






第五章 最小范数法
5.1 引言
读者将从第4章回忆起,相位展开的公共路径跟踪方法是从网格点开始,在覆盖整个阵列的路径上积分包裹相位差。正如我们在第2章中所解释的,如果包裹的相位数据包含残留点,则不可能毫无模糊地解开数据并在任何地方满足局部梯度假设。需要某种形式的干预才能使得展开唯一。路径跟踪方案显式或隐式地生成分支割或不连续线。而像Goldstein算法(第4.2节)和mask cut算法(第4.4节)这样的方案利用分支切口连接这些残留点。其他方案,如质量引导算法(第4.3节)和Flynn的最小不连续性算法(第4.5节),在不检测残留物的情况下生成不连续线。这些分支切割或线起到了阻止展开路径穿过线的屏障的作用。相位差可以大于线之间的π弧度。路径跟踪算法是相位解包裹的强大方法,应该是存储良好的相位解包裹技术库的一部分。
在这一章中,我们采取了一种完全不同的方法来展开相位。这种方法以数学形式的方式对解施加约束。具体地,我们给出了广义最小范数意义下的相位展开问题。我们寻找展开的相位,其局部导数与被测导数“尽可能接近”匹配。当我们提出广义误差范数时,“尽可能接近”这一术语将变得精确。
我们也会展示相位展开是如何可以转化为一个有权重和无权重的最小二乘问题的。最小二乘误差概念在形式上被称为L2意义上的最小范数。也就是说,解的梯度和测量梯度之间的平方差之和(积分)最小。最小二乘误差是一般的范数最小化问题的一个特殊情况,在这个问题中,我们可以自由选择P以满足我们的需要。
本章的算法,只要它们“将解曲面拟合到包裹的相位数据上”,在方法上与其他“曲面拟合”相位展开算法相似。例如,Tarayre、Massonnet和Sirat[4]通过覆盖网格或网格将输入相阵列划分为多个区域。它们迭代地构造了一个由小平面组成的表面,这些小平面的梯度与每个区域内的平均相位梯度相匹配。该算法的缺点是不能处理不连续性(例如由于剪切或SAR布局)在相位数据中,Labrousse、Dupont和Berthod[5]的算法通过最小化两个函数之和的能量函数来将曲面拟合到相位数据。第一个函数测量表面和包裹相位数据之间的差异。而第二个是“膜模型”,测量从一个连续的表面出发。通过模拟退火的方法解决了最小化问题。然而,这种方法还不成熟,而且从计算的角度来看代价极高。
本章的算法不同于这些曲面拟合算法,因为它们最小化了包裹相位梯度和解曲面梯度之间的差异。我们将包裹相位的梯度定义为简单的包裹相位的差分,但其他定义也是可能的[6]。这些梯度拟合算法的历史相当悠久,至少与二维相位展开的短暂历史有关。未加权最小二乘法,将包裹相位和解表面之间的梯度的平方和最小化,起源于1977年Fried[7]和Hudgin[8]的波前重建工作,随后将介绍最小二乘法的发展情况在章节5.3。最近的工作集中在最小二乘法的新公式上,如Fornaro、Franceschetti和Lanari 9]的Greens公式,以及对leastsquares方法进行改进的加权掩模方法,如Song等人的多重掩模方法。[l] ,Ghiglia和Romero的PCG方法[1],以及ITT(L1)的多重网格算法。后两种算法将在第5.4.3节和第5.4.4节中介绍。第5.5节中所介绍的p范数公式通过将加权最小二乘公式放在广义数学框架中使其成熟。
为了设置P范数相位展开方法的台阶。去检查一个简单的数据拟合问题的几个最小范数解是有帮助的。我们希望去寻找最好的直线拟合图5.1中的五个数据点。我们定义组好的拟合为直线,这样可以最小化通过如下公式所定义的误差:
其中,![]() 表示给定的数据点。我们必须寻找斜率a和偏移b来最小化这个和。
表示给定的数据点。我们必须寻找斜率a和偏移b来最小化这个和。
普通的最小二乘误差(p=2)解产生了如图5.1(a)所示的直线。注意的是单外点向直线压迫靠近来最小化二乘法误差。一般情况下,L2范数解并没有准确的通过每一个数据点。最小的绝对误差(p=1)解如图5.1(b)所示。外点非常小的影响着解并且这条线紧跟着其余的几点。因为给出的三个数据点是共线的,最小0范数解确实与这些点很匹配,如图5.1(c)。换句话说,最小0范数线在尽可能少的地方偏离数据。然而,因为任意两个点定义一条直线,其他的0范数解也是可能的,但是它们仅仅是局部最小值。其中一个局部最小解如图5.1(d)。根据问题的不同,可能有许多局部极小或相等的全局极小值。
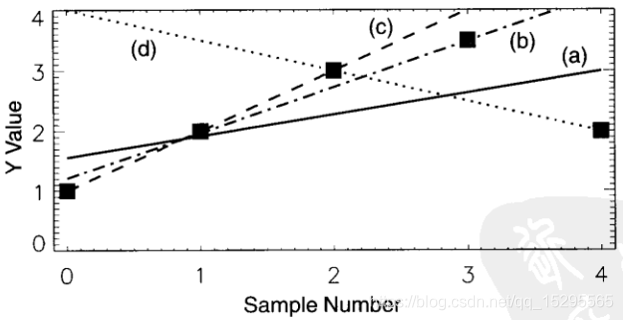
图5.1数据点集合的最小L“-标准线拟合解决方案。(a) 最小平方误差(p=2)解。(b)最小绝对误差(p=1)解)。(c)最小L0范数解,在这种情况下,因为三个数据点是共线的,所以这条线偏离可能最少的地方的数据。(d)任何其他可能的局部最小L-范数解之一
这一章的结构组织如下:在5.2节我们给出了相位展开最小p范数方法的数学公式。同时,我们也给出了对于通用的p的等式,之后的章节我们将着重放在p=2和p=0的情况。在章节5.3和章节5.4我们给出了很多p=2时的算法,我们也称为最小二乘法。章节5.3包括几个无权重最小二乘算法其中破坏的相位值没有被忽略。尽管这些算法在实际中是不合适的,由于破坏的相位值通常会破坏全局范围内的展开结果,它们是之后算法的基础。在章节5.4中,我们给出了几个权重最小二乘法能够给破坏的相位值0权重,并且得出准确解。如同质量引导算法一样,我们在第四章中研究,我们需要质量映射图或者掩码来定义权重。
在章节5.5我们给出了一个算法对于相位展开问题的一般的P范数解。因为这个算法产生了数据独立权重(如果p不等于2),它并不需要一个质量映射图来定义它们。就像章节4.5的Flynn最小不连续性算法。有没有质量映射图都可以使用。在我们的相位展开例子的算法评估中,我们只考虑p=0情况,在实际中会产生最好的结果。除了提供一个新的i香味展开算法,一般的p范数公式对于相位展开提供了一个有价值的角度去重新看这个问题。它揭示了未加权和加权最小二乘问题,并提供了一个相当令人惊讶的链接到路径跟踪方法,我们在第六章进行探索。


















 575
575

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









