







 超级会员免费看
超级会员免费看

嗨,各位同学大家好!笔者自985硕士毕业后,在机器人算法领域已经深耕 7 年多啦。这段时间里,我积累了不少宝贵经验。本专栏《机器人工程师带你从零入门SLAM》将结合 上面的SLAM 知识体系思维导图及多年的工作实战总结,将尽力把每一块知识都用最通俗易懂的方式讲给大家,并带上实际应用的程序案例。目的就是帮大家全方位搭建起机器人及自动驾驶方面的知识大厦,为后续的学习筑牢根基。这个专栏计划在 2025 年每周持续更新,欢迎大家订阅,一起开启学习之旅!今天带大家了解,机器人及自动驾驶必备基础:VSCode教程 及 AI代码插件推荐。
一、开篇:踏入机器人与自动驾驶编程世界
在机器人与自动驾驶领域,编程就像是一场高难度的冒险。从让机器人精准地抓取物品,到自动驾驶汽车在复杂路况中安全行驶,背后都离不开海量代码的支撑。面对繁多的算法、复杂的硬件交互,开发者们常常陷入困境:**如何高效编写代码?怎样快速调试程序?别担心,今天就给大家带来一款超强大的编程神器 ——VSCode,以及能让编程之路 “一马平川” 的实用插件推荐,**无论你是新手小白还是资深大神,都能从中受益!
二、基础搭建:安装与配置你的 VSCode
(一)下载安装有妙招
首先,打开你的浏览器,前往 VSCode 官方网站(https://code.visualstudio.com/)。在这里,你能看到醒目的 “Download” 按钮,点击它,就会弹出不同操作系统对应的下载选项。
如果你使用的是 Windows 系统,根据电脑系统位数(32 位或 64 位)选择相应版本,下载完成后,双击.exe 安装文件,按照安装向导的提示,一路点击 “Next”,轻松就能完成安装。安装过程中,建议将路径修改至非系统盘,避免占用 C 盘过多空间,影响电脑性能。
对于 Linux 用户,以 Ubuntu 系统为例,在官网下载.deb 安装包后,在终端中使用 “sudo dpkg -i [安装包文件名]” 命令进行安装,安装完成后,在应用程序菜单中就能找到 VSCode 图标。要是你偏爱命令行操作,还可以通过 Snap 或 Flatpak 方式安装,同样便捷。
Mac 用户也别担心,访问官网,点击 “Download for Mac”,下载.dmg 文件,双击打开后将 “Visual Studio Code.app” 拖移至 “Applications” 文件夹,安装就大功告成。初次启动时,系统可能会提示你是否信任该软件,放心点击 “打开” 即可。
(二)界面汉化与初始设置
新手刚打开 VSCode,面对全英文界面可能会有些迷茫。别慌,汉化很简单!点击左侧的 “Extensions” 图标(或按下快捷键 Ctrl+Shift+X),在搜索框中输入 “Chinese (Simplified)”,找到中文简体插件,点击 “Install” 进行安装,安装完成后重启 VSCode,界面就变成亲切的中文啦。
接下来,调整一些基本设置,让编程环境更舒适。点击左下角的齿轮图标,选择 “Settings”,在设置页面中,你可以更改字体、字号。比如,将字体设为 “Consolas”“Fira Code” 等编程常用字体,字号根据个人喜好调整为 16px 或 18px,让代码看起来更清晰。还能在 “Color Theme” 中挑选心仪的主题,深色主题如 “Monokai” 护眼又酷炫,浅色主题 “Light+” 简洁明亮,总有一款适合你。
三、核心实战:VSCode 在机器人及自动驾驶的深度应用

(一)语言编译器适配指南
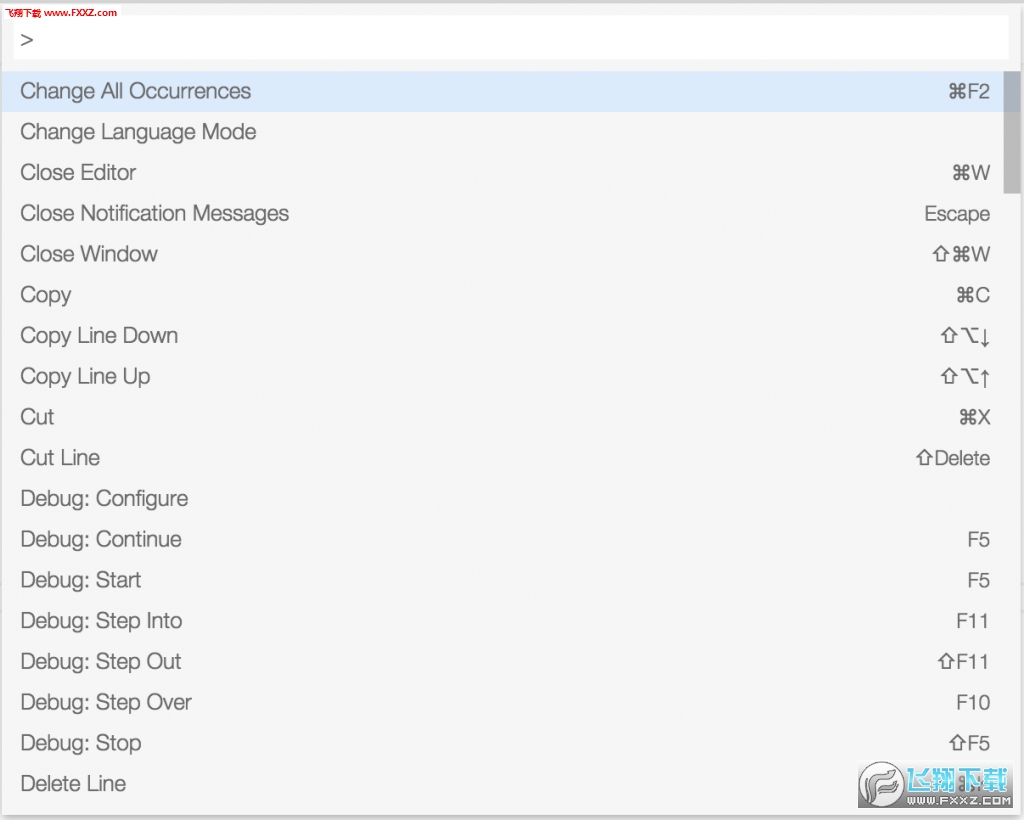
在机器人与自动驾驶项目中,C++ 和 Python 堪称 “主力军”。先以 C++ 为例,若是 Windows 用户,得先安装 MinGW-w64 编译器。前往官网(https://mingw-w64.org/doku.php)下载对应版本,解压至指定文件夹,比如 “C:mingw64”,接着将其 bin 路径 “C:mingw64bin” 添加到系统环境变量 Path 中。在 VSCode 里,按下 Ctrl+Shift+P,输入 “C/C++: Edit Configurations (UI)”,在弹出的配置界面中,将 “Compiler path” 设为 “C:mingw64bing++.exe”,这样 C++ 代码就能顺利编译。
Linux 用户则方便许多,大多系统自带 GCC 编译器,若需更新版本,在终端输入 “sudo apt-get update && sudo apt-get install build-essential” 即可。于 VSCode 中打开 C++ 项目文件夹,它会自动识别编译器,若未识别,按上述快捷键操作,确认编译器路径无误。
Python 方面,无论是 Windows、Linux 还是 Mac,都需先安装 Python 解释器,建议前往官网(https://www.python.org/downloads/)下载 3.x 版本。安装完成后,在 VSCode 里,点击左下角的 Python 版本选择器,选中已安装的 Python 路径,就能开启 Python 代码之旅。写一段简单的机器人运动控制代码,像让机器人前进一段距离,运行后,机器人便会依指令行动,直观感受代码的 “魔力”。
(二)ROS 插件的奇妙赋能
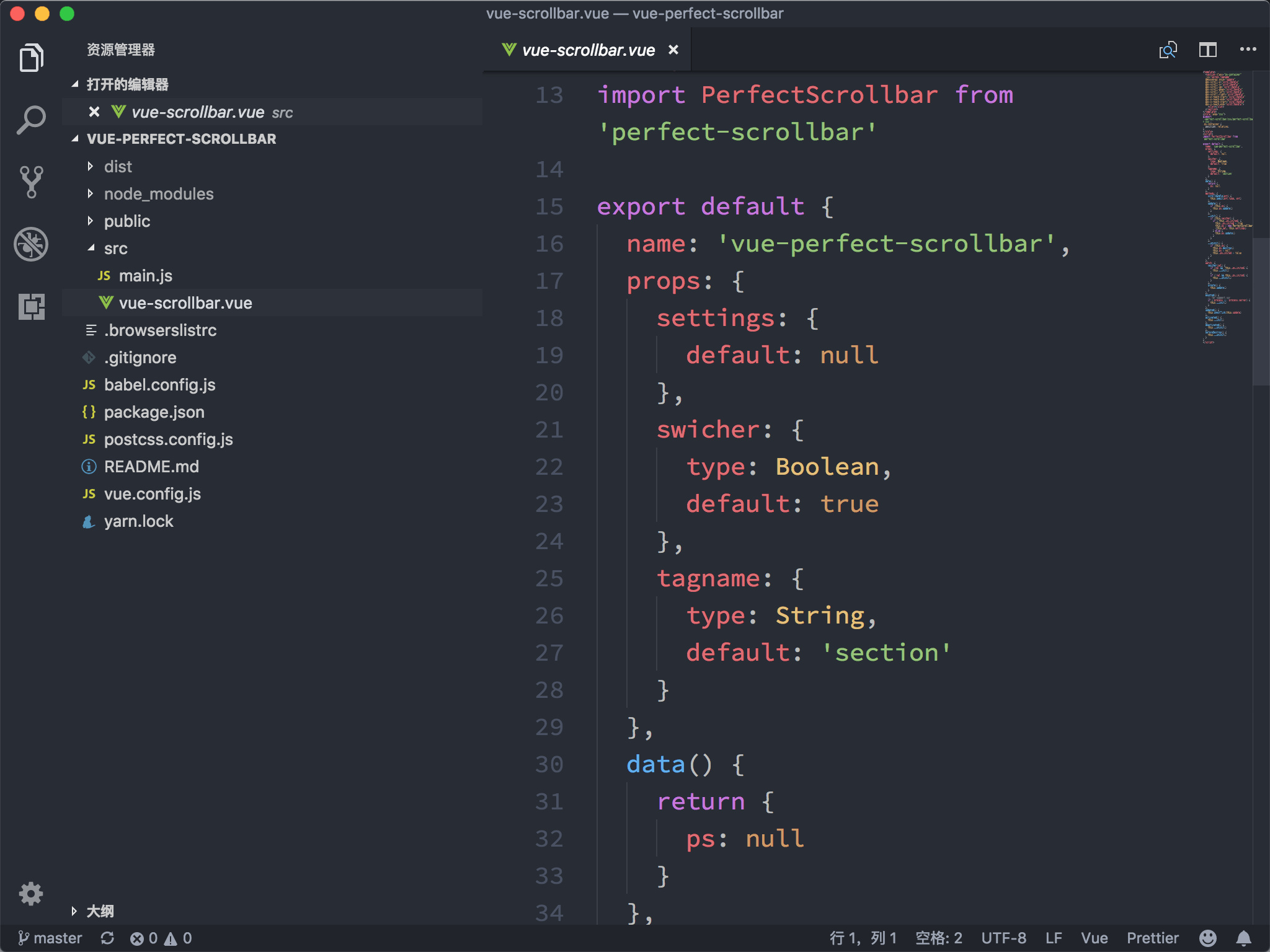
机器人操作系统(ROS)在行业里举足轻重,而 VSCode 的 ROS 插件更是让开发如虎添翼。安装好插件后,打开 ROS 工作区文件夹,VSCode 瞬间 “变身” 专业 ROS 开发环境。
创建 ROS 包时,在终端输入 “catkin_create_pkg [包名] [依赖包 1] [依赖包 2]…”,包就创建好了,且在 VSCode 资源管理器中清晰可见。管理 ROS 包,无论是查看包结构、编辑代码,还是添加新的功能模块,都能轻松搞定。
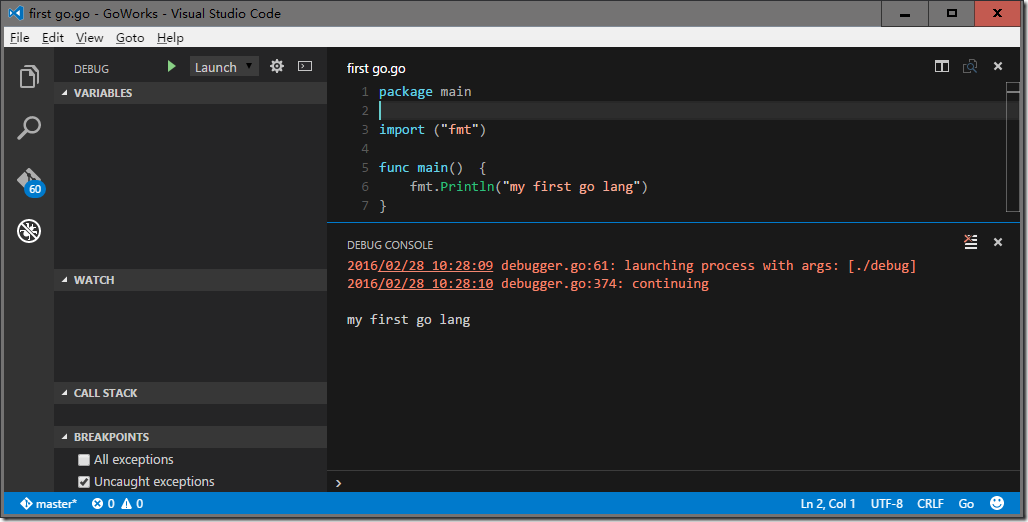
调试 ROS 节点堪称一绝,在 launch.json 文件中设置断点,点击调试按钮,就能像侦探一样,一步步揪出代码中的 “小毛病”,确保机器人的每一个动作都精准无误。
四、AI 代码插件来袭:效率飙升的秘密武器
(一)代码生成类插件精选
- 通义灵码:这可是阿里云推出的 “智能大脑”,基于通义代码大模型精心打造。当你编写机器人路径规划算法时,只需输入自然语言描述,比如 “实现 A * 算法寻找机器人从起点到目标点的最短路径,地图为二维网格,有障碍物”,它瞬间就能给出对应代码框架,你只需稍作调整,就能完美适配项目需求。它能实时感知代码上下文,给出精准续写建议,还能针对阿里云服务相关代码进行优化,如果你使用阿里云物联网平台连接机器人,通义灵码能帮你快速生成设备连接、数据上传的代码,大大加速开发进程。
- GitHub Copilot:由 OpenAI Codex 强力驱动,在编程界声名远扬。写自动驾驶的决策树算法时,你写下注释 “// 基于激光雷达数据构建决策树,判断前方是否有障碍物,若有则减速或转向”,Copilot 立马在下方给出完整代码片段供你参考。它就像你的专属编程伙伴,时刻依据上下文,提供个性化代码建议。不过,它是付费插件,每月费用约 70 元,但提供 60 天试用期,新手不妨先试用,感受其强大魅力,再决定是否长期使用。
(二)智能辅助类插件揭秘
- Bito AI:堪称全能助手!在开发机器人视觉识别系统时,你可以让它生成图像预处理代码,还能询问 “如何优化 Python 代码的内存占用,提升运行速度?” 它会给出专业建议。生成测试用例更是一绝,对于复杂的机器人运动控制函数,一键就能生成全面的测试场景,确保代码质量。实际场景中,当你调试机器人手臂运动轨迹出现偏差时,向 Bito AI 描述问题,它能帮你排查代码漏洞,快速纠错。
- IntelliCode:微软出品,必属精品。它利用机器学习算法,深度分析 GitHub 上海量开源项目以及你的代码习惯,为你提供贴心智能代码建议。在大型自动驾驶项目中,涉及众多模块交互,它能精准预测你所需代码,将常用且高质量的建议列为星级,优先展示。而且,它能根据团队开发风格不断优化,新成员加入团队后,使用 IntelliCode 能快速融入项目,遵循团队代码规范,提升整体开发效率。
五、更多宝藏插件挖掘:拓展编程边界
(一)代码格式化与规范类
在多人协作开发机器人或自动驾驶项目时,代码风格统一至关重要。Prettier 插件就是你的 “代码美容师”。安装后,在项目根目录创建.prettierrc.js 文件,配置参数:
module.exports = { semi: false, // 语句末尾不添加分号 singleQuote: true, // 使用单引号 trailingComma: 'es5', // 在对象、数组等结构末尾按 ES5 规范添加逗号 printWidth: 120, // 每行代码最大宽度为 120 字符 tabWidth: 4 // 缩进为 4 个空格 }; |
写一段复杂的机器人路径规划 Python 代码,未格式化前,缩进混乱、引号不一致;保存文件后,Prettier 自动格式化,代码瞬间变得整齐美观,像训练有素的军队,阅读起来轻松流畅,大大减少因风格差异导致的代码审查难题。
(二)版本控制类
对于团队项目,Git 版本控制不可或缺。VSCode 中的 Git 插件将复杂的 Git 操作简化。点击左侧的 “Source Control” 图标,就能看到文件变更列表。提交代码时,填写清晰的提交信息,如 “优化机器人视觉识别算法,提升准确率”,方便后续追溯。查看版本树,了解项目演进;对比文件差异,精准定位修改之处;创建、切换、合并分支,让新功能开发与 bug 修复并行不悖。假设要开发自动驾驶避障功能的新分支,点击分支图标,输入 “avoid-obstacle-feature”,瞬间创建分支,在新分支上尽情编码,完成后轻松合并回主分支,确保项目有序推进。
六、总结:编程进阶之路,从这里启航
至此,我们一同深入探索了 VSCode 在机器人与自动驾驶领域的编程秘籍,从基础安装到多语言适配,从 ROS 插件运用到 AI 代码生成,再到各类实用插件加持。掌握这些,如同给编程之路装上了 “涡轮增压”,代码编写更高效,调试纠错更精准,项目协作更流畅。希望大家赶紧打开 VSCode,动手实践,将这些技巧融入日常开发。未来,随着技术发展,相信会有更多强大插件涌现,助力开发者突破想象,创造出更智能的机器人与自动驾驶奇迹,让我们一起拥抱变化,持续探索代码世界的无限可能!



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











