







 本文探讨了如何结合机载激光雷达和全景图像进行树种识别。激光雷达提供树冠信息,而全景图像提供树种和树干信息。通过数据融合,可以提高城市林业管理的效率和准确性。尽管面临如时间分辨率差异、精度挑战和复杂性等问题,但这种融合方法仍展示出潜力,并提出倾斜摄影测量和高光谱图像作为替代方案。
本文探讨了如何结合机载激光雷达和全景图像进行树种识别。激光雷达提供树冠信息,而全景图像提供树种和树干信息。通过数据融合,可以提高城市林业管理的效率和准确性。尽管面临如时间分辨率差异、精度挑战和复杂性等问题,但这种融合方法仍展示出潜力,并提出倾斜摄影测量和高光谱图像作为替代方案。
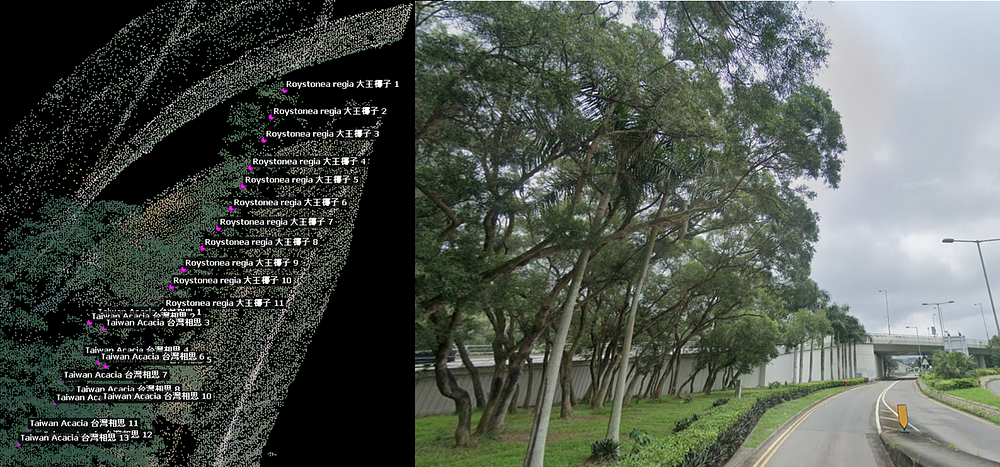
在城市林业领域,机载激光雷达测量的信息有限,它仅在点云结果中显示树冠以及植被和地面的一些返回。我们可以简单地使用聚类及其关联的几何形状来分割茂密而复杂的森林中的每棵树。尽管如此,机载激光雷达可能无法通过激光穿透指数或叶面积指数的简单计算轻松得出树种。
另一方面,近距离摄影测量现在变得更加流行,例如全景图像可以在谷歌地图中获取和链接。它可以通过360度捕获的图像将树木一一区分,但是这些图像在深度估计方面存在非常宽的镜头失真问题,没有捕获从相机视点到树的水平距离或垂直距离。目标,但从全景图像相机几何形状仍然可以得出一些对于树种识别过程有用的信息。
因此,现在是时候尝试整合两者的能力,通过遥感和摄影测量技术为复杂的城市林业管理系统制作数据融合原型。
我们如何将机载激光雷达和全景图像结合起来
机载激光雷达可以提供以下信息:
- Canopy 返回和点几何形状 (X,Y,Z)
- 可以确定冠层高度(最大Z - 地面Z)
- 树木的树冠分布(最小边界框,宽度+长度/2)
- 植被密度(来自激光穿透指数)
从全景图像中,它可以提供以下信息:
- 冠层坐标(通过线-线交点或基于矢量的方法)
- 分割的树种
- 树木状况和树干信息(例如共同主干)
通过从机载激光雷达和全景图像中检索信息,我们可以识别树种,并从数据融合过程中为树种库建立一些数据库。它可以加快数据准备过程
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











