







一 油门故障保护
油门故障保护:遥控器油门PWM值低于预设保护值时,飞行器触发故障保护,避免坠机
触发条件:遥控器故障,遥控器与飞行器失联
设置:
地面站初始设置-故障保护
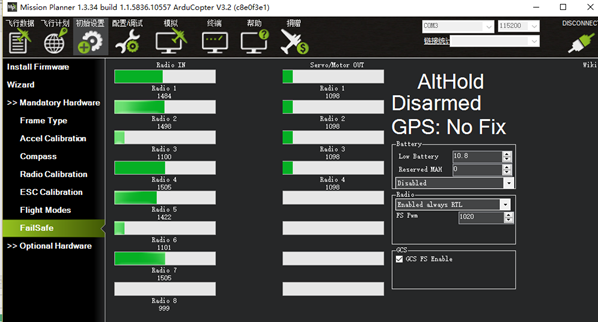
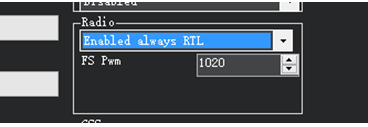
Radio选型中,PWM就是油门保护的阀值。当遥控器油门低于这个值便触发故障保护
设置要求
当遥控器关闭时,至少比油门通道3的PWM值高10
当遥控器打开时,至少比油门通道3的PWM值低10
必须大于910
触发类型选择触发返航(RTL)
设置遥控器端
A:进入遥控器失控保护
B:设置油门通道失控保护PWM值最低值(比地面站设置的最少低10)
二 电池故障保护
若使用电源供电模块的话,可以进行电池故障保护设置。
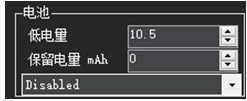
初始设置-故障保护
(3)设置要求
A:
低电量:设置你认为需要激发电池故障保护的电压。锂电池的标称电压是3.7V,低于3.7V时候降压特别快。如电芯在3.6V时候激发电池故障保护,3S的电池是3*3.6V=10.8V。如电芯在3.5V时候激发电池故障保护,3S的电池是3*3.5V=10.5V。低于这个设置的电压超过10秒就会激发电池故障保护。
B:
保留电量:设置剩余电池容量多少时候激发电池故障保护。一般是设置为总容量的20%。如电池容量是2600mAh,20%的容量是520mAH。低于这个设置的电池容量就会激发电池故障保护。如果输入0的话将忽略这个参数。
C:
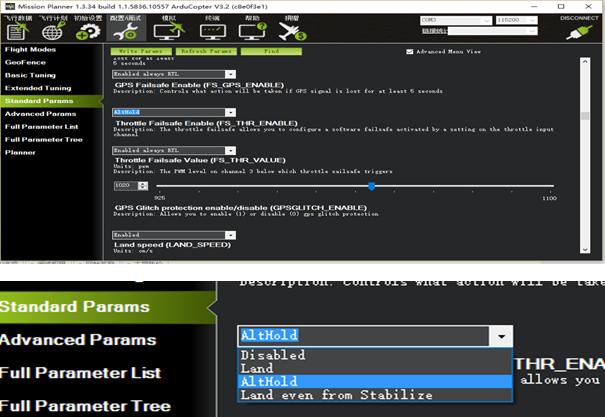
设置完毕后,把“Disabled” 改为“Land”(降落)或者“RTL”(返航)。
如果是在自稳(Stabilize)飞行模式或者特技(Acro)飞行模式下解锁,并油门还是为0的时候,APM会立即上锁;如果是在自动(AUTO)飞行模式下,并且GPS已经定好起飞前“家”的位置,飞离“家”2米以上距离时候就自动返航(RTL);其它情况下是执行降落(Land)。其实就是说,电池故障保护只有在自动飞行模式下会激发“RTL”(返航),其它都是立即降落。
注意:一定要设置好电源模块的电压和电量参数(电池监测器),否则会激发出错误的电池故障保护如果换不同电压或者容量电池后,务必要重新修改以上两个值。
三 地面站故障保护
如果使用地面站通过数传来控制飞行器,在地面站软件发生故障或者电脑死机时候,造成地面站与飞行器失去联系超过5秒后激发地面站故障保护。
地面站故障保护会发生:
(1)如果在自稳飞行模式或者特技飞行模式解锁,并且遥控器油门为0的时候,APM自动上锁。
(2)GPS已经定好起飞前“家”的位置,飞离“家”2米以上距离时候就自动返航。
(3)起飞前GPS没有定好位置,或在“家”两米之内自动降落。
(4)如果在自动飞行模式,并且参数Enabled_continue_in_auto_mode 设置2的时候继续执行任务。
打开主菜单“配置/调试”的“全部参数表”,在搜索框中输入“FS_GCS_ENABLE”查询。“FS_GCS_ENABLE”值中0表示禁止地面站故障保护,1表示立即返航,2表示自动飞行模式将会继续任务,其它飞行模式返航。注意的是,如果你的地面站只是调参或者监控用途,并没有直接控制飞行器飞行,那就没必要激活这个地面站故障保护。
如果激发地面站障保护后,飞行器与地面站又恢复连接,飞行器会保持激发故障后的飞行模式(返航或者降落),需要手工切换到其它飞行模式。例如开始时候是自稳的飞行模式,发生地面站故障保护后飞行模式更改为返航或降落,如果想要重新控制飞行器,需要再次切换飞行模式,才能切换回到自稳模式。
四:GPS故障保护
默认情况下,MP的GPS故障是开启的。如果飞行器在需要使用GPS的飞行模式下(自动、引导、留待、返航、绕圈、定点、飘移等)下飞行,发生超过5秒的GPS故障就会激发降落或者定高模式。
打开主菜单“配置/调试”的“全部参数表”,在搜索框中输入“FS_GPS_ENABLE”查询。“FS_GPS_ENABLE”值中0表示禁止,1表示切换到降落模式,2表示切换到定高飞行模式。
或者:

















 1049
1049

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









