







比较点云是处理和分析点云数据的关键步骤。然而,由于各个扫描之间固有的差异,无法进行逐点比较。因此,点云分析的第一步也是主要步骤是将点配对以进行有意义的比较。
配对点是区分表面变形和运动分析的关键任务。这个过程不仅为变形分析提供了见解,还使我们能够通过比较不同扫描样本之间的点来了解机载激光雷达数据中植被的生长速度。
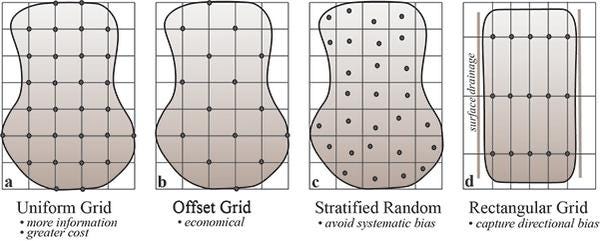
不同的网格采样方法
尽管网格采样是点配对的替代方法,但由于子采样过程(可能包括平均),它仍然会比点配对产生更粗糙的数据。
另一方面,与网格采样相比,点
比较点云是处理和分析点云数据的关键步骤。然而,由于各个扫描之间固有的差异,无法进行逐点比较。因此,点云分析的第一步也是主要步骤是将点配对以进行有意义的比较。
配对点是区分表面变形和运动分析的关键任务。这个过程不仅为变形分析提供了见解,还使我们能够通过比较不同扫描样本之间的点来了解机载激光雷达数据中植被的生长速度。
不同的网格采样方法
尽管网格采样是点配对的替代方法,但由于子采样过程(可能包括平均),它仍然会比点配对产生更粗糙的数据。
另一方面,与网格采样相比,点
 314
657
1163
314
657
1163











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
























