









逆的几何解释
矩阵的逆可以计算变换的反向或相反变换,能撤销原变换。向量
v⃗
用矩阵M进行变换,再用
M−1
进行变换,则会得到原向量。证明:
(v⃗ M)M−1=v⃗ (MM−1)=v⃗ I=v⃗
矩阵可逆性
不是所有的矩阵都有逆,其中最简单的判别方法就是:可逆矩阵的行列式不为0
标准伴随矩阵
假设有一可逆矩阵M,则标准伴随矩阵的定义是M的代数余子式矩阵的转置矩阵。
例如:
M=⎡⎣⎢−401−3243−2−1⎤⎦⎥
计算M的代数余子式矩阵:
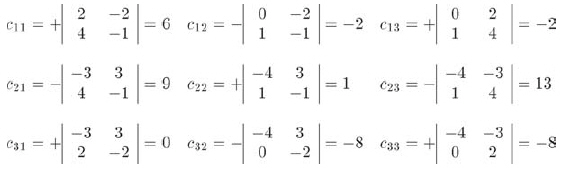
M的标准伴随矩阵是代数余子式矩阵的转置:
adjM=⎡⎣⎢c11c21c31c12c22c32c13c23c33⎤⎦⎥T=⎡⎣⎢690−21−8−213−8⎤⎦⎥T=⎡⎣⎢6−2−291130−8−8⎤⎦⎥
求逆
则有了标准伴随矩阵,通过除以M的行列式,就能计算矩阵的逆。
M−1=adjM|M|
则最后的有:
M−1=adjM|M|=⎡⎣⎢⎢⎢⎢⎢⎢⎢−14112112−38−124−132401313⎤⎦⎥⎥⎥⎥⎥⎥⎥
写在最后
还有很多的方法计算矩阵的逆,比如高斯消元法。很多线性代数的书认为该方法更适合在计算机上实现,这是相对于大矩阵和特殊矩阵来说的。对于低阶矩阵,如转置矩阵等,伴随矩阵能更快一些。















 16万+
16万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









