








目录
一、安装torchserve
直接参考官方:
 https://github.com/pytorch/serve
https://github.com/pytorch/serve二、生成mar文件
1、编写handler代码
# -*- coding: utf-8 -*-
import pickle
import numpy as np
from ts.torch_handler.base_handler import BaseHandler
import torch
import torchvision
import time
import torch.nn.functional as F
def xywh2xyxy(x):
# Convert nx4 boxes from [x, y, w, h] to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-right
y = x.clone() if isinstance(x, torch.Tensor) else np.copy(x)
y[:, 0] = x[:, 0] - x[:, 2] / 2 # top left x
y[:, 1] = x[:, 1] - x[:, 3] / 2 # top left y
y[:, 2] = x[:, 0] + x[:, 2] / 2 # bottom right x
y[:, 3] = x[:, 1] + x[:, 3] / 2 # bottom right y
return y
class ModelHandler(BaseHandler):
def __init__(self):
super().__init__()
self._context = None
self.initialized = False
self.explain = False
self.target = 0
def preprocess(self, data):
# (b, 3, 640, 640)
print(type(data))
data = pickle.loads(data[0].get("data"))
preprocessed_data = data['img']
print(preprocessed_data.shape)
params = data['params']
print(params)
self.params = params
self.conf_thres = params['conf_thres']
self.iou_thres = params['iou_thres']
preprocessed_data = torch.from_numpy(preprocessed_data).cuda()
preprocessed_data = preprocessed_data / 255.
# (3, 640, 640)
#preprocessed_data = preprocessed_data.permute(2, 0, 1)
# (1, 3, 640, 640)
#preprocessed_data = preprocessed_data.unsqueeze(0)
preprocessed_data = preprocessed_data.type(torch.cuda.FloatTensor)
return preprocessed_data
def inference(self, model_input, *args, **kwargs):
# Do some inference call to engine here and return output
with torch.no_grad():
pred = self.model.forward(model_input)[0]
print('pred shape ', pred.shape)
return pred
def postprocess(self, inference_output):
postprocess_output = inference_output
#postprocess_output = [i for i in inference_output]
pred = self.non_max_suppression(postprocess_output, conf_thres=self.conf_thres, iou_thres=self.iou_thres)
pred = [p.tolist() for p in pred]
print('post pred shape ', np.array(pred).shape)
return [pred]
def non_max_suppression(self, prediction,
conf_thres=0.25,
iou_thres=0.45,
classes=None,
agnostic=False,
multi_label=False,
labels=(),
max_det=300):
"""Non-Maximum Suppression (NMS) on inference results to reject overlapping bounding boxes
Returns:
list of detections, on (n,6) tensor per image [xyxy, conf, cls]
"""
bs = prediction.shape[0] # batch size
nc = prediction.shape[2] - 5 # number of classes
xc = prediction[..., 4] > conf_thres # candidates
# Checks
assert 0 <= conf_thres <= 1, f'Invalid Confidence threshold {conf_thres}, valid values are between 0.0 and 1.0'
assert 0 <= iou_thres <= 1, f'Invalid IoU {iou_thres}, valid values are between 0.0 and 1.0'
# Settings
# min_wh = 2 # (pixels) minimum box width and height
max_wh = 7680 # (pixels) maximum box width and height
max_nms = 30000 # maximum number of boxes into torchvision.ops.nms()
time_limit = 0.1 + 0.03 * bs # seconds to quit after
redundant = True # require redundant detections
multi_label &= nc > 1 # multiple labels per box (adds 0.5ms/img)
merge = False # use merge-NMS
t = time.time()
output = [torch.zeros((0, 6), device=prediction.device)] * bs
for xi, x in enumerate(prediction): # image index, image inference
# Apply constraints
# x[((x[..., 2:4] < min_wh) | (x[..., 2:4] > max_wh)).any(1), 4] = 0 # width-height
x = x[xc[xi]] # confidence
# Cat apriori labels if autolabelling
if labels and len(labels[xi]):
lb = labels[xi]
v = torch.zeros((len(lb), nc + 5), device=x.device)
v[:, :4] = lb[:, 1:5] # box
v[:, 4] = 1.0 # conf
v[range(len(lb)), lb[:, 0].long() + 5] = 1.0 # cls
x = torch.cat((x, v), 0)
# If none remain process next image
if not x.shape[0]:
continue
# Compute conf
x[:, 5:] *= x[:, 4:5] # conf = obj_conf * cls_conf
# Box (center x, center y, width, height) to (x1, y1, x2, y2)
box = xywh2xyxy(x[:, :4])
# Detections matrix nx6 (xyxy, conf, cls)
if multi_label:
i, j = (x[:, 5:] > conf_thres).nonzero(as_tuple=False).T
x = torch.cat((box[i], x[i, j + 5, None], j[:, None].float()), 1)
else: # best class only
conf, j = x[:, 5:].max(1, keepdim=True)
x = torch.cat((box, conf, j.float()), 1)[conf.view(-1) > conf_thres]
# Filter by class
if classes is not None:
x = x[(x[:, 5:6] == torch.tensor(classes, device=x.device)).any(1)]
# Apply finite constraint
# if not torch.isfinite(x).all():
# x = x[torch.isfinite(x).all(1)]
# Check shape
n = x.shape[0] # number of boxes
if not n: # no boxes
continue
elif n > max_nms: # excess boxes
x = x[x[:, 4].argsort(descending=True)[:max_nms]] # sort by confidence
# Batched NMS
c = x[:, 5:6] * (0 if agnostic else max_wh) # classes
boxes, scores = x[:, :4] + c, x[:, 4] # boxes (offset by class), scores
i = torchvision.ops.nms(boxes, scores, iou_thres) # NMS
if i.shape[0] > max_det: # limit detections
i = i[:max_det]
if merge and (1 < n < 3E3): # Merge NMS (boxes merged using weighted mean)
# update boxes as boxes(i,4) = weights(i,n) * boxes(n,4)
iou = box_iou(boxes[i], boxes) > iou_thres # iou matrix
weights = iou * scores[None] # box weights
x[i, :4] = torch.mm(weights, x[:, :4]).float() / weights.sum(1, keepdim=True) # merged boxes
if redundant:
i = i[iou.sum(1) > 1] # require redundancy
output[xi] = x[i]
if (time.time() - t) > time_limit:
LOGGER.warning(f'WARNING: NMS time limit {time_limit:.3f}s exceeded')
break # time limit exceeded
return output
def handle(self, data, context):
model_input = self.preprocess(data)
model_output = self.inference(model_input)
res = self.postprocess(model_output)
return res
if __name__ == '__main__':
handler = ModelHandler()
handler.initialize()
x = torch.randn(640,640,3)
x = handler.preprocess(x)
x = handle.inference(x)
x = handler.postprocess(x)
print(x)
主要就是写前处理、推理过程、后处理。
这里的前处理部分,输入数据是4维的,需要在访问模型服务是将img转成对应格式,也可以在前处理部分进行维度转换相关操作,两种方式都可以。
后处理部分,主要就是非极大值抑制,直接用的yolov5中的代码。
编写完成后,可以转成mar文件然后测试,一开始可能会有不少问题,我这里加了一些打印调试用的,如果能直接调试handler文件就好了,暂时没找到方法。
2、生成mar文件
a、先将yolov5的模型转成torchscript
这个比较简单,参考官方文档就行,有一个地方注意一下,转gpu的话,需要设置--device参数,默认是转cpu版本。
也可以不转torchscript模型,这种方式暂时没有尝试。
b、转mar文件
torch-model-archiver --model-name yolov5 --version 1.0 --serialized-file ../detection/yolov5/yolov5s.torchscript --export-path ../detection/yolov5/ --handler torch_serve/ts/torch_handler/yolov5_handler.py -f三、测试
1、测试代码
通过grpc方式:
# -*- coding: utf-8 -*-
import json
import pickle
import cv2
import numpy as np
import time
from PIL import Image, ImageDraw, ImageFont
from torchserve_grpc_client import *
stub = get_inference_stub()
def letterbox(im, new_shape=(640, 640), color=(114, 114, 114), auto=False, scaleFill=False, scaleup=True, stride=32):
# Resize and pad image while meeting stride-multiple constraints
shape = im.shape[:2] # current shape [height, width]
if isinstance(new_shape, int):
new_shape = (new_shape, new_shape)
# Scale ratio (new / old)
r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])
if not scaleup: # only scale down, do not scale up (for better val mAP)
r = min(r, 1.0)
# Compute padding
ratio = r, r # width, height ratios
new_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))
dw, dh = new_shape[1] - new_unpad[0], new_shape[0] - new_unpad[1] # wh padding
if auto: # minimum rectangle
dw, dh = np.mod(dw, stride), np.mod(dh, stride) # wh padding
elif scaleFill: # stretch
dw, dh = 0.0, 0.0
new_unpad = (new_shape[1], new_shape[0])
ratio = new_shape[1] / shape[1], new_shape[0] / shape[0] # width, height ratios
dw /= 2 # divide padding into 2 sides
dh /= 2
if shape[::-1] != new_unpad: # resize
im = cv2.resize(im, new_unpad, interpolation=cv2.INTER_LINEAR)
top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))
left, right = int(round(dw - 0.1)), int(round(dw + 0.1))
im = cv2.copyMakeBorder(im, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add border
return im, ratio, (dw, dh)
def get_data(img_file):
img0 = cv2.imread(img_file)
img = letterbox(img0, new_shape=(640, 640))[0]
img = img.transpose((2, 0, 1))[::-1] # to chw rgb
img = img[np.newaxis, ...]
print(img.shape)
return img0, img
def scale_coords(img1_shape, coords, img0_shape, ratio_pad=None):
# Rescale coords (xyxy) from img1_shape to img0_shape
if ratio_pad is None: # calculate from img0_shape
gain = min(img1_shape[0] / img0_shape[0], img1_shape[1] / img0_shape[1]) # gain = old / new
pad = (img1_shape[1] - img0_shape[1] * gain) / 2, (img1_shape[0] - img0_shape[0] * gain) / 2 # wh padding
else:
gain = ratio_pad[0][0]
pad = ratio_pad[1]
coords[:, [0, 2]] -= pad[0] # x padding
coords[:, [1, 3]] -= pad[1] # y padding
coords[:, :4] /= gain
clip_coords(coords, img0_shape)
return coords
def clip_coords(boxes, shape):
# Clip bounding xyxy bounding boxes to image shape (height, width)
#if isinstance(boxes, torch.Tensor): # faster individually
# boxes[:, 0].clamp_(0, shape[1]) # x1
# boxes[:, 1].clamp_(0, shape[0]) # y1
# boxes[:, 2].clamp_(0, shape[1]) # x2
# boxes[:, 3].clamp_(0, shape[0]) # y2
#else: # np.array (faster grouped)
boxes[:, [0, 2]] = boxes[:, [0, 2]].clip(0, shape[1]) # x1, x2
boxes[:, [1, 3]] = boxes[:, [1, 3]].clip(0, shape[0]) # y1, y2
def post_process(pred, img0, img):
print(pred.shape)
det = pred[0] # one image
if det is not None and len(det):
# Rescale boxes from imgsz to im0 size
det[:, :4] = scale_coords(img.shape[2:], det[:, :4], img0.shape).round()
return det
def draw_img(x, img, color=None, label=None, line_thickness=None):
# Plots one bounding box on image img
tl = line_thickness or round(0.002 * (img.shape[0] + img.shape[1]) / 2) + 1 # line/font thickness
color = color or [random.randint(0, 255) for _ in range(3)]
c1, c2 = (int(x[0]), int(x[1])), (int(x[2]), int(x[3]))
cv2.rectangle(img, c1, c2, color, thickness=tl, lineType=cv2.LINE_AA)
if label:
tf = max(tl - 1, 1) # font thickness
t_size = cv2.getTextSize(label, 0, fontScale=tl / 3, thickness=tf)[0]
c2 = c1[0] + t_size[0], c1[1] - t_size[1] - 3
cv2.rectangle(img, c1, c2, color, -1, cv2.LINE_AA) # filled
cv2.putText(img, label, (c1[0], c1[1] - 2), 0, tl / 3, [225, 255, 255], thickness=tf, lineType=cv2.LINE_AA)
#font_size = 20
#img_pil = Image.fromarray(cv2.cvtColor(img, cv2.COLOR_BGR2RGB))
#font = ImageFont.truetype('./ukai.ttc', size=font_size)
#draw = ImageDraw.Draw(img_pil)
#draw.text((c1[0], max(c1[1], 0)), label, (255, 0, 0), font)
#img = cv2.cvtColor(np.asarray(img_pil), cv2.COLOR_RGB2BGR)
return img
img_file = '/home/mi/workspace/projects/detection/yolov5/data/images/zidane.jpg'
img0, img = get_data(img_file)
data = {'img': img, 'params': {'conf_thres': 0.25, 'iou_thres': 0.45}}
data = pickle.dumps(data)
pred = infer(stub, "yolov5", data)
res = json.loads(pred)
res = np.array(res)
print(res.shape)
res = post_process(res, img0, img)
print(res)
names = ['person', 'bicycle', 'car', 'motorcycle', 'airplane', 'bus', 'train', 'truck', 'boat', 'traffic light',
'fire hydrant', 'stop sign', 'parking meter', 'bench', 'bird', 'cat', 'dog', 'horse', 'sheep', 'cow',
'elephant', 'bear', 'zebra', 'giraffe', 'backpack', 'umbrella', 'handbag', 'tie', 'suitcase', 'frisbee',
'skis', 'snowboard', 'sports ball', 'kite', 'baseball bat', 'baseball glove', 'skateboard', 'surfboard',
'tennis racket', 'bottle', 'wine glass', 'cup', 'fork', 'knife', 'spoon', 'bowl', 'banana', 'apple',
'sandwich', 'orange', 'broccoli', 'carrot', 'hot dog', 'pizza', 'donut', 'cake', 'chair', 'couch',
'potted plant', 'bed', 'dining table', 'toilet', 'tv', 'laptop', 'mouse', 'remote', 'keyboard', 'cell phone',
'microwave', 'oven', 'toaster', 'sink', 'refrigerator', 'book', 'clock', 'vase', 'scissors', 'teddy bear',
'hair drier', 'toothbrush'] # class names
for x1, y1, x2, y2, conf, cls in reversed(res):
#label = '%s %.2f' % (names[int(cls)], conf)
label = names[int(cls)]
img0 = draw_img([x1, y1, x2, y2], img0, label='{} {:.2f}'.format(label, conf), color=(0,0,255))
cv2.imwrite('res_{}.jpg'.format(''), img0)
2、启动torchserve
torchserve --start --ncs --model-store ../detection/yolov5/ --models yolov5.mar --ts-config torch_serve/docker/config.properties3、测试结果
代码放在ts_scripts目录中,可以直接运行。
结果:
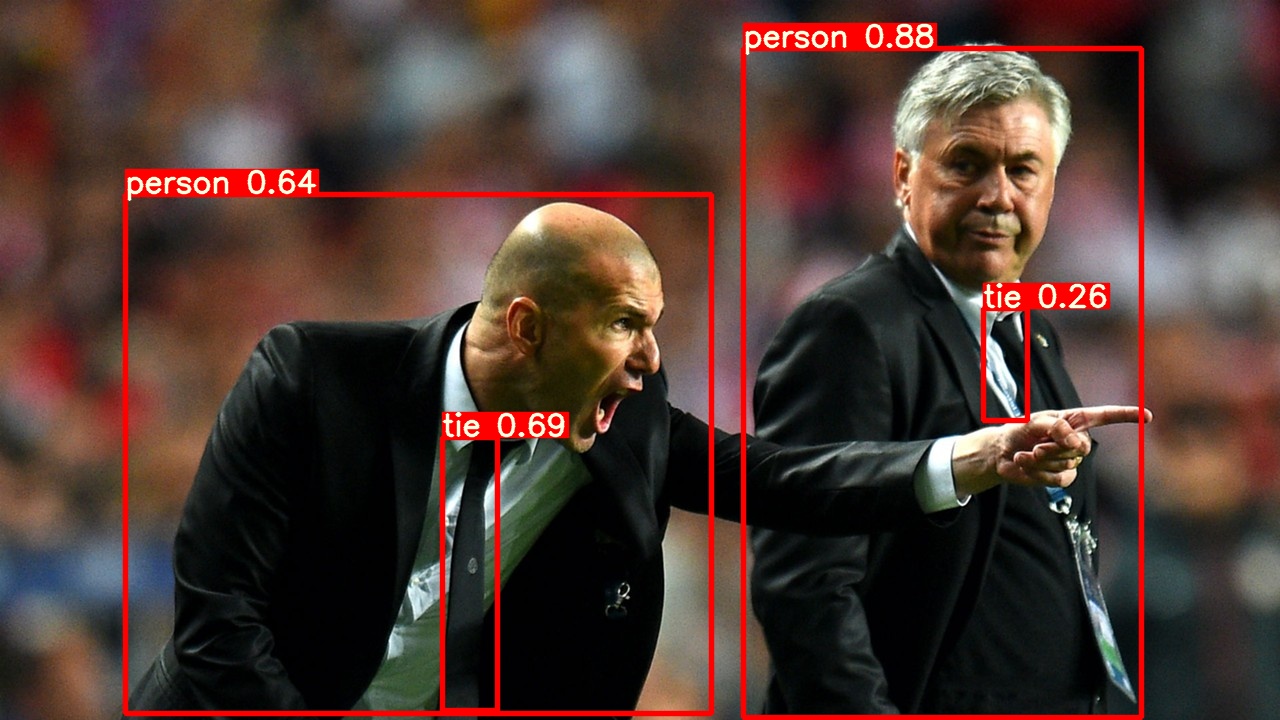
和pytorch模型结果做比较:
 可以发现两者结果一样,如果不放心,可以比较二者输出的检测结果,我看了一下,大概小数点后5、6位有差异,对我们来说没有任何影响。
可以发现两者结果一样,如果不放心,可以比较二者输出的检测结果,我看了一下,大概小数点后5、6位有差异,对我们来说没有任何影响。
这里需要注意一点,就是图片resize的方式,对比时要保持一致,具体参考yolov5中的letterbox方法。
四、其他问题
在测试过程中可能遇到的一些问题
1、请求/响应超过最大值
io.grpc.StatusRuntimeException: RESOURCE_EXHAUSTED: gRPC message exceeds maximum size 6553500: 10838210
修改config.properties中的max_request_size,max_response_size,在启动服务时通过--ts-config传入。
inference_address=http://0.0.0.0:8080
management_address=http://0.0.0.0:8081
metrics_address=http://0.0.0.0:8082
number_of_netty_threads=32
job_queue_size=1000
model_store=/home/model-server/model-store
workflow_store=/home/model-server/wf-store
max_request_size=65535000
max_response_size=65535000
grpc_inference_port = 7070
grpc_management_port = 70712、received message larger than max (56680420 vs. 4194304)
修改grpc接收消息最大值:
options = [('grpc.max_receive_message_length', 200 * 1024 * 1024)]
channel = grpc.insecure_channel('localhost:7070', options=options)
stub = inference_pb2_grpc.InferenceAPIsServiceStub(channel)














 3005
3005











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









