






此主要讨论图像处理与分析。虽然计算机视觉部分的有些内容比如特 征提取等也可以归结到图像分析中来,但鉴于它们与计算机视觉的紧密联系,以 及它们的出处,没有把它们纳入到图像处理与分析中来。同样,这里面也有一些 也可以划归到计算机视觉中去。这都不重要,只要知道有这么个方法,能为自己 所用,或者从中得到灵感,这就够了。
8. Edge Detection
边缘检测也是图像处理中的一个基本任务。传统的边缘检测方法有基于梯度 算子,尤其是 Sobel 算子,以及经典的 Canny 边缘检测。到现在,Canny 边缘检 测及其思想仍在广泛使用。关于 Canny 算法的具体细节可以在 Sonka 的书以及 canny 自己的论文中找到,网上也可以搜到。最快最直接的方法就是看 OpenCV 的源代码,非常好懂。在边缘检测方面,Berkeley 的大牛 J Malik 和他的学生 在 2004 年的 PAMI 提出的方法效果非常好,当然也比较复杂。在复杂度要求不高 的情况下,还是值得一试的。MIT的Bill Freeman早期的代表作Steerable Filter 在边缘检测方面效果也非常好,并且便于实现。这里给出了几篇比较好的文献, 包括一篇最新的综述。边缘检测是图像处理和计算机视觉中任何方向都无法逃避 的一个问题,这方面研究多深都不为过。
[1980] theory of edge detection
[1983 Canny Thesis] find edge
[1986 PAMI] A Computational Approach to Edge Detection
[1990 PAMI] Scale-space and edge detection using anisotropic diffusion
[1991 PAMI] The design and use of steerable filters
[1995 PR] Multiresolution edge detection techniques
[1996 TIP] Optimal edge detection in two-dimensional images
[1998 PAMI] Local Scale Control for Edge Detection and Blur Estimation
[2003 PAMI] Statistical edge detection_ learning and evaluating edge cues
[2004 IEEE] Edge Detection Revisited
[2004 PAMI] Design of steerable filters for feature detection using canny-like criteria
[2004 PAMI] Learning to Detect Natural Image Boundaries Using Local Brightness, Color, and Texture Cues
[2011 IVC] Edge and line oriented contour detection State of the art
翻译
使用类似于Canny的准则的用于特征检测的可操纵滤波器的设计——http://tongtianta.site/paper/56199
作者:Mathews Jacob, Member, IEEE, and Michael Unser, Fellow, IEEE
摘要 -我们基于类Canny准则的优化,提出了从一类可操纵函数设计2D特征检测器的通用方法。与以前的计算设计相比,我们的方法是真正的2D并提供具有闭式表达式的过滤器。与传统的梯度检测器或基于Hessian的检测器相比,它还产生了具有更好的方向选择性的算子。我们用算子的边缘和脊检测设计说明了该方法。我们提出了一些实验结果,证明了这些新特征检测器的性能提高。我们提出了计算效率高的局部优化算法,用于特征方向的估计。我们还介绍了形状自适应特征检测的概念,并将其用于图像角点的检测。
索引词-可操纵,特征,边缘,检测,山脊,轮廓,边界,线条。
1 引言
在关于计算边缘检测的开创性论文中,Canny确定了特征检测器的理想质量,并提出了适当的最优性标准。基于此标准,他开发了一种通用方法来针对特定图像特征(例如边缘)推导最佳检测器[1]。这项工作对现场产生了重大影响,并刺激了该领域的进一步发展,特别是在替代性最佳标准和设计策略上[2],[3]。以上所有作者都考虑了最佳一维算子的推导。对于2D图像,他们应用正交于特征边界的最佳1D算子,同时沿垂直方向(沿边界)平滑。此扩展等效于计算图像与2D参考模板的一系列旋转版本(最佳1D轮廓和平滑内核的张量积)之间的内积。使用此检测器,产生最大内积的模板旋转角度将给出特征方向。由于最佳一维模板没有明确的公式,因此通常使用高斯简单的一阶或二阶微分对其进行近似。在实践中,它们可以使用具有相同方差的高斯核进行扩展,因为通过平滑图像梯度或Hessian的计算,可以廉价地以定向方式应用生成的2D模板。
Freeman和Adelson在可操纵滤波器上的出色工作提供了这些差分方法的独立于旋转独立特征检测的替代方法[4]。 基本原理是从基本滤波器的合适线性组合中生成滤波器的旋转形式。 这在允许的滤波器类别上设置了一些角度带限约束。 Perona等人,Manduchi等人,Simoncelli和Farid以及Teo和Hel-Or使用此框架来近似和设计方向选择特征检测器[5],[6],[7],[8]。 可净化性的概念也成功应用于图像处理的其他领域,例如纹理分析[9],[10]和图像去噪[11]。
在本文中,我们提出了通过提出二维可控特征检测器设计的通用策略来调和计算方法和可控滤波器组这两种方法。与Canny等人的1D方案(1D优化,然后扩展到2D)相反,我们直接以2D导出滤波器。而且,与Perona [5]的工作相反,我们不在可控解空间内近似给定模板,而是根据最优准则搜索能够给出最佳响应的滤波器。指定我们的滤波器是为了在信噪比,错误检测和定位方面提供最佳折衷。我们通过设计最佳的边缘和山脊模板来说明该方法。我们通过分析获得的检测器具有更好的性能和改进的方向选择性,但是它们在计算上仍然很有吸引力。
本文的结构如下:在第2节中,我们介绍了可控匹配滤波的概念,并在此框架内重新解释了一些经典的检测器。在第3节中,我们提出了一个最优性准则,并展示了如何从一类可操纵函数中确定最佳滤波器。在第4节中,我们将重点介绍特定的2D特征检测器,并演示其在不同应用中的使用。尽管我们的算法是通用算法,但在本文中,我们仅专注于边缘和山脊特征的检测。在第5节中,我们介绍形状自适应特征提取的概念,并通过示例进行说明。
2 方向独立匹配过滤
2.1通过旋转匹配滤波进行检测

图1.特征模板示例。 通过将模板的旋转版本与图像卷积来执行特征检测。 (a)理想化的边缘模板。 (b)理想的脊模板。 (c)流行边缘模板。 (d)流行的山脊模板。
假设我们的任务是在未知位置和方向上检测图像f(x,y)中的某些特征。 可以将检测过程表述为旋转匹配滤波。 它涉及在图像的每个点上使用二维特征模板的偏移和旋转版本f0(x,y)= h(-x,-y)计算内积。 内积的高值表示特征的存在,并且相应模板的角度给出了方向。 模板的一些简单示例如图1所示。在数学上,估计算法为
其中是r* 特征的大小, *是特征在位置x=(x,y)的方向;
*是特征在位置x=(x,y)的方向; 是旋转矩阵
是旋转矩阵
u*v代表u和v之间的卷积。等式(1)和(2)对应于匹配滤波器检测。 他们给出了信号模型的角度和权重r 的最大似然估计

其中 n(x) 表示高斯白噪声。但是,这种检测方案不是很实用,因为它需要实现大量的滤波器(与角度的量化级别一样多)。
2.2转向过滤器
为了减少计算量,我们在Freeman和Adelson [4]提出的可转向滤波器类别中选择检测器。通过采用少量过滤器的适当线性组合,可以非常有效地旋转这些过滤器。具体来说,我们考虑以下形式的模板
其中g(x,y)是任意各向同性的窗口函数。我们称这样的h(x,y)为第M个订单检测器。
命题1.滤波器h(x,y)是可操纵的。 换句话说,信号f(x,y)与h(x,y)的任何旋转形式的卷积可以表示为
其中函数fk,i(x,y)是信号f(x,y)的滤波版本
方向相关的权重bk,i()由下式给出
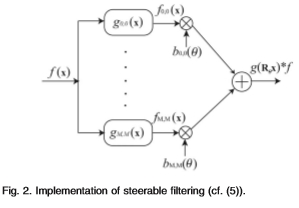
图2.可控过滤的实现(参见(5))。
该证明在附录A中给出。该实现的图形表示在图2中给出。一旦fk,i(x, y)可用,就可以通过加权和及其系数为的三角多项式的系数来非常有效地评估f(x)*h(x)。由于一般第M个订单模板的(5)中的偏微分数量是M(M+3)/2,因此h(x) 可以根据许多单独的可分离函数进行操纵。通过一些简化,我们可以显示出,也可以使用2M+1 不可分离的过滤器1来旋转这样的常规h(x)(这种简化的示例由(39)-(42)给出)。
1.这是引导常规第M个订单模板所需的最少过滤器数。
一个特殊的情况对应于g(x) 是高斯。实际上,就不确定性原理而言,高斯分布是最优的,(6)中的相应滤波器都是可分离的。有趣的是,高斯族等效于[4]中讨论的矩滤波器(多项式乘以高斯窗)的类,但是滤波器并不相同。现在我们将显示由(4)描述的族包括一些流行的特征检测器作为特殊情况。
2.3再探常规探测器
2.3.1 Canny边缘检测器
正如Freeman和Adelson所观察到的那样,可以根据可控滤波器重新解释广泛使用的Canny边缘检测算法[4]。该算法涉及高斯平滑图像的梯度幅度的计算。渐变的方向给出了边缘的方向。在数学上,
其中 ,g是具有指定方差的2D高斯。使用h=gx,上述方程组可以显示为(1)和(2)的解。用(7)替换M=1;
,g是具有指定方差的2D高斯。使用h=gx,上述方程组可以显示为(1)和(2)的解。用(7)替换M=1; 我们得到
我们得到 。从而,
。从而,

在这里,我们使用了(5)中gx的可操纵性。 为了计算上述表达式的最大值,我们将(11)相对于的微分设为零:

结果为(8)和(9)。相应的特征模板如图1c所示。
2.3.2 岭探测器
鲜为人知的事实是,基于Hessian矩阵[12],[13],[14]的特征分解的流行岭估计器也可以用可控滤波器来解释。假设模板为(高斯的二阶导数),则可以将峰检测精确地公式
为(1)和(2)。相应的检测器如图1d所示。在这种情况下,可操纵性关系(5)可以用矩阵形式表示为
 是Hessian矩阵,
是Hessian矩阵, 。使用卷积线性,
。使用卷积线性,
 。我们希望在约束
。我们希望在约束 的情况下获得
的情况下获得 的最大值。我们通过
的最大值。我们通过
 的梯度设置为零来使用拉格朗日乘数法解决此受限优化问题:
的梯度设置为零来使用拉格朗日乘数法解决此受限优化问题:

 是
是 的特征值;相应的归一化特征向量是该问题的可能解决方案。由于我们正在寻找
的特征值;相应的归一化特征向量是该问题的可能解决方案。由于我们正在寻找 的最大值,因此最佳响应和角度为
的最大值,因此最佳响应和角度为

在这里, 和
和 分别是最大特征值和对应的特征向量。
分别是最大特征值和对应的特征向量。
从图2和图3可以看出。从图1c和1d可以看出,这些经典的探测器没有很好的方向选择性。在下一部分中,我们提出了一种用于检测器设计的新方法,该方法试图纠正这一缺陷。
3 用于特征检测的可转向滤网的设计
广泛使用的轮廓提取算法[1]包含三个步骤:1)特征检测,2)非最大抑制和3)阈值化。在本节中,我们牢记后续步骤,介绍了设计用于特征检测的可操纵滤波器的一般策略。我们提出了一个与Canny相似的准则,并且在由(4)指定的特定类的可操纵函数中,我们分析性地得出了最佳滤波器(或等效地,最佳权重)。
3.1最优标准
现在,我们回顾一下Canny的标准,并对其进行一些修改以实现分析优化。为了推导最佳2D算子,我们假设特征(边缘/脊)沿某个方向2定向(例如,沿x轴),并推导用于对其检测的最佳算子。由于操作员可以通过构造进行旋转操纵,因此其最佳特性将与特征方向无关。
2.在2D中,感兴趣的特征具有尺寸1的边界。
Canny准则中的三个不同术语如下。
3.1.1信噪比
该标准中的关键术语是信噪比。滤波器h(x)对以原点为中心的特定信号f0(x)(例如,理想边沿)的响应为
S由响应的最大值给出。如果输入因单位方差的附加白噪声而损坏,则输出噪声的方差由滤波器的能量给出:
对于给定的噪声值,我们希望具有较高的S值;  是检测器提供的所需特征的放大。
是检测器提供的所需特征的放大。
3.1.2本地化
在检测阶段之前是非最大抑制。 估计的特征位置对应于响应的最大值在正交于特征边界(在本例中为y轴)的方向上的位置。 噪声的存在会导致估计的特征位置发生不希望的偏移。 Canny表达式将位移方差(由于单位方差的白噪声)直接扩展为2D
Canny提议最大限度地增加该术语的倒数。(19)的分子是一个归一化项,如果滤波器的脉冲响应沿y轴平滑(导数的范数较低),则该项将自动变小。由于我们通过其他正则化项(请参见下一节)在其他地方强加了这种平滑度约束,因此在此处不必优化此项,这也可以使效果保持良好的分离。因此,我们建议在原点处最大化与边界正交的响应的二阶导数
它是(20)中分母的平方根。确保上面的表达式为正,因为响应的二阶导数最大为负(假设S>0)。请注意,新的本地化术语是对峰宽的度量。随着响应变尖锐,由于噪声引起的最大值位置漂移将减小。在这项工作中,我们在推导定位项时忽略了邻近特征的影响。
3.1.3消除错误的振荡
Canny观察到,当仅使用SNR和定位约束条件对准则进行优化时,最优算子具有较高的带宽。该响应将是振荡的,因此有许多错误的最大值。在2D中,我们希望响应相对没有正交于特征边界的振荡。这可以通过惩罚以下术语来实现:

请注意,该术语是Canny提出的零交叉之间平均距离的表达式的分子。这是薄板样条样的正则化,这是将解决方案约束为平滑(低带宽)的标准技术。
如果响应沿边界平坦,则阈值化步骤会更容易。沿边界(x轴)的响应振荡可以通过惩罚最小化

这些术语将迫使滤波器变得平滑,从而使响应的振荡更少,从而导致更少的错误检测。
3.2最佳检测器的推导
我们将各个术语结合起来以获得单个标准
在约束3噪声= 1的条件下,由(4)描述的最大化此标准的族中的滤波器是我们的最佳检测器。 自由参数u> 0控制滤波器的平滑度; 较高的值会使响应不太容易出现错误的最大值,并减少沿脊的振荡。 但是,这些属性会折衷响应的本地化。
3.此约束只是一个归一化因子。将噪声设置为另一个常数将使探测器的形状相同,但能量不同。
在这项工作中,我们还对执行比例缩放感兴趣,要求使用适当的膨胀因子幂对(23)中的每个项进行加权。稍后将分别针对每个要素模型讨论此问题。
为了便于说明,我们将(4)的分量函数收集到长度为 的函数向量g中,其分量为
的函数向量g中,其分量为

因此,族中的任意函数以紧凑形式表示为

 的向量;它与函数向量的长度相同。现在,我们以矩阵形式将标准的术语表示为
的向量;它与函数向量的长度相同。现在,我们以矩阵形式将标准的术语表示为 ,
, ,
, 和
和 ,其中
,其中
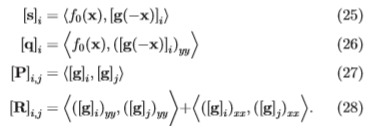
 和
和 分别表示
分别表示 和
和 。P和R是大小为
。P和R是大小为 的矩阵,而向量q和s的长度为
的矩阵,而向量q和s的长度为 。在此,确保P为非奇数。
。在此,确保P为非奇数。

因此,标准(23)可以矩阵形式表示为
由于标准中的所有项都是二次项,因此可以使用拉格朗日的乘数法来分析找到最优参数的解。
为了最大化约束条件下,我们将 的梯度设置为零:
的梯度设置为零:

重新排列条款,我们得到

这意味着 是矩阵
是矩阵 的特征值。特征值的总数由a的维数给出。 需要缩放对应的特征向量
的特征值。特征值的总数由a的维数给出。 需要缩放对应的特征向量 ,以便满足约束条件
,以便满足约束条件 。 因此,最佳解为
。 因此,最佳解为

因此,最佳特征检测器的设计归结为本征分解,然后对本征向量进行适当的加权以满足约束。
3.3通过局部优化进行特征检测
由于(5),获得(1)中的最佳角度 作为解决方案:
作为解决方案:

从(7)中可以很容易地看出,bk,i()中的每个项在cos()和sin()中都是k度; ck也是k度。 因此,(34)是阶数为M的多项式(分别为cos()和sin()),因此,最佳
角度的估计涉及两个变量中第M阶多项式的解。
如果h(x,y)仅具有奇数/偶数阶偏导数(许多检测器就是这种情况),则 将是仅存在(cos()和sin()的)奇数/偶数项的多项式。 因此,可以将(34)减少4 到仅存在度M项的形式。 在这种情况下,(34)可以进一步简化(通过将两边除以cos()M)到仅一个变量tan()中的多项式。 如果M <= 3 [15],我们就有一个解析解。 这种情况在第4.1.3节中有说明。 当M = 2时,该解也可以被计算为Hessian矩阵的本征分解,这是众所周知的(但也归结为上述解)。 这种情况在第4.2.2节中描述。 当(34)的解在分析上无法跟踪时,可以使用迭代根查找器(例如Newton-Raphson方法)在数值上求解。
将是仅存在(cos()和sin()的)奇数/偶数项的多项式。 因此,可以将(34)减少4 到仅存在度M项的形式。 在这种情况下,(34)可以进一步简化(通过将两边除以cos()M)到仅一个变量tan()中的多项式。 如果M <= 3 [15],我们就有一个解析解。 这种情况在第4.1.3节中有说明。 当M = 2时,该解也可以被计算为Hessian矩阵的本征分解,这是众所周知的(但也归结为上述解)。 这种情况在第4.2.2节中描述。 当(34)的解在分析上无法跟踪时,可以使用迭代根查找器(例如Newton-Raphson方法)在数值上求解。
4.如果存在度数 的项,我们可以将其乘以
的项,我们可以将其乘以 以使其度数为M。
以使其度数为M。
现在,我们设计了用于检测不同2D特征的优化运算符。 我们选择窗口函数为高斯5 g(x, ),其中A为标准偏差。 从上下文中清楚看出来时,我们将抑制对的依赖以简化表示法。
),其中A为标准偏差。 从上下文中清楚看出来时,我们将抑制对的依赖以简化表示法。
5.它是各向同性和可分离的唯一功能。
4.1边缘检测
作为边缘的模型,我们选择理想的阶跃函数

由于它是y的奇数函数,因此偶数阶导数对信号能量无贡献;因此,我们在(4)中忽略了它们。
4.1.1情况1:M = 1
为了说明最佳滤波器的推导,我们在这种简单情况下详细解释了所有步骤。 将函数向量g = [gx,gy]替换为相应的表达式,我们

无关,而R与 成反比。因此,我们通过
成反比。因此,我们通过 对R进行加权,以获得尺度不变的解决方案。因此,
对R进行加权,以获得尺度不变的解决方案。因此,

 的特征值分别为
的特征值分别为 和
和 。 相应的缩放特征向量(以便满足约束)是
。 相应的缩放特征向量(以便满足约束)是
分别。 当替换为标准时,它们分别产生4- 18u和-18u。 因此,最佳解决方案是
(如 ),它对应于Canny的边缘检测器(参见图1c)。
),它对应于Canny的边缘检测器(参见图1c)。
4.1.2 高阶情况
我们获得了一系列的解决方案,这些解决方案在u上升时会越来越平滑。表1给出了一些高阶模板的示例,滤波器脉冲响应如图3所示。通过比较图。在图3b和3c中,我们观察到增加,滤波器变得更平滑,但方向性却
有所损失。高阶模板更加细长,因此具有更高的SNR和定位度(参见表格1);因此,它们应能带来更好的检测效果,至少可以理想化边缘。SNR对 的依赖性表明,也可以通过增加高斯方差来改善此数字。但是,解析两个
的依赖性表明,也可以通过增加高斯方差来改善此数字。但是,解析两个
相邻的平行边的能力会随着的增加而降低。

图3:不同参数的边缘检测器。 随着M的增加,检测器的定向选择性更高。 (a)坎尼的边缘检测器。 (b)M = 3; u = 0.09。 (c)M = 3; u = 0:2。 (d)M = 5; u = 0.15。
表1.用于不同参数的边缘检测器

4.1.3实施
在这里,我们针对三阶边缘检测的特殊情况开发了第3.3节中提到的实现过程。通用的三阶边线模板(针对u的不同值)由下式给出

此模板 的旋转版本7由下式给出
的旋转版本7由下式给出
通过f对旋转的模板进行卷积并简化,我们得到
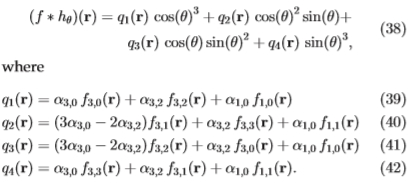
我们将 和
和 中的单度项与
中的单度项与 相乘,从而得到具有只有三等学位。请注意,通过可分离的过滤获得的六个函数
相乘,从而得到具有只有三等学位。请注意,通过可分离的过滤获得的六个函数 组合起来可以得出
组合起来可以得出 。它们也可以通过不可分离的过滤获得:
。它们也可以通过不可分离的过滤获得:

由于其计算效率,我们使用可分离方法。不可分割的方法对于较大的M值可能会有利可图。
 是仅一个变量-的函数。在
是仅一个变量-的函数。在 的局部最大值和最小值处,我们具有
的局部最大值和最小值处,我们具有 。代替
。代替 从(38),我们得到
从(38),我们得到

我们将该方程的两边除以 ,以在一个变量
,以在一个变量 中获得三次多项式:
中获得三次多项式:

该方程的根可以通过解析获得[15]。 从 mod 2Π 开始,在[0, 2Π]范围内有六个可能的值满足(47)。 的这些值之一对应于全局最大值; 可以通过将它们全部代入(38)并选择一个给出最大值的值来找出。 我们在附录B中简要描述局部优化算法的步骤。
mod 2Π 开始,在[0, 2Π]范围内有六个可能的值满足(47)。 的这些值之一对应于全局最大值; 可以通过将它们全部代入(38)并选择一个给出最大值的值来找出。 我们在附录B中简要描述局部优化算法的步骤。
对于M> 3,对于M = 3估计的*可以用作近似解。 通过围绕近似解执行黄金搜索[15],可以进一步完善此初始猜测。
4.1.4 结果
因为该方案针对噪声数据进行了优化,所以我们对被附加白噪声破坏的摄影师图像执行边缘检测(参见图4a)。高斯窗口的大小在所有实验中都相同。非最大抑制和阈值化之后的检测边缘如图4所示。可以看出,Canny的边缘检测器有很多错误的检测结果。而且,由于不良的定位,检测到的边缘是摆动的。新的探测器的误检率大大降低,定位更好,从而证实了理论上的改进。
注意,从图1和图2的各种边缘检测方案花费的时间。 4b,4c和4d。 三阶方案仅花费Canny探测器的2.5倍时间。 我们认为,对于实现的性能改进,这是一个相当合理的代价。 由于我们诉诸于使用二分法的朴素优化算法,因此五阶方法花费了更多时间。 我们认为,更好的优化方案可以大大提高计算效率。
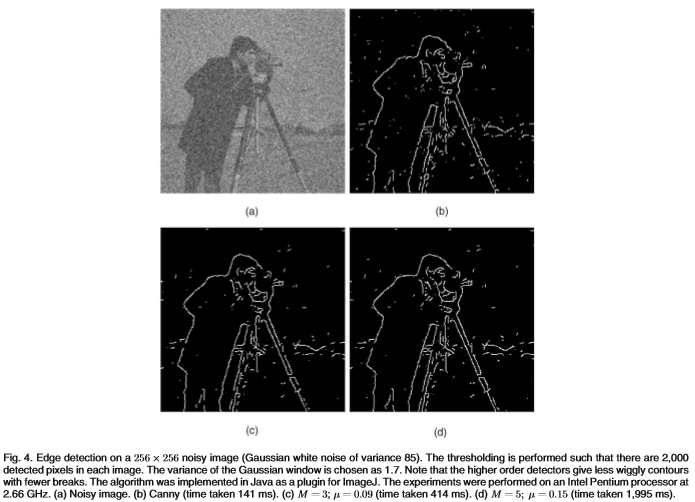
图4. 256 * 256噪声图像(方差85的高斯白噪声)上的边缘检测。 执行阈值处理,以使每个图像中检测到2,000个像素。 高斯窗口的方差选择为1.7。 请注意,高阶检测器给出的摆动轮廓较少,中断较少。 该算法在Java中作为ImageJ的插件实现。 实验是在2.66 GHz的Intel Pentium处理器上进行的。 (a)嘈杂的图像。 (b)Canny(耗时141毫秒)。 (c)M = 3; u = 0.09(耗时414 ms)。 (d)M = 5; u = 0.15(耗时1,995 ms)。
4.2脊检测
为简单起见,我们选择理想化的线模型为:
其中 表示狄拉克增量函数。 可以假设一个更现实的模型,而无需改变计算策略。 在此,Q,P和R分别与4,2和6成反比。 因此,我们按2缩放Q,按4缩放R。
表示狄拉克增量函数。 可以假设一个更现实的模型,而无需改变计算策略。 在此,Q,P和R分别与4,2和6成反比。 因此,我们按2缩放Q,按4缩放R。
4.2.1优化的探测器
 和
和 的最佳检测器在信噪比和本地化方面均优于传统检测器,且无额外成本。另外,
的最佳检测器在信噪比和本地化方面均优于传统检测器,且无额外成本。另外,
 的高值(已进行调整以获得等效值)过度约束了优化,从而导致性能降低。
的高值(已进行调整以获得等效值)过度约束了优化,从而导致性能降低。


图5.对应于不同顺序和参数的脊线检测器 (a)M = 2; u = 2(经典检测器)。 (b)M = 2; u = 0。 (c)M = 4; u = 0.1。 (d)M = 4; u = 0.25。
还显示了 的两种情况。可以看出,对于较小的α,模板沿y振荡,产生不希望的旁瓣。但是,它在降低SNR和R的代价。
的两种情况。可以看出,对于较小的α,模板沿y振荡,产生不希望的旁瓣。但是,它在降低SNR和R的代价。
一般而言,我们发现对于低阶模板,最好将u的值设置得较低。 该模型具有较少的自由度,因此,较高的u值会过度约束系统。 另一方面,对于高阶模板,我们需要较高的u值,以使其不那么振荡。
4.2.2实施
类似于经典的Hessian(在2.3节中描述),任何二阶检测器都可以实现为特征分解。 例如,检测器可以实现为

这样的 。因此,可以利用Hmod的特征分解来计算最佳方向和山脊大小。 计算复杂度与经典方案相同。
。因此,可以利用Hmod的特征分解来计算最佳方向和山脊大小。 计算复杂度与经典方案相同。
4.2.3结果
 检测器可提供最佳的定性结果:灯丝几乎没有断裂,并且检测不那么摇摆。请注意,性能改进成本仅为传统方法所需时间的两倍。对于与经典方法相同的计算复杂度,最佳二阶检测器给出了更好的结果。
检测器可提供最佳的定性结果:灯丝几乎没有断裂,并且检测不那么摇摆。请注意,性能改进成本仅为传统方法所需时间的两倍。对于与经典方法相同的计算复杂度,最佳二阶检测器给出了更好的结果。
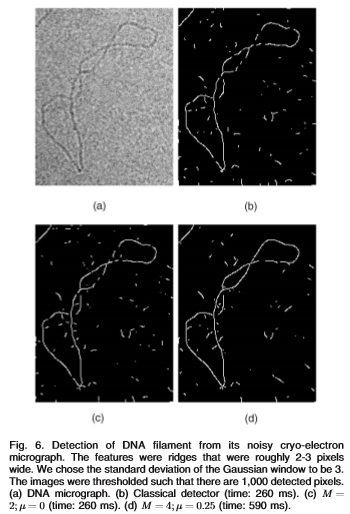
图6.从嘈杂的低温电子显微照片中检测DNA细丝。 特征是大约2-3像素宽的山脊。 我们选择高斯窗口的标准偏差为3。对图像进行阈值处理,以使检测到1,000个像素。 (a)DNA显微照片。 (b)经典探测器(时间:260毫秒)。 (c)M = 2; u = 0(时间:260毫秒)。 (d)M = 4; u = 0.25(时间:590毫秒)。
5形状自适应功能检测
旋转的可操纵性涉及将模板表示为几个过滤器的加权线性组合。权重是单个参数(角度)的非线性函数。这给我们留下了可以有效利用的额外自由度。Perona使用它来使模板可缩放[5]。我们建议利用这种自由度来设计形状适合的滤波器,从而使系统根据参数响应不同的形状。
在第4.14节中,我们设计了用于检测理想台阶边缘的模板。但是,如[16]中所述,边缘有时是楔形的(靠近图像角)。由于这与我们的假设相矛盾,因此我们在角落处的信噪比较低。在传统的拐角检测器的背景下,拐角的位置也有偏差[17]。
角是具有高表面曲率的图像区域。他们传达了很多有关图像形状的信息[18],[19],[20],[21]。因此,我们提出了一种新的形状适应性,可转向角检测器,以解决这些问题。
5.1楔形检测器的推导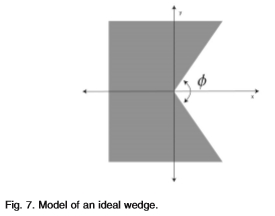
图7.理想楔形的模型。
我们将一个角建模为如图7所示的楔形,其中楔形角 为变量。 从分析上,我们有
为变量。 从分析上,我们有

我们专注于三阶角点检测器的推导。 由于三阶检测器不能振荡太多,我们将u设置为0。 我们还摆脱了定位项-为了获得一个简单的表达式,我们仅针对SNR优化了检测器。
将S噪声的梯度设置为零(在噪声= 1的情况下最大化S+入),我们得到

从中我们得到最优解
对于三阶检测器 和理想化的楔形模型,由(25)和(27)定义的P和s为
和理想化的楔形模型,由(25)和(27)定义的P和s为

用上述(52)代替,我们得到SNR优化的三阶模板为

 时,最佳的拐角检测器是Canny的边缘检测器。不同α值检测器的一些例子如图8所示。
时,最佳的拐角检测器是Canny的边缘检测器。不同α值检测器的一些例子如图8所示。
 = 0.6(108度)。 (b) = 0.8(144度)。 (c)= 1.2(216度)。 (d) = 1.4(252度)。
= 0.6(108度)。 (b) = 0.8(144度)。 (c)= 1.2(216度)。 (d) = 1.4(252度)。
5.2实施
 ,该模板现在由两个变量参数化:θ-方向-和-楔角。因此,检测过程涉及两个变量的优化。对于我们的实验,我们求助于一个稍微次优的解决方案,
是从
,该模板现在由两个变量参数化:θ-方向-和-楔角。因此,检测过程涉及两个变量的优化。对于我们的实验,我们求助于一个稍微次优的解决方案,
是从 解决方案估算的,并且是最优值通过抽样估算。这种方法是合理的,因为最佳角度相对于变化不大。
解决方案估算的,并且是最优值通过抽样估算。这种方法是合理的,因为最佳角度相对于变化不大。
5.3结果

图9.(a)S2 /噪声 与楔角。 (b) 的度量(偏差与高斯窗的标准偏差之比)。
的度量(偏差与高斯窗的标准偏差之比)。
现在,我们研究了楔形检测器相对于Canny边缘检测方案的理论性能改进。我们考虑了Canny的边缘检测器和针对楔形的最佳楔形检测器(针对特定的设计)的响应。在图9中,我们显示了SNR随楔角的变化。请注意,对于Canny的边缘检测器,与楔形检测器相比,SNR下降得更快。楔形检测器的SNR在周围有一个大约140度跨度的平坦区域。
为了分析位置偏差,我们考虑了楔形f0(x, y)(如图7所示)对模板的响应r(x, y)。最大值的位置将沿y轴偏离原点。位移的一阶近似可以通过使用响应r(x, y)=f0(x, y)*h(x, y) 沿y轴的泰勒级数展开获得:

 。从上面的表达式中,我们获得y的一阶表达式为
。从上面的表达式中,我们获得y的一阶表达式为 。代入
。代入 并利用卷积与微分的可交换性,我们得到
并利用卷积与微分的可交换性,我们得到

图9b中显示了不同楔角的偏置(y)图。可以看出,对于Canny的边缘检测器来说,楔形从实际位置的位移远大于调整到相应角度的楔形检测器的位移。
简而言之,对于一定角度范围的非理想阶梯边缘(楔形),楔形检测器的性能要优于边缘检测器;通过考虑使用更高阶的检测器,可以增加该范围。
为了证明该算法的实用性,我们考虑了图10a所示的合成图案和图10c所示的实像。我们估计最佳参数(θ和)和响应。我们对响应进行非最大抑制,并且仅将值保持在
一定阈值以上。的估计值响应大于阈值的情况如图2和图3所示。 10b和10d。注意,检测器可以基于估计角度的差异来区分凸楔和凹楔。楔形的估计位置也很适合其真实
位置。由于Canny的检测器也属于楔形检测器系列,因此该方案也适用于直边。

图10.检测到的楔角。 在此,红色代表 = 3Π/2,黄色代表 = Π,青色代表 = Π/2。 在这里,角是红色或青色的点。 注意,在直边处,最佳楔角为Π; 最佳检测器相当于Canny的边缘检测器。 在此实验中,我们选择了 =3。(a)噪点图像。 (b)楔形检测器的角度输出。 (c)房屋形象。 (d)楔形检测器的角度输出。
=3。(a)噪点图像。 (b)楔形检测器的角度输出。 (c)房屋形象。 (d)楔形检测器的角度输出。
6 结论
我们提出了一种通用方法来导出用于图像特征检测的最佳2D运算符。我们基于对Canny准则稍加修改的分析优化方案,从一系列可操纵函数中选择了最佳模板。与经典方法相反,在经典方法中,优化是在一维中执行的,我们直接在二维中指定了滤波器。我们推导了针对各种图像特征的最优算子,并展示了它们在各种应用中的效用。我们还介绍了形状自适应特征检测的概念,并将其用于图像角点的检测。
现在,我们讨论一些本文中未解决的问题,这些问题仍待进一步研究。
1.可操纵函数的类别:尽管我们将高斯导数作为可操纵家族集中在其空间上,但设计方法也适用于其他类别。有趣的变化可以通过更改窗口函数或使用其他已知的可转向函数系列来获得[7],[22]。
2.离散化:我们忽略了离散化问题而得出了连续空间中的最优算子。像[23]中那样处理离散化效应可能更有趣,使其更接近实际情况。
即使需要进一步的研究来解决这些问题,此处给出的结果也很有希望证明在各种实际应用中使用建议的检测器是合理的。该方法也足够通用,可以设计特定于应用程序的模板。
该算法的实现可作为http://bigwww.epfl.ch/demo/steerable/上的ImageJ [24]的Java插件获得。
附录A
证明:利用傅立叶变换的线性和微分与傅立叶域中与jw相乘的性质,很容易得出滤波器h的传递函数:

其中 。 由于滤波器在空间中的旋转对应于其傅立叶变换的旋转,因此我们得到
。 由于滤波器在空间中的旋转对应于其傅立叶变换的旋转,因此我们得到
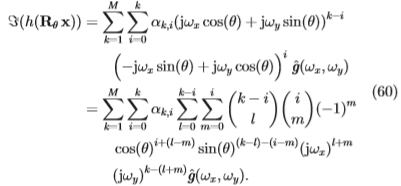
请注意,因为我们假设它是各向同性的,所以窗口函数保持不变。 现在,将双方都乘以 并计算傅立叶逆变换,我们得到
并计算傅立叶逆变换,我们得到
请注意,f的成分索引仅取决于k和l + m。 我们收集具有相同k-(l + m)值的项,并将S(k,i,j)定义为

使用此定义,我们将(61)的右侧重写为
附录B
在本节中,我们简要概述了三阶边缘检测算法中涉及的步骤。 我们表示具有指定方差的一维高斯,其一阶,二阶和三阶导数在某个网格上分别由g,g',g'和g''采样。

例程给出MaximumRoot将θ值代入(38); 它返回最大值和相应的角度。
参考文献
[1] J. Canny, “A Computational Approach to Edge Detection,” IEEE Trans. Pattern Analysis and Machine Intelligence, vol. 8, no. 6, pp. 679-698, 1986.
[2] S. Sarkar and K.L. Boyer, “On Optimal Infinite Impulse Response Filters,” IEEE Trans. Pattern Analysis and Machine Intelligence, vol. 13, no. 11, pp. 1154-1170, Nov. 1991.
[3] R. Deriche, “Fast Algorithms for Low-Level Vision,” IEEE Trans. Pattern Analysis and Machine Intelligence, vol. 12, no. 1, pp. 78-87, Jan. 1990.
[4] W.T. Freeman and E.H. Adelson, “The Design and Use of Steerable Filters,” IEEE Trans. Pattern Analysis and Machine Intelligence, vol. 13, no. 9, pp. 891-906, Sept. 1991.
[5] P. Perona, “Deformable Kernels for Early Vision,” IEEE Trans. Pattern Analysis and Machine Intelligence, vol. 17, no. 5, pp. 488-499, May 1991.
[6] R. Manduchi, P. Perona, and D. Shy, “Efficient Deformable Filter Banks,” IEEE Trans. Signal Processing, vol. 46, no. 4, pp. 1168-1173, 1998.
[7] E.P. Simoncelli and H. Farid, “Steerable Wedge Filters for Local Orientation Analysis,” IEEE Trans. Image Processing, vol. 5, no. 9, pp. 1377-1382, 1996.
[8] P.C. Teo and Y. Hel-Or, “Design of Multi-Parameter Steerable Functions Using Cascade-Basis Reduction,” IEEE Trans. Pattern Analysis and Machine Intelligence, vol. 21, no. 6, pp. 552-556, June 1999.
[9] P Campisi and G. Scarano, “A Multiresolution Approach for Texture Synthesis Using the Circular Harmonic Functions,” IEEE Trans. Image Processing, vol. 11, pp. 37-51, 2002.
[10] M.N. Do and M. Vetterli, “Rotation Invariant Texture Characterization and Retrieval Using Steerable Wavelet-Domain Hidden Markov Models,” IEEE Trans. Multimedia, pp. 146-158, 2002.
[11] E.P. Simoncelli and W. T. Freeman, “The Steerable Pyramid: A Flexible Architecture for Multi-Scale Derivative Computation,” Proc. Int’l Conf. Image Processing, pp. 444-447, 1995.
[12] A.F. Frangi, W.J. Niessen, K.L. Vincken, and M.A. Viergever, “Multiscale Vessel Enhancement Filtering,” Medical Image Computing and Computer-Assisted Intervention, vol. 1496, pp. 130-137, 1998.
[13] M. Jacob, T. Blu, and M. Unser, “3D Reconstruction of DNA Filaments from Stereo Cryo-Electron Micrographs,” Proc. IEEE Int’l Symp. Biomedical Imaging: Macro to Nano, vol. 2, pp. 597-600, 2002.
[14] D. Eberly, R. Gardner, B. Morse, S. Pizer, and C Scharlah, “Ridges for Image Analysis,” J. Math. Imaging and Vision, pp. 353-373, 1994.
[15] W.H. Press, S.A. Teukolsky, W.T. Vetterling, and B.P. Flannery, Numerical Recipes in C. Cambridge Univ. Press 1997.
[16] M.A. Ruzon and C. Tomasi, “Color Edge Detection with the Compass Operator,” Proc. IEEE Conf. Computer Vision and Pattern Recognition, vol. 2, pp. 160-166, 1999.
[17] R. Deriche and G. Giraudon, “A Computational Approach for Corner and Vertex Detection,” The Int’l J. Computer Vision, vol. 10, no. 2, pp. 101-124, 1993.
[18] L. Kitchen and A. Rosenfield, “Gray Level Corner Detection,” Pattern Recognition Letters, pp. 95-102, 1982.
[19] Z. Zheng, H. Wang, and E.K. Teoh, “Analysis of Gray Level Corner Detection,” Pattern Recognition Letters, vol. 20, pp. 149-162, 1999.
[20] H. Wang and M. Brady, “Real Time Corner Detection Algorithm for Motion Estimation,” Image and Vision Computing, vol. 13, no. 9, pp. 695-703, 1995.
[21] R. Deriche and O. Faugeras, “2D Curve Matching Using High Curvature Points: Application to Stereo Vision,” Proc. 10th Int’l Conf. Pattern Recognition, 1990 vol. 1, pp. 240-242, 1990.
[22] A.A. Bharath, “Steerable Filters from Erlang Functions,” Proc. British Machine Vision Conf., pp. 144-153, 1998.
[23] D. Demigny, “On Optimal Linear Filtering for Edge Detection,” IEEE Trans. Image Processing, vol. 11, no. 7, pp. 728-737, 2002.
[24] W. Rasband, Image J, http://rsb.info.nih.gov/ij/. 2004.
有关此主题或任何其他计算主题的更多信息,请访问我们的数字图书馆,网址为www.computer.org/publications/dlib。














 690
690











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









