









如图所示,一副不规则物体离散分布的灰度图,要想检测并标记。需要以下步骤:
1、 二值化,这个过程很简单
def thresh_img(img):
if img.ndim==3:
img=cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
img=cv2.medianBlur(img,3)
_,thresh=cv2.threshold(img,0,255,cv2.THRESH_BINARY_INV+cv2.THRESH_OTSU)
return thresh2、 利用opencv 中connectedComponents这个函数返回两个值,一个是标记总个数,从0开始,一个是标记的举证。其中,物体的个数==max(标记矩阵最大值)
def label_image(thresh):
h,w=thresh.shape[:2]
_,markers=cv2.connectedComponents(thresh)#返回两个值,一个是label总个数,一个是label后的矩阵吧
objects_total_number=np.max(markers)
print("总共有%g物体"%objects_total_number)
center_pts=[]# 存储每个label的坐标的重心作为对象重心
for i in range(1,objects_total_number):
temp=[[j,i] for i,j in zip(*np.where(markers==i))]
mean_pts=np.mean(temp,0)
center_pts.append([np.float32(mean_pts[0]),np.float32(mean_pts[1])])
return markers,center_pts3、 将灰度图转为色彩图,首先将标记矩阵值扩展到0-179之间作为HIS中H,S,I 分别等于与其同样大小的白色矩阵。再将HIS图像转为BGR即可
def gray_to_bgr_image(markers,center_pts):
h,w=markers.shape[:2]
hue_markers = np.uint8(179*np.float32(markers)/np.max(markers))
blank_channel = 255*np.ones((h, w), dtype=np.uint8)
marker_img = cv2.merge([hue_markers, blank_channel-50, blank_channel])
marker_img = cv2.cvtColor(marker_img, cv2.COLOR_HSV2BGR)
i=1
for pt in center_pts:
cv2.putText(marker_img,"%s"%str(i),(pt[0],pt[1]),cv2.FONT_HERSHEY_SIMPLEX,0.5,[0,0,0],2)
i+=1
cv2.putText(marker_img,"objects number is:%g"%i,(20,10),cv2.FONT_HERSHEY_SIMPLEX,0.5,[0,0,0],2)
cv2.imshow('Colored markers', marker_img)
cv2.waitKey(0)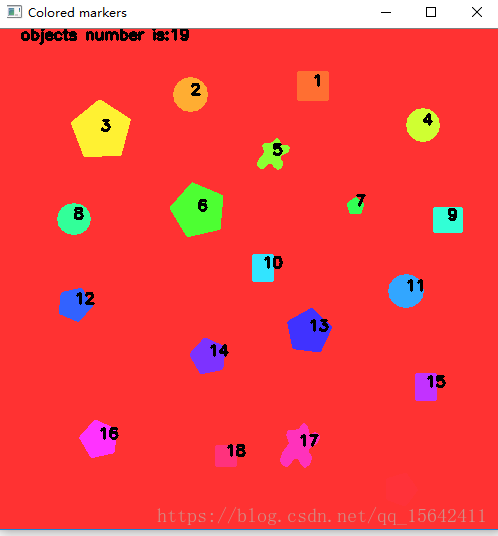
完整代码如下:
# -*- coding: utf-8 -*-
#discrete irregular objects detect and asssign color
import cv2
import numpy as np
from numba import autojit
@autojit
def thresh_img(img):
if img.ndim==3:
img=cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
img=cv2.medianBlur(img,3)
_,thresh=cv2.threshold(img,0,255,cv2.THRESH_BINARY_INV+cv2.THRESH_OTSU)
return thresh
def label_image(thresh):
h,w=thresh.shape[:2]
_,markers=cv2.connectedComponents(thresh)#返回两个值,一个是label总个数,一个是label后的矩阵吧
objects_total_number=np.max(markers)
print("总共有%g物体"%objects_total_number)
center_pts=[]
for i in range(1,objects_total_number):
temp=[[j,i] for i,j in zip(*np.where(markers==i))]
mean_pts=np.mean(temp,0)
center_pts.append([np.float32(mean_pts[0]),np.float32(mean_pts[1])])
return markers,center_pts
def gray_to_bgr_image(markers,center_pts):
h,w=markers.shape[:2]
hue_markers = np.uint8(179*np.float32(markers)/np.max(markers))
blank_channel = 255*np.ones((h, w), dtype=np.uint8)
marker_img = cv2.merge([hue_markers, blank_channel-50, blank_channel])
marker_img = cv2.cvtColor(marker_img, cv2.COLOR_HSV2BGR)
i=1
for pt in center_pts:
cv2.putText(marker_img,"%s"%str(i),(pt[0],pt[1]),cv2.FONT_HERSHEY_SIMPLEX,0.5,[0,0,0],2)
i+=1
cv2.putText(marker_img,"objects number is:%g"%i,(20,10),cv2.FONT_HERSHEY_SIMPLEX,0.5,[0,0,0],2)
cv2.imshow('Colored markers', marker_img)
cv2.waitKey(0)
if __name__=="__main__":
im=cv2.imread(r'C:\Users\Y\Desktop\w.png')
thresh=thresh_img(im)
markers,center_pts=label_image(thresh)
gray_to_bgr_image(markers,center_pts)














 865
865











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









