个向量,使其到b向量距离最短,由于最小二乘是超定方程,所以b向量维度比AX维度高的,什么时候取到最短,当且仅当
时,如图所示:
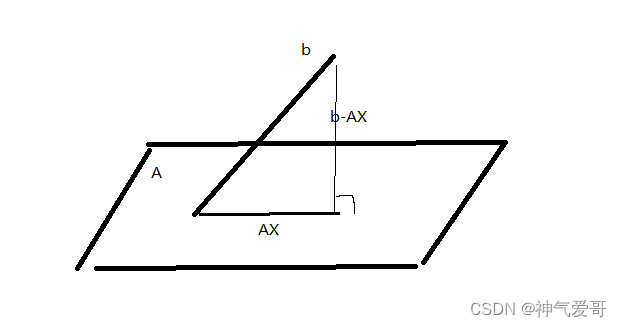
b-AX垂直于A的向量空间,则有:
得证:
1.2
取到极值时,倒数为0
再根据矩阵求导法则 :
,得证
2. 为什么海森矩阵半正定不能确定最小值
因为,由于在极值处
值为0,因此,
是否时极值取决于
的符号,当
也为0时,就要取决于更高次的导数了,因此半正定无法确定最小值。反之,如果
为正定矩阵,则
肯定在x处取得最小值
3. 样本方差为什么是
证明:
又因为
所以,根据泰勒公式及协方差传播定律有:
带入上式得:
4. 李代数伴随矩阵证明
To expand on the existing answer: for me the tricky part was actually going from eq. 23 to eq. 24. There's probably an easier way to see it, but here's how I did it.
Recall that for a vector uu, the matrix u×u× is defined as the linear transformation
u×::v↦u×v.u×::v↦u×v.
So the identity R⋅ω×⋅R−1=(Rω)×R⋅ω×⋅R−1=(Rω)× can be intuitively interpreted as "[unrotating, then crossing with ωω, then rotating] is the same as [crossing with a rotated ωω]". We can prove this identity by letting the RHS of the identity act upon an arbitrary vector vv:
(Rω)×v=(Rω)×v=(Rω)×(RR−1v)=R[ω×(R−1v)]=Rω×R−1v,(Rω)×v=(Rω)×v=(Rω)×(RR−1v)=R[ω×(R−1v)]=Rω×R−1v,
where we have used the fact that for any rotation matrix UU and vectors a,ba,b we have
(Ua)×(Ub)=U(a×b)
















 716
716











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











