







1、安装可视化工具visdom
pip install visdom
2、安装依赖库
pip install opencv-python
3、打开visdom服务器,端口号设置为5123
python -m visdom.server -port=5123出现如下界面则表示可视化服务器运行成功了。

输入对应的IP地址,可以查看运行成功的可视化服务器。其中10.106.14.226是实验室服务器的IP地址。

4、运行torch网络,可视化深度特征
# python -m visdom.server -port=5123
# 第一帧初始化可视化服务器
if self._frame==1:
self.visini(5123)
# 读入图像序号
imagenum=str(self._frame)
imagenum=imagenum.zfill(4)
import cv2
image=cv2.imread('/data3/publicData/Datasets/OTB/OTB2015/Jogging/img/'+imagenum+'.jpg')
image = cv2.resize(image, dsize=(320, 240), interpolation=cv2.INTER_NEAREST)
# 注意cv2的图片是BGR,用visdom显示出来是RGB的,而且通道数在第一位。需要用图示方法进行转换。
# ...代表剩下的维度们,也可以放在前面,代表前面的维度们。
# 显示原图
self.viz.image(image.transpose(2, 0, 1)[::-1,...],win='x1',opts={'title': 'source image'})
# 显示特征
feat = x[0].mean(dim = 1)
feat = feat.unsqueeze(dim=1)
feat=torch.nn.functional.interpolate(feat, size = [image.shape[0], image.shape[1]], mode = 'bilinear')
feat = (feat - feat.min())/(feat.max() - feat.min())
self.viz.image(feat, win='x2',opts={'title': 'feat image'})
# 特征图伪彩色
featshow=feat.cpu().numpy()
featshow = np.uint8(255 * featshow[0][0])
featshow=cv2.resize(featshow, (image.shape[1], image.shape[0]))
featshow = cv2.applyColorMap(featshow, cv2.COLORMAP_JET)
self.viz.image(featshow.transpose(2, 0, 1)[::-1,...], win='x3',opts={'title': 'heatmap'})
# 特征图与原图融合
fusedImg = cv2.addWeighted(image, 0.7, featshow, 0.3, 0)
self.viz.image(fusedImg.transpose(2, 0, 1)[::-1,...],win='x4',opts={'title': 'fused image'})
其中x[0]为FPN第一层输出的特征,self.visini函数为:
# 初始化visdom,端口号与启用的相对应5123
def visini(self, portnum):
# python -m visdom.server -port=5123
from visdom import Visdom
self.viz = Visdom(port = portnum)
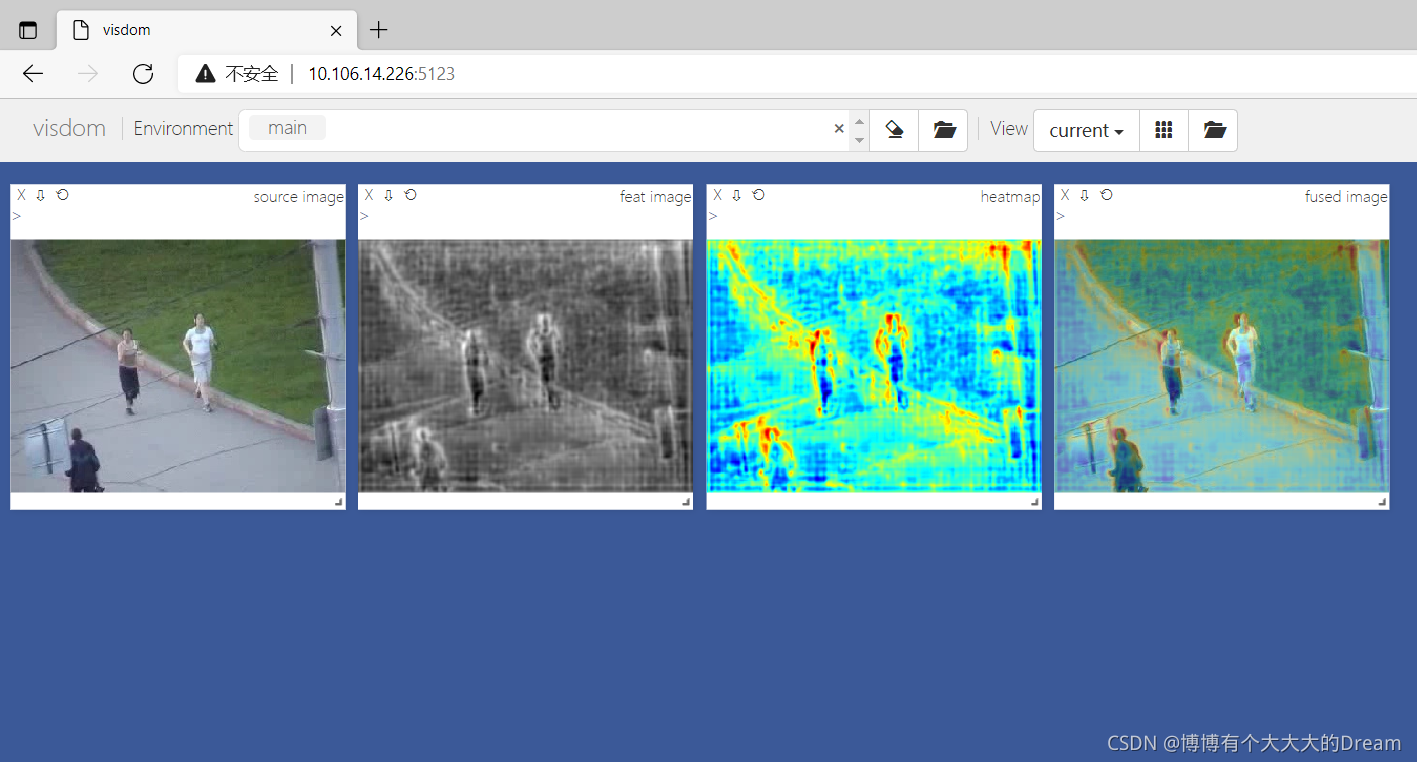
assert self.viz.check_connection()5、可视化结果
x[0]特征可视化结果
x[1]特征可视化结果

x[2]特征可视化结果

x[3]特征可视化结果

x[4]特征可视化结果
















 665
665











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









