







前言
在这篇paper,作者提出了一个更优雅的2D与3D之间转换的算法在自动驾驶领域,它不依赖于深度信息的预测,这个框架被称之为DETR3D。这个方法主要是为了葱多视角获取 scene-specific information,作者把首先生成3D的query,生成3d reference point,通过相机参数矩阵投影到2D拿到相应的2D feature。
主要贡献:
-
我们提出了一个基于RGB图像进行3D目标检测的改进模型。与现有的那些在最后阶段融合不同相机图像的目标预测的工作不同,我们的方法在每一层计算中都融合了所有相机的信息。据我们所知,这是将多相机检测转换为3D set-to-set预测问题的首次尝试。
-
我们提出了一种通过逆几何投影将提取的2D特征和3D包络框预测连接在一起的模块。它不受二阶段网络不准确的深度预测的影响,并且通过将3D信息反投影到所有可用帧上来无缝使用多个相机的信息。
和Object DGCNN类似,我们的方法不需要后处理,比如融合每个图像或全局NMS,并且性能和现有基于NMS方法相当。在相机视野的重叠区域, 我们方法明显优于其它方法。 -
我们发布了代码来促进复现性和未来的研究。
Method
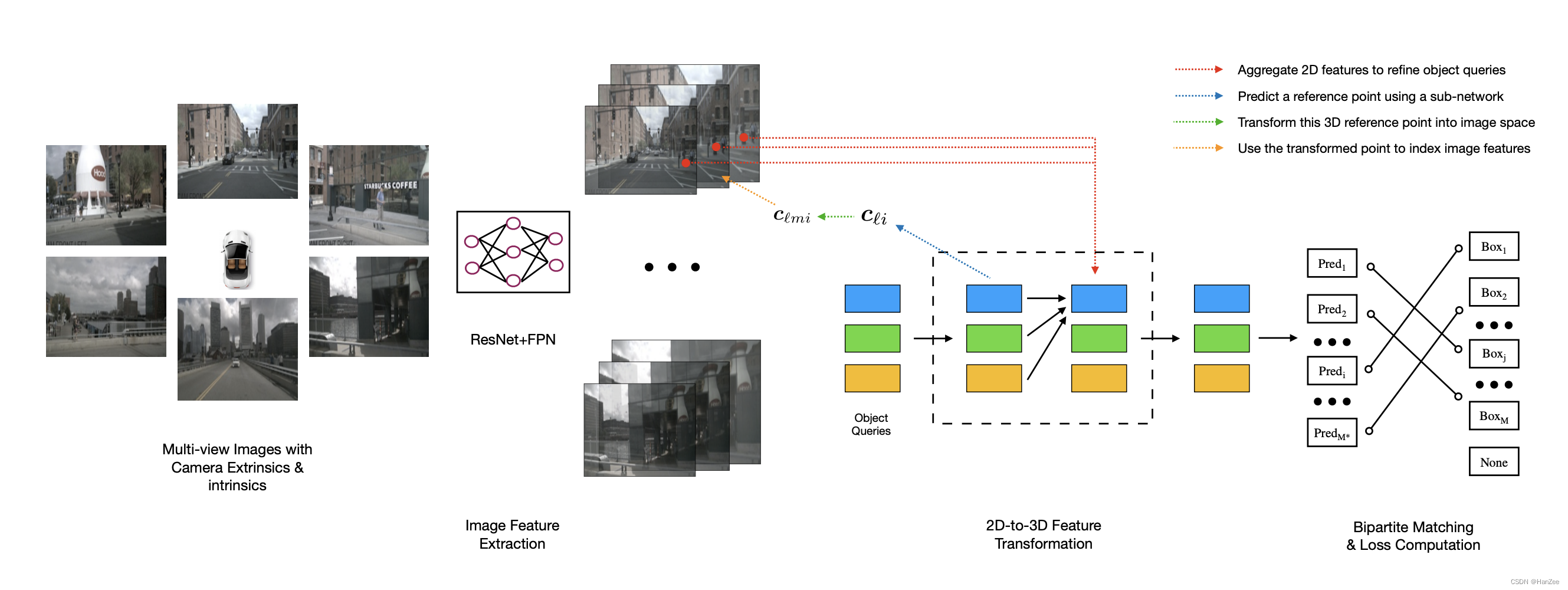
Image Feature Extracting
输入图像经过ResNet + FPN后生成了多尺度的特征图。
2D-to-3D Feature Transformation
目前已经存在的自底向上的方法会为每张image预测dense的 bounding box,并且需要一个post- processing 去处理,这种方法存在两个缺点:
- 依赖于depth 预测。
- NMS-based 方法不支持并行化。
作者为了解决上述问题,提出了自顶向下的方法,它的Decoder部分与Detr类似需要迭代六次,也可以理解为一共有6层,每一层的step如下:
-
随机生成 N个 object queries 并与 bounding box centre 关联。
-
把这些 centre point 通过 全连接层 生成BEV空间的 reference point,然后通过相机参数矩阵投影到2D 坐标。
-
获取从多尺度PV feature,这些2d坐标可能存在一些小数或者超过图像范围的值,前者利用bilinear interpolation ,后者通过二进制参数判断,越界置0,然后对同一个query映射到不同相机不同level的feature求和取均值。

-
第一步的另一个分支,把 N个object queries 通过 Self- Multi-head-Attention内部交互,避免不同的queries 预测同一个bounding box。
-
把 self attention输出的 query 与 2d image feature cross attention。
-
把 3 ,4 步结果相加获得下一层 object queries的input。
-
经过attention更新后的object query通过两个MLP网络来分别预测对应物体的class和bounding box的参数。
Loss
损失函数的设计也主要受DETR的启发,我们在所有object queries预测出来的检测框和所有的ground-truth bounding box之间利用匈牙利算法进行二分图匹配,找到使得loss最小的最优匹配,并计算classification focal loss和L1 regression loss。
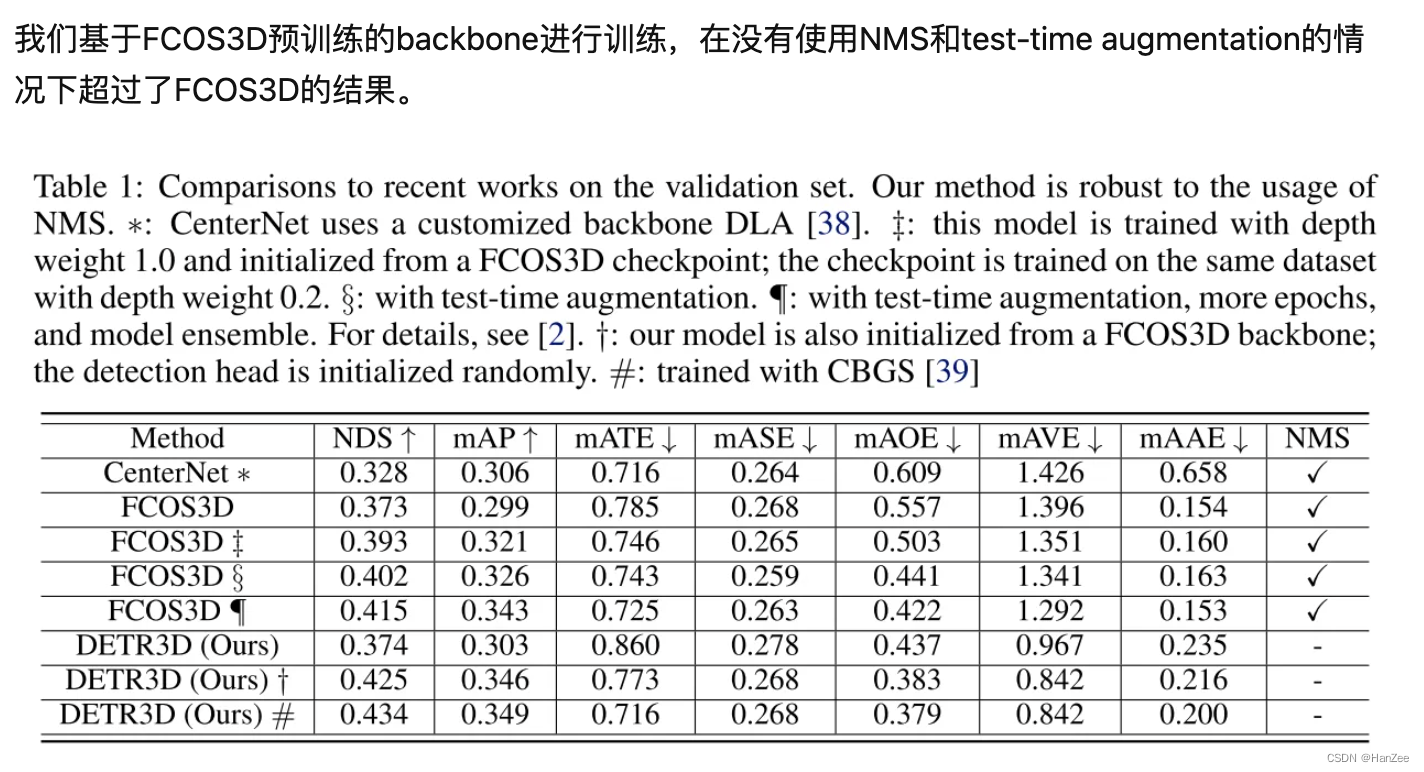
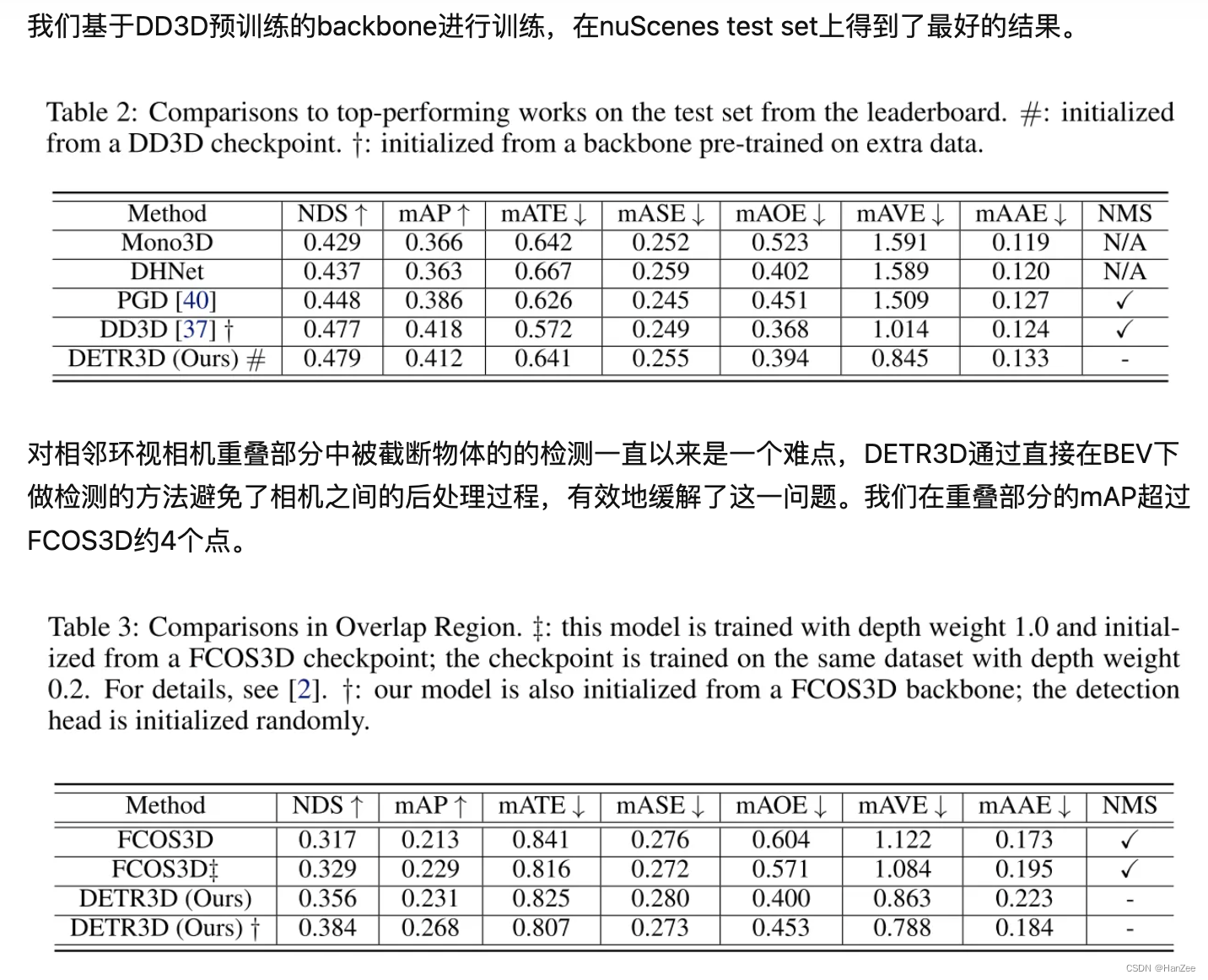
实验结果
















 1848
1848











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











