







1.cudata的初始化
跟踪代码我找到了两个地方创建并初始化cudata,一个是FrameData::create里面:
CUDataMemPool m_cuMemPool;
CUData* m_picCTU;
m_picCTU = new CUData[sps.numCUsInFrame];//sps.numCUsInFrame= (1280/64)*(720/64)= 20*11.25 => 20*12,创建240个CTU,刚好覆盖整幅图片
m_cuMemPool.create(0, param.internalCsp, sps.numCUsInFrame);//param.internalCsp = X265_CSP_I420,创建一大块内存空间
for (uint32_t ctuAddr = 0; ctuAddr < sps.numCUsInFrame; ctuAddr++)
m_picCTU[ctuAddr].initialize(m_cuMemPool, 0, param.internalCsp, ctuAddr); struct Mode
{
CUData cu;
...
};
struct ModeDepth
{
Mode pred[MAX_PRED_TYPES];//MAX_PRED_TYPES值为14,表示有14种预测模式
Mode* bestMode;
Yuv fencYuv;
CUDataMemPool cuMemPool;
};
for (uint32_t depth = 0; depth <= g_maxCUDepth; depth++, cuSize >>= 1)//g_maxCUDepth = 4表示四叉树最大深度
{
ModeDepth &md = m_modeDepth[depth];
md.cuMemPool.create(depth, csp, MAX_PRED_TYPES);
for (int j = 0; j < MAX_PRED_TYPES; j++)
{
md.pred[j].cu.initialize(md.cuMemPool, depth, csp, j);
}
}
class CUData
{
public:
//这两个静态变量都只初始化一次,因为它们只跟最大块大小有关,最大块为64时,s_numPartInCUSize恒为16,s_partSet如下:
//s_partSet[0] = bcast256;s_partSet[1] = bcast64;s_partSet[2] = bcast16;s_partSet[3] = bcast4;s_partSet[4] = bcast1;
static cubcast_t s_partSet[NUM_FULL_DEPTH]; // pointer to broadcast set functions per absolute depth
static uint32_t s_numPartInCUSize;
FrameData* m_encData;
const Slice* m_slice;
cucopy_t m_partCopy; // pointer to function that copies m_numPartitions elements
cubcast_t m_partSet; // pointer to function that sets m_numPartitions elements
cucopy_t m_subPartCopy; // pointer to function that copies m_numPartitions/4 elements, may be NULL
cubcast_t m_subPartSet; // pointer to function that sets m_numPartitions/4 elements, may be NULL
uint32_t m_cuAddr; // 该CU所属CTU在图片里的坐标,以64x64块为单位,raster order,对于1280*720的图片,
// 最大块为64时,可以取值0~239 ( (1280/64)*(720/64) = 20*11.25 => 20*12=240 )
uint32_t m_absIdxInCTU; // 该CU在CTU里面的相对位置,以4x4块为单位,由于一个64x64块可以分成256个4x4块,
// 所以它可以取值0~255,这里是Z scan order
uint32_t m_cuPelX; // CU左上角在图片里的坐标X,可以取值0~1280,间隔为4(因为最小CU为4x4)
uint32_t m_cuPelY; // CU左上角在图片里的坐标Y,可以取值0~720,间隔为4
uint32_t m_numPartitions; // 本cu里面4x4块的数量
uint32_t m_chromaFormat; //颜色模式,可以为X265_CSP_I400,X265_CSP_I420,X265_CSP_I422,X265_CSP_I444
uint32_t m_hChromaShift;
uint32_t m_vChromaShift;
/* Per-part data, stored contiguously */
int8_t* m_qp; // array of QP values
uint8_t* m_log2CUSize; // array of cu log2Size TODO: seems redundant to depth
uint8_t* m_lumaIntraDir; // array of intra directions (luma)
uint8_t* m_tqBypass; // array of CU lossless flags
int8_t* m_refIdx[2]; // array of motion reference indices per list
uint8_t* m_cuDepth; // array of depths
uint8_t* m_predMode; // array of prediction modes
uint8_t* m_partSize; // array of partition sizes
uint8_t* m_mergeFlag; // array of merge flags
uint8_t* m_interDir; // array of inter directions
uint8_t* m_mvpIdx[2]; // array of motion vector predictor candidates or merge candidate indices [0]
uint8_t* m_tuDepth; // array of transform indices
uint8_t* m_transformSkip[3]; // array of transform skipping flags per plane
uint8_t* m_cbf[3]; // array of coded block flags (CBF) per plane
uint8_t* m_chromaIntraDir; // array of intra directions (chroma)
enum { BytesPerPartition = 21 }; // combined sizeof() of all per-part data
coeff_t* m_trCoeff[3]; // transformed coefficient buffer per plane
MV* m_mv[2]; // array of motion vectors per list
MV* m_mvd[2]; // array of coded motion vector deltas per list
enum { TMVP_UNIT_MASK = 0xF0 }; // mask for mapping index to into a compressed (reference) MV field
const CUData* m_cuAboveLeft; // pointer to above-left neighbor CTU
const CUData* m_cuAboveRight; // pointer to above-right neighbor CTU
const CUData* m_cuAbove; // pointer to above neighbor CTU
const CUData* m_cuLeft; // pointer to left neighbor CTU
//下面是成员函数,省略
};cudata.cpp里面的初始化代码:
//参数:datapool为一大块内存。
// depth如果为0,则表示64x64的块,为1则是32x32,2则是16x16,3则是8x8
// csp表示颜色模式,可以为X265_CSP_I400,X265_CSP_I420,X265_CSP_I422,X265_CSP_I444,我这里默认用420
// instance为了帮助在datapool里面定位。
void CUData::initialize(const CUDataMemPool& dataPool, uint32_t depth, int csp, int instance)
这里再说明一下cudata里的几个成员函数指针:
m_partSet设置上面数组的值,numPartitions个。如:m_partSet((uint8_t*)m_qp, (uint8_t)qp);就可以将数组m_qp都设为qp了(m_numPartitions个)。
m_partCopy拷贝数组的值,numPartitions个。如:
//这里的ctu是由FrameData::create创建的,跟当前cu创建的地方可能不同,m_encData,m_cuAddr和m_absIdxInCTU是当前cu的成员变量
CUData& ctu = *m_encData->getPicCTU(m_cuAddr);
m_partCopy((uint8_t*)ctu.m_qp + m_absIdxInCTU, (uint8_t*)m_qp);//将该CU的m_qp数组拷贝到FrameData里面对应的CTU的对应CU的数组m_qp里
//对于64x64的块,childGeom.numPartitions为256/4 = 64;对于32x32块,为16;对于16x16的块,为4
uint32_t offset = childGeom.numPartitions * subPartIdx;//subPartIdx < 4
m_subPartCopy((uint8_t*)m_qp + offset, (uint8_t*)subCU.m_qp);//将subCU里的数组拷贝到当前CU的m_qp的对应位置,subCU的大小为当前CU的1/4 /* initialize the remaining CU data in one memset */
//BytesPerPartition为21,由上面的initialize函数就可以看出,m_cuDepth以及它后面的15指针所指的地址是连续的。
//所以这里将从m_cuDepth开始,后面14个指针指向的区域都设为了0。14*256个0。
memset(m_cuDepth, 0, (frame.m_param->internalCsp == X265_CSP_I400 ? BytesPerPartition - 11 : BytesPerPartition - 7) * m_numPartitions);
/* Copy the results of a sub-part (split) CU to the parent CU */
//将subCU的所有数组拷贝到当前CU的数组的对应位置,subCU的大小只有当前cu的1/4
//childGeom只用到了childGeom.numPartitions和childGeom.depth,分别代表subCU的大小和它在树中的深度信息。
//subPartIdx可以取值0~3,表示subCU在父CU中的位置
void CUData::copyPartFrom(const CUData& subCU, const CUGeom& childGeom, uint32_t subPartIdx)
/* If a sub-CU part is not present (off the edge of the picture) its depth and
* log2size should still be configured */
//对于超出图像边界的cu块,其数组m_cuDepth和m_log2CUSize同样需要设置为正确值
void CUData::setEmptyPart(const CUGeom& childGeom, uint32_t subPartIdx)
/* Copy completed predicted CU to CTU in picture */
//将当前CU的所有数组拷贝到FrameData里面对应的CTU的对应CU里
void CUData::copyToPic(uint32_t depth) const
/* The reverse of copyToPic, called only by encodeResidue */
//上面函数的逆过程
//参数:ctu是拷贝源,cuGeom为要拷贝子块的信息(大小,坐标),csp为颜色模式,copyQp表示是否拷贝m_qp数组
void CUData::copyFromPic(const CUData& ctu, const CUGeom& cuGeom, int csp, bool copyQp)
/* Only called by encodeResidue, these fields can be modified during inter/intra coding */
//跟上面的copyToPic类似,只是拷贝的数组没有copyToPic多。注释说是这几个数组在inter/intra编码过程中会被改变
void CUData::updatePic(uint32_t depth, int picCsp) const
/* these functions all take depth as an absolute depth from CTU, it is used to calculate the number of parts to copy */
void setQPSubParts(int8_t qp, uint32_t absPartIdx, uint32_t depth)
{ s_partSet[depth]((uint8_t*)m_qp + absPartIdx, (uint8_t)qp); }
void setTUDepthSubParts(uint8_t tuDepth, uint32_t absPartIdx, uint32_t depth)
{ s_partSet[depth](m_tuDepth + absPartIdx, tuDepth); }
void setLumaIntraDirSubParts(uint8_t dir, uint32_t absPartIdx, uint32_t depth)
{ s_partSet[depth](m_lumaIntraDir + absPartIdx, dir); }
void setChromIntraDirSubParts(uint8_t dir, uint32_t absPartIdx, uint32_t depth)
{ s_partSet[depth](m_chromaIntraDir + absPartIdx, dir); }
void setCbfSubParts(uint8_t cbf, TextType ttype, uint32_t absPartIdx, uint32_t depth)
{ s_partSet[depth](m_cbf[ttype] + absPartIdx, cbf); }
void setCbfPartRange(uint8_t cbf, TextType ttype, uint32_t absPartIdx, uint32_t coveredPartIdxes)
{ memset(m_cbf[ttype] + absPartIdx, cbf, coveredPartIdxes); }
void setTransformSkipSubParts(uint8_t tskip, TextType ttype, uint32_t absPartIdx, uint32_t depth)
{ s_partSet[depth](m_transformSkip[ttype] + absPartIdx, tskip); }
void setTransformSkipPartRange(uint8_t tskip, TextType ttype, uint32_t absPartIdx, uint32_t coveredPartIdxes)
{ memset(m_transformSkip[ttype] + absPartIdx, tskip, coveredPartIdxes); }
3.获取相邻块函数
//函数功能:返回CUData对象的一个子块的左边的块。
//参数 :curPartUnitIdx为CUData对象的一个子块的坐标。该坐标是该子块相对于该cu所属的CTU的。
// 以4x4块为单位。对于一个64x64的CTU来说,可以有16x16=256个4x4块。坐标编号为0~255.
// lPartUnitIdx和函数返回值都作为返回值:(这里为了直观说明,混淆了Z order和Raster坐标变换)(下面的16是指当CTU为64x64时,每行有16个4x4块)
// 当curPartUnitIdx对应的块在父CU的父CTU的最左边时,函数返回值为当前CTU左边的一个CTU,lPartUnitIdx为curPartUnitIdx + 16 - 1
// 否则
// 当curPartUnitIdx对应的块在父CU最左边时,函数返回值为当前的CU的父CTU,lPartUnitIdx为curPartUnitIdx - 1
// 当curPartUnitIdx对应的块不在父CU最左边时,函数返回值为当前的CU,lPartUnitIdx为curPartUnitIdx - 1 - 父CU的地址
const CUData* CUData::getPULeft(uint32_t& lPartUnitIdx, uint32_t curPartUnitIdx) const
//下面这几个函数跟getPULeft差不多
//函数功能:返回CUData对象的一个子块的正上方的块。
const CUData* CUData::getPUAbove(uint32_t& aPartUnitIdx, uint32_t curPartUnitIdx) const
//函数功能:返回CUData对象的一个子块的左上角的块。
const CUData* CUData::getPUAboveLeft(uint32_t& alPartUnitIdx, uint32_t curPartUnitIdx) const
//函数功能:返回CUData对象的一个子块的右上角的块。
const CUData* CUData::getPUAboveRight(uint32_t& arPartUnitIdx, uint32_t curPartUnitIdx) const
//函数功能:返回CUData对象的一个子块的左下角的块。
const CUData* CUData::getPUBelowLeft(uint32_t& blPartUnitIdx, uint32_t curPartUnitIdx) const//在getPUBelowLeft函数基础上多了个参数partUnitOffset,表示需要获取的块在更下面,
//所获取的块与左下角的块相比,在其下方partUnitOffset*4个像素处,也就是中间隔了partUnitOffset个4x4块
const CUData* CUData::getPUBelowLeftAdi(uint32_t& blPartUnitIdx, uint32_t curPartUnitIdx, uint32_t partUnitOffset) const
//跟上面类似,所获取的块与右上角相比,在其右方(partUnitOffset - 1)*4个像素处,也就是中间隔了partUnitOffset - 1个4x4块
const CUData* CUData::getPUAboveRightAdi(uint32_t& arPartUnitIdx, uint32_t curPartUnitIdx, uint32_t partUnitOffset) const
//获取该CU的子块partIdx的左上角和右上角的4x4块的坐标,partIdx只能取值0,1,2,3
void CUData::deriveLeftRightTopIdx(uint32_t partIdx, uint32_t& partIdxLT, uint32_t& partIdxRT) const
//获取该CU的子块puIdx的左下角的4x4块的坐标
uint32_t CUData::deriveLeftBottomIdx(uint32_t puIdx) const
//获取该CU的子块puIdx的右下角的4x4块的坐标
uint32_t CUData::deriveRightBottomIdx(uint32_t puIdx) const
4.获取qp函数
将一个CTU分成四等分,从上到下,从左到右编号为区间0,区间1,区间2,区间3
/* Get left QpMinCu */
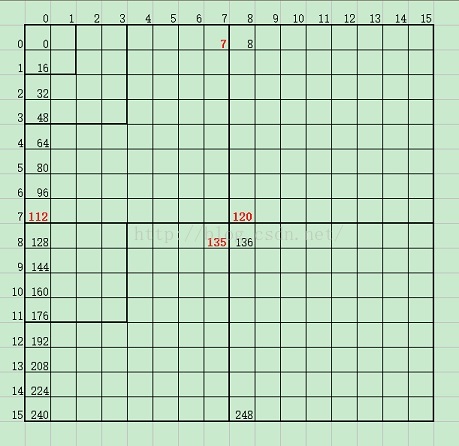
//函数功能:如果该cu的子块curAbsIdxInCTU在该CU的父CTU的左半边,即区间0和2,则返回NULL,lPartUnitIdx无意义
// 如果该cu的子块curAbsIdxInCTU在该CU的父CTU的右半边,即区间1和3,这返回FrameData里对应的CTU,lPartUnitIdx分别为
// 21(区间1)和139(区间3),21转换为raster坐标即为7,149转换后为135,见下图。
const CUData* CUData::getQpMinCuLeft(uint32_t& lPartUnitIdx, uint32_t curAbsIdxInCTU) const
/* Get above QpMinCu */
//函数功能:如果该cu的子块curAbsIdxInCTU在该CU的父CTU的上半边,即区间0和1,则返回NULL,lPartUnitIdx无意义
// 如果该cu的子块curAbsIdxInCTU在该CU的父CTU的下半边,即区间2和3,则返回FrameData里对应的CTU,lPartUnitIdx分别为
// 42(区间2)和106(区间3),42转换为raster坐标即为112,106转换后为120,见下图。
const CUData* CUData::getQpMinCuAbove(uint32_t& aPartUnitIdx, uint32_t curAbsIdxInCTU) const
//本函数只被下面的函数getLastCodedQP调用。
//函数功能:如果该cu的子块absPartIdx的前面一块(按z scan order)已经预测了,则返回前面一块的坐标。
// 如果没有预测,则前面一块继续找前面一块,直到找到已经预测了的块,或者超出该cu范围时停止
int CUData::getLastValidPartIdx(int absPartIdx) const
//函数功能:1).先在本cu里面寻找,该子块absPartIdx前面是否有块已经预测了。
// 如果有,则返回前面已经预测的qp。
// 2).否则,在该ctu里面寻找已经预测了的块。找到则返回qp。
// 3).如果还没找到,判断该ctu是否在图片的最左边,如果不在就在左边的CTU里面寻找,
// 看对应位置是否已经预测,没找到继续向左找。
// 4).如果找到了图片边界,就返回slice里的qp
int8_t CUData::getLastCodedQP(uint32_t absPartIdx) const
/* Get reference QP from left QpMinCu or latest coded QP */
//上面四个函数只被这个函数调用,用于获取qp
int8_t CUData::getRefQP(uint32_t curAbsIdxInCTU) const
{
uint32_t lPartIdx = 0, aPartIdx = 0;
const CUData* cULeft = getQpMinCuLeft(lPartIdx, m_absIdxInCTU + curAbsIdxInCTU);
const CUData* cUAbove = getQpMinCuAbove(aPartIdx, m_absIdxInCTU + curAbsIdxInCTU);
return ((cULeft ? cULeft->m_qp[lPartIdx] : getLastCodedQP(curAbsIdxInCTU)) + (cUAbove ? cUAbove->m_qp[aPartIdx] : getLastCodedQP(curAbsIdxInCTU)) + 1) >> 1;
}
5.运动估计相关
//有点像书上的5.2.2.2 Merge Candidate List Construction
//返回值:候选列表的长度。
//参数:puIdx可以取值0,1,2,3,表示子块的位置。
// absPartIdx应该也是子块的坐标,但是函数里没怎么用。
// candMvField和candDir为返回值,实际上只是找到了合适的预测块后,拷贝对应值:
// candMvField[i].mv = cu->m_mv[picList][absPartIdx];
// candMvField[i].refIdx = cu->m_refIdx[picList][absPartIdx];
// candDir[i] = cu->m_interDir[absPartIdx];
//代码里面有点奇怪的是isDiffMER函数的调用,我加printf测试了一下,所有的isDiffMER函数都返回true。搞不懂是为什么。
//里面的临时变量nPSW和nPSH是子快的宽度和高度,单位是像素。xP和yP是子块的左上角坐标,单位也是像素。
uint32_t CUData::getInterMergeCandidates(uint32_t absPartIdx, uint32_t puIdx, MVField(*candMvField)[2], uint8_t* candDir) const
/* Constructs a list of candidates for AMVP, and a larger list of motion candidates */
//填充neighbours[]结构数组,结构数组有下面6个:
//motion vector predictor direction used in AMVP
//enum MVP_DIR
//{
// MD_LEFT = 0, // MVP of left block
// MD_ABOVE, // MVP of above block
// MD_ABOVE_RIGHT, // MVP of above right block
// MD_BELOW_LEFT, // MVP of below left block
// MD_ABOVE_LEFT, // MVP of above left block
// MD_COLLOCATED // MVP of temporal neighbour
//};
//调用下面的getInterNeighbourMV函数填充前五个,第六个调用下面的getCollocatedMV函数填充。
void CUData::getNeighbourMV(uint32_t puIdx, uint32_t absPartIdx, InterNeighbourMV* neighbours) const
//函数功能:先获取该CU的partUnitIdx子块的dir方向的块,dir可以为上面的MD_BELOW_LEFT等6个值。
// 然后将该块的m_mv和m_refIdx填入neighbour结构体里面。
void CUData::getInterNeighbourMV(InterNeighbourMV *neighbour, uint32_t partUnitIdx, MVP_DIR dir) const
//同位pu:即当前pu在邻近已编码图像中对应位置pu
//函数功能:获得同位pu的m_mv。然后和当前pu的m_mv相比较,取两个m_mv的中间值。
bool CUData::getColMVP(MV& outMV, int& outRefIdx, int picList, int cuAddr, int partUnitIdx) const
//函数功能:将同位pu的m_mv和m_refIdx拷贝到neighbour结构体里面。
// Cache the collocated MV.
bool CUData::getCollocatedMV(int cuAddr, int partUnitIdx, InterNeighbourMV *neighbour) const
6.Geoms初始化函数
单看函数可能有点抽象,在Frameencoder.cpp里面会初始化并使用Geoms,一般是这样使用的:m_cuGeoms[m_ctuGeomMap[cuAddr]]。
a).m_cuGeoms的初始化:如果视频的宽度和高度都不是64的整数倍,则会计算出4个m_cuGeoms,分别是:
完整64*64CTU(CTU在图像内),缺右边(超出了图像右边界),缺下边(超出了图像下边界),同时缺右边和下边(图像右下角CTU)
比如说我现在用的是1280*720的视频,其中1280是64的倍数,720不是。所以初始化会产生两个m_cuGeoms:
m_cuGeoms[0]为完整的64*64CTU,m_cuGeoms[85]为缺下边(超出了图像下边界)(这里85是因为一个CTU有85种划分方式)。
它们的初始化是分别调用:void CUData::calcCTUGeoms(64,64,64,8,m_cuGeoms);和
void CUData::calcCTUGeoms(64,16,64,8,m_cuGeoms + 85);
b).cuAddr取值分别为0,1,2,...,19 ,[20,21,...,39],中括号表示可以并行.(1280/64 = 20列)
c).如果视频尺寸为1280*720,则m_ctuGeomMap[0 ~ 220]为0,m_ctuGeomMap[220 ~ 240]为85.因为视频
有720/64 = 11.25 = 12行,前11行都是完整CTU,所以m_ctuGeomMap[0 ~ 220]都为0.
chushihuconst uint32_t g_depthScanIdx[8][8] = {
{ 0, 1, 4, 5, 16, 17, 20, 21, },
{ 2, 3, 6, 7, 18, 19, 22, 23, },
{ 8, 9, 12, 13, 24, 25, 28, 29, },
{ 10, 11, 14, 15, 26, 27, 30, 31, },
{ 32, 33, 36, 37, 48, 49, 52, 53, },
{ 34, 35, 38, 39, 50, 51, 54, 55, },
{ 40, 41, 44, 45, 56, 57, 60, 61, },
{ 42, 43, 46, 47, 58, 59, 62, 63, }
};
#define CU_SET_FLAG(bitfield, flag, value) (bitfield) = ((bitfield) & (~(flag))) | ((~((value) - 1)) & (flag))
void CUData::calcCTUGeoms(uint32_t ctuWidth, uint32_t ctuHeight, uint32_t maxCUSize, uint32_t minCUSize, CUGeom cuDataArray[CUGeom::MAX_GEOMS])
{
// Initialize the coding blocks inside the CTB
for (uint32_t log2CUSize = g_log2Size[maxCUSize], rangeCUIdx = 0; log2CUSize >= g_log2Size[minCUSize]; log2CUSize--)
{
uint32_t blockSize = 1 << log2CUSize;
uint32_t sbWidth = 1 << (g_log2Size[maxCUSize] - log2CUSize);
int32_t lastLevelFlag = log2CUSize == g_log2Size[minCUSize];
for (uint32_t sbY = 0; sbY < sbWidth; sbY++)
{
for (uint32_t sbX = 0; sbX < sbWidth; sbX++)
{
uint32_t depthIdx = g_depthScanIdx[sbY][sbX];
uint32_t cuIdx = rangeCUIdx + depthIdx;
uint32_t childIdx = rangeCUIdx + sbWidth * sbWidth + (depthIdx << 2);
uint32_t px = sbX * blockSize;
uint32_t py = sbY * blockSize;
//这两个Flag用于判断一个块是全部在图像外面还是部分在图像外面。
//如果部分在图像外面,并且非叶子节点,则presentFlag = true,splitMandatoryFlag = true
//如果全部在图像外面则,都为false
int32_t presentFlag = px < ctuWidth && py < ctuHeight;
int32_t splitMandatoryFlag = presentFlag && !lastLevelFlag && (px + blockSize > ctuWidth || py + blockSize > ctuHeight);
/* Offset of the luma CU in the X, Y direction in terms of pixels from the CTU origin */
uint32_t xOffset = (sbX * blockSize) >> 3;
uint32_t yOffset = (sbY * blockSize) >> 3;
X265_CHECK(cuIdx < CUGeom::MAX_GEOMS, "CU geom index bug\n");
CUGeom *cu = cuDataArray + cuIdx;
cu->log2CUSize = log2CUSize;//该cu的大小
cu->childOffset = childIdx - cuIdx;//该cu的第一个子cu的索引与该cu自己的索引之差
cu->absPartIdx = g_depthScanIdx[yOffset][xOffset] * 4;//该cu在CTU里面的位置,以4x4块为单位
//该cu可以分成多少个4x4的块。
cu->numPartitions = (NUM_4x4_PARTITIONS >> ((g_maxLog2CUSize - cu->log2CUSize) * 2));
cu->depth = g_log2Size[maxCUSize] - log2CUSize;//该cu块所在的深度
cu->geomRecurId = cuIdx;//该cu的索引
cu->flags = 0;
CU_SET_FLAG(cu->flags, CUGeom::PRESENT, presentFlag);
CU_SET_FLAG(cu->flags, CUGeom::SPLIT_MANDATORY | CUGeom::SPLIT, splitMandatoryFlag);
CU_SET_FLAG(cu->flags, CUGeom::LEAF, lastLevelFlag);
//当该cu部分在图像外面,且非叶子节点时,会设置CUGeom::PRESENT,CUGeom::SPLIT_MANDATORY | CUGeom::SPLIT
//当该cu完全在图像里面时,会设置CUGeom::PRESENT
//当该cu完全在图像外面时,会设置为0.
}
}
rangeCUIdx += sbWidth * sbWidth;
}
}















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









