






这篇blog是翻译自iOS Tutorial Team的成员 Johann Fradj,他目前是一位全职的资深iOS开发工程师。他是HotApps Factory的创始人,该公司开发了AppCooker
你是否在做一款游戏的时候想实现一种寻路算法,让一些怪兽或者游戏主角,让它们移动到特定的位置,避开墙壁和障碍物呢?
如果是的话,请看这篇教程,我们会展示如何使用著名的A星寻路算法来实现它!
公式表示为: f(n)=g(n)+h(n),
其中 f(n)是从初始点经由节点n到目标点的估价函数,
g(n) 是在状态空间中从初始节点到n节点的实际代价,
h(n) 是从 n 到目标节点最佳路径的估计代价在网上已经有很多篇关于A星寻路算法的文章,但是大部分都是提供给已经了解基本原理的高级开发者的,相信你绞尽脑汁看了之后只记得个公式 f=g+h其他的全是浮云,这个公式相信你也一定怎么看都是天书一样。而你又不敢向那些高手大牛们抱怨什么,因为在他们看来,你只是个菜鸟,你看不懂只是你智商问题,跟他们没有任何关系。 如果你学历尚可那大学课程也一定有教授讲授过,但你扪心自问,教授讲的你听懂了吗?而老师关心过学生听没听懂这个问题了吗?
再精妙的计算机原理,如果看不懂的话, 那就什么用也没有。这不知道是多么尴尬的事情。但谁也没规定这个寻路算法只是大牛或专家们的专利。
F=G+H倒底是什么意思?不用着急,本篇教程面向菜鸟,将从最基本的原理讲起。我们会一步步讲解A星寻路算法,幷配有很多图解和例子,力争让你搞懂,并能应用在实际上,而决不只停留在书本成为好看的花瓶。 一只找不到回家路的小猫
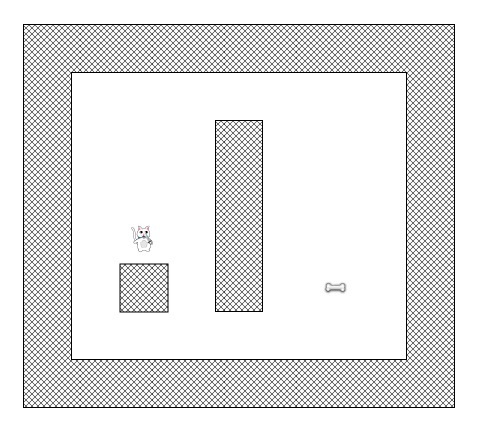
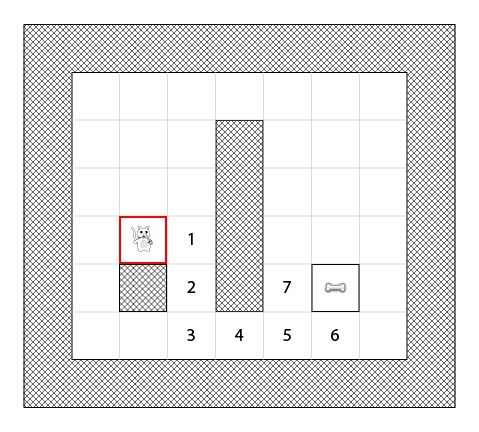
让我们想象一下,有一款游戏,游戏中一只猫想要找到获取骨头的路线。
“为什么会有一只猫想要骨头?!”你可能会这么想。在本游戏中, 这是一只聪明的猫,他想捡起骨头并不是自己想吃,而是贿赂给挡在路上的狗,以防止被恶狗咬死!
现在想像一下下图中的猫想找到到达骨头的最短路径:
看的出,猫不能直接从它当前的位置走到骨头的位置,因为有面墙挡住了去路,而且它在游戏中不是一只幽灵猫!
游戏中的猫同样懒惰,它总是想找到最短路径,这样当他回家时不会太累:-)
但是我们如何编写一个算法计算出猫要选择的那条路径呢?A星算法拯救了我们!
简化搜索区域
寻路的第一步是简化成容易控制的搜索区域
怎么处理要根据游戏来决定了。例如,我们可以将搜索区域划分成像素点,但是这样的划分粒度对于我们这款基于方块的游戏来说太高了(没必要)。
作为代替,我们使用方块(一个正方形)作为寻路算法的单元。其他的形状类型也是可能的(比如三角形或者六边形),但是正方形是最简单并且最适合我们需求的。
像那样去划分,我们的搜索区域可以简单的用一个地图大小的二维数组去表示。所以如果是25*25方块大小的地图,我们的搜索区域将会是一个有625个正方形的数组。如果我们把地图划分成像素点,搜索区域就是一个有640,000个正方形的数组了(一个方块是32*32像素)!
现在让我们基于目前的区域,把区域划分成多个方块来代表搜索空间(在这个简单的例子中,7*6个方块 = 42 个方块):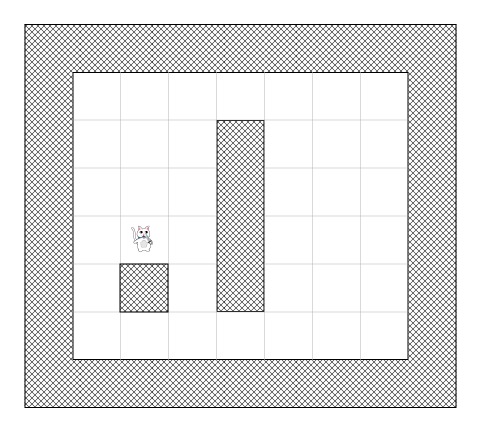
Open表和Close表
除了懒惰之外,我们的猫没有好的记忆力,所以它需要两个列表:
1.一个记录下所有被考虑来寻找最短路径的方块(称为open 列表)
2.一个记录下不会再被考虑的方块(成为closed列表)
猫首先在closed列表中添加当前位置(我们把这个开始点称为点 “A”)。然后,把所有与它当前位置相邻的可通行小方块添加到open列表中。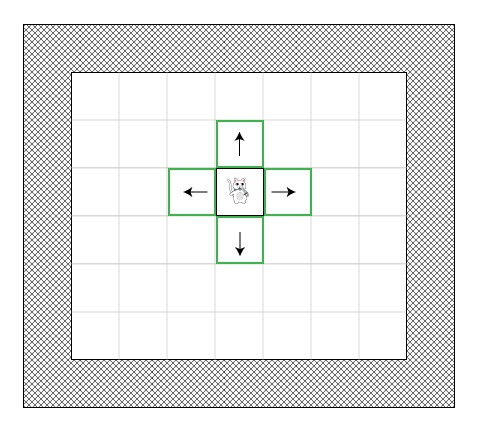
上图是猫在某一位置时的情景(绿色代表open列表):
现在猫需要判断在这些选项中,哪项才是最短路径,但是它要如何去选择呢?
在A星寻路算法中,通过给每一个方块一个和值,该值被称为路径增量。让我们看下它的工作原理!
路径增量
我们将会给每个方块一个G+H和值:
•G是从开始点A到当前方块的移动量。所以从开始点A到相邻小方块的移动量为1,该值会随着离开始点越来越远而增大。
•H是从当前方块到目标点(我们把它称为点B,代表骨头!)的移动量估算值。这个常被称为探视,因为我们不确定移动量是多少 – 仅仅是一个估算值。
你也许会对“移动量”感兴趣。在游戏中,这个概念很简单 – 仅仅是方块的数量。
然而,在游戏中你可以对这个值做调整。例如:
•如果你允许对角线移动,你可以针对对角线移动把移动量调得大一点。
•如果你有不同的地形,你可以将相应的移动量调整得大一点 – 例如针对一块沼泽,水,或者猫女海报:-)
这就是大概的意思 – 现在让我们详细分析下如何计算出G和H值。
关于G值:
G是从开始点A到达当前方块的移动量(在本游戏中是指方块的数目)。为了计算出G的值,我们需要从它的前继(上一个方块)获取,然后加1。所以,每个方块的G值代表了从点A到该方块所形成路径的总移动量。
例如,下图展示了两条到达不同骨头的路径,每个方块都标有它的G值:
关于H值
H值是从当前方块到终点的移动量估算值(在本游戏中是指方块的数目)。
移动量估算值离真实值越接近,最终的路径会更加精确。如果估算值停止作用,很可能生成出来的路径不会是最短的(但是它可能是接近的)。这个题目相对复杂,所以我们不会再本教程中讲解,但是我在教程的末尾提供了一个网络链接,对它做了很好的解释。
为了让它更简单,我们将使用“曼哈顿距离方法”(也叫“曼哈顿长”或者“城市街区距离”),它只是计算出距离点B,剩下的水平和垂直的方块数量,略去了障碍物或者不同陆地类型的数量。
例如,下图展示了使用“城市街区距离”,从不同的开始点到终点,去估算H的值(黑色字):
A星算法
既然你知道如何计算每个方块的和值(我们将它称为F,等于G+H), 我们来看下A星算法的原理
猫会重复以下步骤来找到最短路径:
1.将方块添加到open列表中,该列表有最小的和值。且将这个方块称为S吧。
2.将S从open列表移除,然后添加S到closed列表中。
3.对于与S相邻的每一块可通行的方块T:
1.如果T在closed列表中:不管它。
2.如果T不在open列表中:添加它然后计算出它的和值。
3.如果T已经在open列表中:当我们使用当前生成的路径到达那里时,检查F 和值是否更小。如果是,更新它的和值和它的前继。
如果你对它的工作原理还有点疑惑,不用担心 – 我们会用例子一步步介绍它的原理!:]
猫的路径
让我们看下我们的懒猫到达骨头的行程例子。
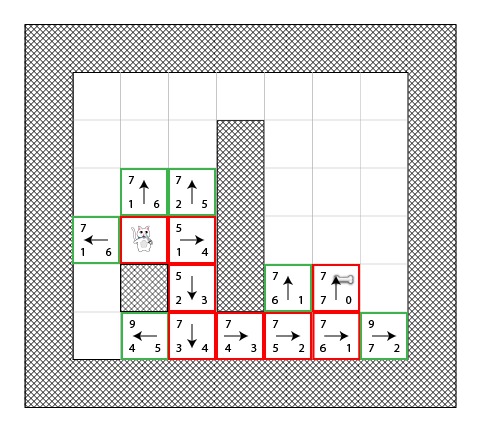
在下图中,我根据以下内容,列出了公式F = G + H 中的每项值:
•F(方块的和值):左上角
•G(从A点到方块的移动量):左下角
•H(从方块到B点的估算移动量): 右下角
同时,箭头指示了到达相应方块的移动方向。
最后,在每一步中,红色方块表示closed列表,绿色方块表示open列表。
好的,我们开始吧!
第一步,猫会确定相对于开始位置(点A)的相邻方块,计算出他们的F和值,然后把他们添加到open列表中: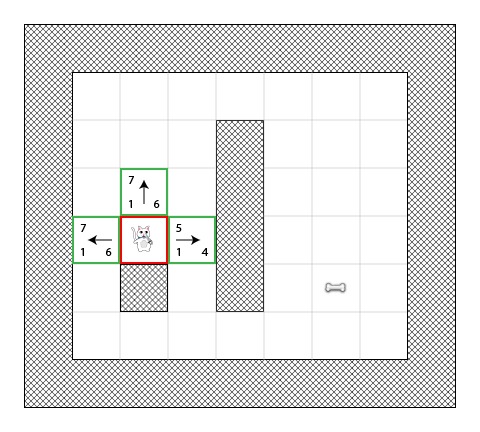
你会看到每个方块都列出了H值(有两个是6,一个是4)。我建议根据“城市街区距离”去计算方块的相关值,确保你理解了它的原理。
同时注意F值(在左上角)是G(左下角)值和H(右下脚)值的和
第二步
在第二步中,猫选择了F和值最小的方块,把它添加到closed列表中,然后检索它的相邻方块的相关数值。
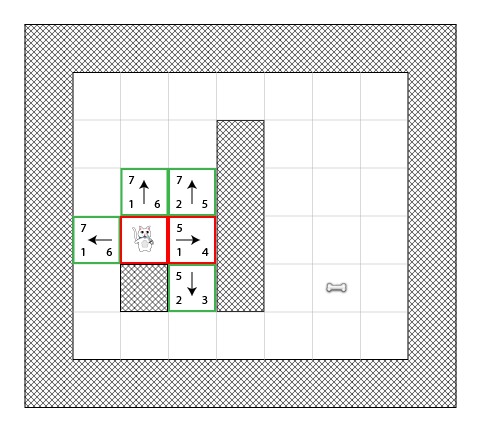
现在你将看到拥有最小增量的是F值为4的方块。猫尝试添加所有相邻的方块到open列表中(然后计算他们的和值),除了猫自身的方块不能添加以外(因为它已经被添加到了closed列表中)或者它是墙壁方块(因为它不能通行)。
注意被添加到open列表的两个新方块,他们的G值都增加了1,因为他们现在离开始点有2个方块远了。你也许需要再计算下“城市街区距离”以确保你理解了每个新方块的H值。第三步
再次,我们选择了有最小F和值(5)的方块,继续重复之前的步骤:
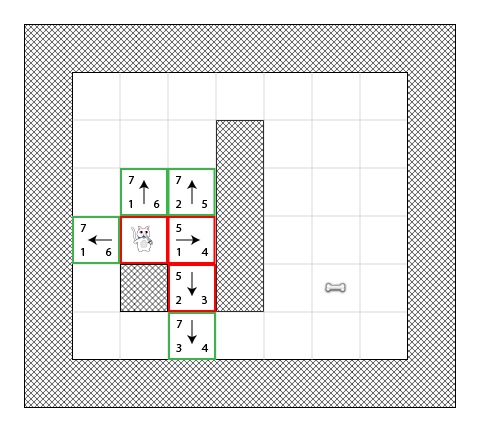
现在,只有一个可能的方块被添加到open列表中了,因为已经有一个相邻的方块在close列表中,其他两个是墙壁方块。
第四步
现在我们遇到了一个有趣的情况。正如你之前看到的,有4个方块的F和值都为7 –我们要怎么做呢?!
有几种解决方法可以使用,但是最简单(快速)的方法是一直跟着最近被添加到open列表中的方块。现在继续沿着最近被添加的方块前进。
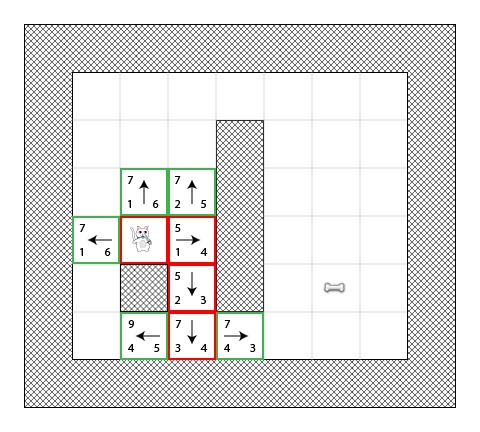
这次有两个可通过的相邻方块了,我们还是像之前那样计算他们的和值。
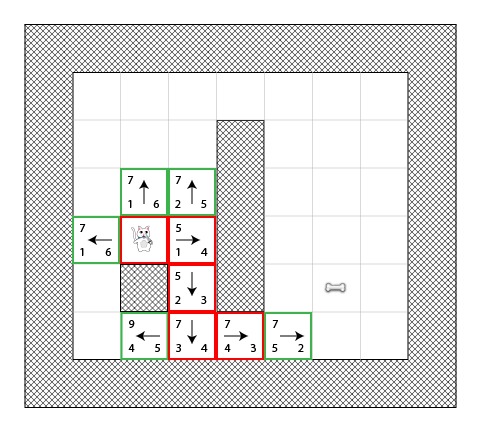
第五步
接着我们选择了最小和值(7)的方块,继续重复之前的步骤:
现在,我们已经越来越接近终点了!
第六步
你现在训练有素了!我打赌你能够猜出下一步是下面这样子了:
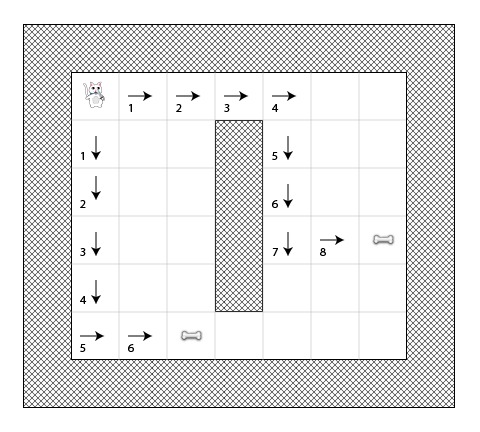
我们差不多到终点了,但是这次你看到有两条到达骨头的最短路径提供给我们选择:
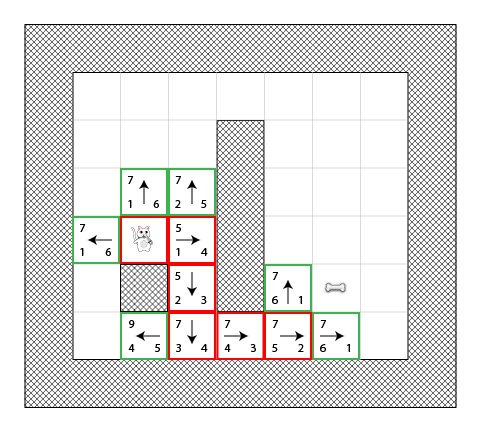
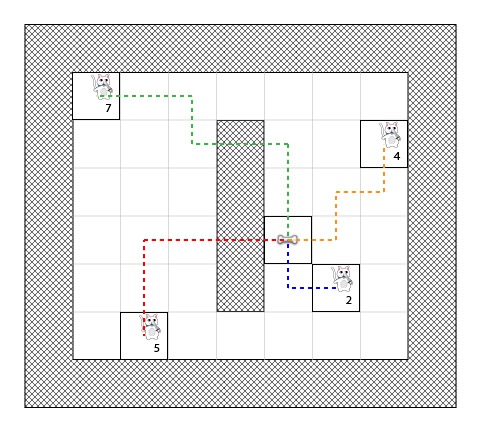
在我们的例子中,有两条最短路径:
•1-2-3-4-5-6
•1-2-3-4-5-7选择哪一条其实没关系,现在到了真正用代码实现的时候了
第七步
让我们从其中一块方块,再重复一遍步骤吧:
哈哈,骨头已经收入囊中了!
第八步
现在目标方块在open列表中了,算法会把它添加到closed列表中:
然后,算法要做的事情就是返回,计算出最终的路径!
部分寻路的关键代码:
void CatSprite::moveToward(const cocos2d::CCPoint &target)
{
this->stopActionByTag(1);
CCPoint fromTileCoord = _layer->tileCoordForPosition(this->getPosition()); //出发点是当前猫所在点
CCPoint toTileCoord = _layer->tileCoordForPosition(target); //到达的目的点
float epsion = 0.0000001f;
//比较下当前点与目标点,看看是不是已经走到了地方
if(abs(fromTileCoord.x-toTileCoord.x)<epsion && abs(fromTileCoord.y - toTileCoord.y)<epsion) //if(fromTileCoord == toTileCoord)
{
CCLog("You're already there");
return;
}
//撞墙了或不可走,播放撞墙声音
if (!_layer->isValidTileCoord(toTileCoord) || _layer->isWallAtTileCoord(toTileCoord))
{
SimpleAudioEngine::sharedEngine()->playEffect("hitWall.wav");
return;
}
CCLOG("From: %f, %f", fromTileCoord.x, fromTileCoord.y);
CCLOG("To: %f, %f", toTileCoord.x, toTileCoord.y);
//先清空open表和close表
bool pathFound = false;
_spOpenSteps.clear();
_spClosedSteps.clear();
//首先添加猫的所在方块到open表里
this->insertInOpenSteps(ShortestPathStep::createWithPosition(fromTileCoord));
do
{
// 得到最小的F值步骤
// 因为是有序列表,第一个步骤总是最小的F值
ShortestPathStep *currentStep = _spOpenSteps[0];
currentStep->retain();
//添加当前步骤到close表里
_spClosedSteps.push_back(currentStep);
//将它从Open表里删除
_spOpenSteps.erase(_spOpenSteps.begin());
//如果当前步骤是目标方块,就完成了
if (ToolUtils::isEqualTwoPoint(currentStep->getPosition(), toTileCoord))
{
this->constructPathAndStartAnimationFromStep(currentStep); //确立动画路径
_spOpenSteps.clear();
_spClosedSteps.clear();
break;
}
//还没到目标,就取出猫周围的邻接块集,一一计算G值并添加到open表
vector<CCPoint> vecPos = _layer->walkableAdjacentTilesCoordForTileCoord(currentStep->getPosition());
for (size_t i=0; i<vecPos.size(); ++i)
{
ShortestPathStep *step = ShortestPathStep::createWithPosition(vecPos[i]);
//检查步骤是不是已经在closed列表里
if(this->getStepIndex(_spClosedSteps, step)!=-1)
continue;
//计算从当前步骤到此步骤的代价,一般是1
int moveCost = this->costToMoveFromStepToAdjacentStep(currentStep, step);
//检查这个邻接点是否已经在open表里了
size_t index = this->getStepIndex(_spOpenSteps, step);
//不在open表里,添加它
if (index == -1)
{
// 设置此邻接点步骤的父节点为当前步骤,作为计算好路径时回溯之用
step->setParent(currentStep);
// G值等同于上一步的G值 + 从上一步到达这儿的成本
step->setGScore(currentStep->getGScore() + moveCost);
//H值等于从此步到目标的估算值
step->setHScore(this->computeHScoreFromCoordToCoord(step->getPosition(), toTileCoord));
//按升序添加到open列表
this->insertInOpenSteps(step);
}
else //已经在open表里,就需要根据当前步重新计算G值大小,并按升序存入open表
{
//获取计算好的step
step = _spOpenSteps.at(index);
//检查G值是否低于当前步骤到此步骤的值
if ((currentStep->getGScore() + moveCost) < step->getGScore())
{
step->setGScore(currentStep->getGScore() + moveCost);
//step因为要先从open表里同删除再按序插入,所以要先扣留它的引用
step->retain();
// 因为G值改变了,F值也会跟着改变
// 所以为了保持open列表有序,需要将此步骤移除,再重新按序插入
vector<ShortestPathStep*>::iterator it = _spOpenSteps.begin() + index;
_spOpenSteps.erase(it);
//重新按序插入
this->insertInOpenSteps(step);
step->release();
}
}
}
} while (_spOpenSteps.size()>0);
if (_shortestPath.empty())
{
SimpleAudioEngine::sharedEngine()->playEffect("hitWall.wav");
}
}
void CatSprite::insertInOpenSteps(ShortestPathStep *step)
{
int stepFScore = step->getFScore();
size_t count = _spOpenSteps.size();
//搜寻第一个比它大的,插入后面
std::vector<ShortestPathStep*>::iterator it = _spOpenSteps.begin();
while(it != _spOpenSteps.end())
{
if(stepFScore <= (*it)->getFScore())
break;
it++;
}
_spOpenSteps.insert(it, step);
}详细的源代码和示例游戏程序在这里 源代码















 7468
7468

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









