







最近在学习图像处理,课程是杜克大学的Image and Video Processing: From Mars to Hollywood with a Stop at the Hospita,原课程带中文字幕来自Coursera,此外B站有英文字幕的版本(看的话直接在两个网站搜名字就好了)。
本文仅仅是自己对所学内容的梳理,如果想学习请务必观看原视频,看不懂的话可以再来贴下讨论
本文仅仅是自己对所学内容的梳理,如果想学习请务必观看原视频,看不懂的话可以再来贴下讨论
第三章——图像增强
直方图均衡化
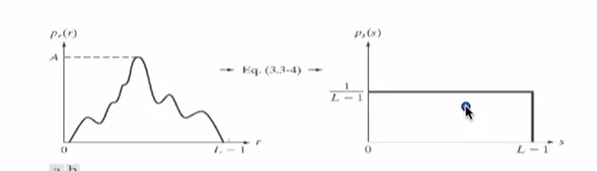
开始介绍了直方图的概念,第一个重点就是直方图均衡化,即将直方图变成均匀分布来实现图像很好的视觉表达效果。(见下图,即将分布直方图由左边变成右边)。教授给出了映射公式的推导。我又自己重新整理了一遍,因为懒得打字,直接放草稿,和教授证明方式略有不同。

直方图匹配
直方图匹配是建立在掌握均衡化的基础上进行的,目的是把图像的分布直方图映射到非均匀直方图的其他指定直方图上。大致流程见下图。

图像去噪
图像去噪就是各种滤波,这个相对简单且我专业用的比较多,我就挑1个要点说明一下:
非局部均值去噪
相关引用来自:非局部均值去噪(NL-means)
非局部均值(NL-means)是近年来提出的一项新型的去噪技术。该方法充分利用了图像中的冗余信息,在去噪的同时能最大程度地保持图像的细节特征。基本思想是:当前像素的估计值由图像中与它具有相似邻域结构的像素加权平均得到。

图像边缘增强
这个就是相邻像素之间在x方向或是y方向做差(也就是求导),可以凸显出图像边缘。如果在差值图像上重复操作就是二次求导,可以更凸显出图像边缘。引生出来的算法就是拉普拉斯算子,就是在x,y方向各求一次二次导数并加起来。算子模板见下图。

将得到的结果(边缘增强)与经过平滑(均值滤波)图像加起来,就称为反锐化掩膜(大致原理见下图)。

第四章——图像复原
这一章主要是深入讨论图像降噪,下面这个字迹潦草的公式就是我们要展开讨论的内容。H为卷积函数(也是退化函数),H后面的是噪声函数,该式一般是加上噪声,如果想要乘噪声只需要改为:
log(图像)+log(噪声)

几种噪声函数介绍及公式(简单扔张图)

利用图像灰度分布直方图去噪
可以看出包含不同噪声的图像直方图分布明显具有相应噪声的分布特点。

利用这种特点,我们可以根据图像直方图来识别相应噪声类型和特征。取出图像的一块看灰度分布,如果包含双峰时就切出一个峰(见下图)

当仅仅取一块无法判定噪声的准确特征时,我们可以取好多块(见下图),最后取特征平均

得到噪声特征后,通过拟合看误差的方式来判断噪声可以归属哪一类模型,并通过不同噪声类型选择不同的去噪方式。例如高斯噪声可以通过中值滤波来去除。
模糊函数H
这里开始讲述上述公式剩的那一个模糊函数,研究噪声是为了更好的降噪。同理,研究模糊函数也是为了更好的消除图像模糊的影响。这里举出了两种情况,一种是大气湍流引起的图像模糊,一种是拍摄物体处于运动状态带来的模糊。
先了解下基础知识
下图第一个式子就是原始清晰图像f经过h函数变换(模糊处理)得到图像g,当然这是我们的假设模型,我们的最终目的是在掌握图像模糊类型h的基础下,利用被模糊的图像复原清晰图像f。怎么得呢,这个式子不是简单的乘积我们不好直接将h除过去来求f,那怎么办呢?此时,我们要用到卷积定理:空间域两个函数的卷积的傅里叶变换等于两个函数的傅里叶变换在频率域中的乘积。(该式子的推导在百度百科上可找的到,很简单很详细——百度百科中卷积定理)
简单概括就是,将图像的卷积变成两个图像在频谱上的乘积,既然是乘积就可以得到F,之后再利用傅里叶逆变化得到我们想要的f就轻轻松松了吧~

首先也看看第一种情况
我们将大气湍流引起的图像模糊可以假设成高斯滤波带来的模糊效果,见下图。下图为一个点经过高斯滤波后变成了光斑。翻译里把这个点叫做δ函数,全称是狄拉克δ函数,用来解释物理量如点电荷在某一点的密度,我们理解成一个点也是没啥问题。在得知f(一个点)和g下,我们很容易求出模糊函数G,毕竟f只是一个点,该方法可以很好的估计模糊函数。我们可以以此办法在摄影时设置一个点用来估计拍摄结果的模糊程度。

第二种情况——运动模糊
教授没有直接给出运动模糊的模糊函数,而是根据运动模糊的定义给出了下图的方程。什么是运动模糊,运动模糊就是一系列物体运行轨迹叠加在一张图像上,这个叠加就是积分,每一个时刻的运动轨迹就是里面的f函数,这样子就可以很好的理解下面这个方程。教授说可以通过傅里叶变换来得到模糊函数,我没试。。

维纳滤波
在解释了模糊函数和噪声函数后,我们开始寻找解决方法,接着教授提出了维纳滤波,复原图像效果要比均值滤波等好。
最小均方差(维纳)滤波用来去除含有噪声的模糊图像,其目标是找到未污染图像的一个估计,使它们之间的均方差最小,可以去除噪声,同时清晰化模糊图像。
公式推导可以看这个图像去模糊(维纳滤波)
看不懂的话,看下面我的推导(我写的真的是很细了,虽然丑了点):

















 1536
1536











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









