







引言:随着人类社会的发展进步,火灾成为了不可忽视的多发性问题。火灾一次次展示了其对于人员伤亡和财产的巨大破坏性。火灾的预防和检测一直是人类与火灾斗争过程中关注的焦点[1]。近些年来,随着数字通信技术、计算机技术的发展, 数字图像处理技术获得了广泛的应用。因此,人们提出了利用图像处理技术进行火灾的监控与报警[2]。
基于图像处理的视频火焰检测(Video Fire Detection, VFD)系统较之传统的火灾监控设备具有识别速度快,适应能力强,误报率低,使用方便等优点。但同时如何更加精确的将火焰从复杂的背景及各种干扰光源等中识别出来就显得越发的迫切。一个完整的火焰识别系统主要包括以下六个环节:图像获取、图像预处理、火焰图像分割、火焰图像特征提取、火焰跟踪、火焰识别[3]。完善这其中的一个或者多个环节正是大量算法研究人员的目标,以便借此提高VFD系统的整体识别性能,可以更好的应用到实际生活当中。
1.图像获取及预处理
1.1图像灰度化处理
通过红外相机或者普通的相机可以获取到相关的火焰图像或者视频信息。基于这些图像和视频就可以把它们转化为灰度图像。而所谓的灰度图像(Gray-Scale Image),是一种像素亮度从黑到白连续变化的单色图像,其像素只含有亮度信息,不含色调和饱和度等色彩信息[4]。图像的灰度化处理就是将彩色图像转化为灰度图像的过程。图像灰度化处理不仅可以降低数据信息的处理量和存储量,而且减少了时间成本,增加了识别精确度。
在进行火焰图像的灰度化处理时可以
通过式(1-1)的线性函数进行变换,得到特征更加明显的灰度图像。除了线性变换以外,还有对数变换(式1-2),伽玛变换(式1-3),阈值变换(式1-4)等方法。图一分别显示了在不同取值下灰度图像的线性变换及其对应的直方图。
 (1-1)
(1-1)
 (1-2)
(1-2)
 (1-3)
(1-3)
 (1-4)
(1-4)

原图像 原图像直方图
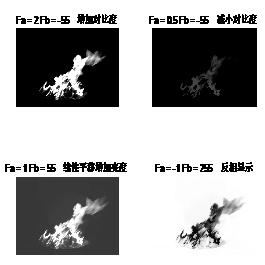

图一 原图像及线性变换后的灰度图和直方图
Figure1 Original image and it’s grayscale and histogram image after linearly transformed
1.2图像平滑滤波
图像在形成、传输、接收和处理的过程中, 由于通过的传输介质的实际性能和接收设备性能的限制, 不可避免地存在着外部干扰和内部干扰, 因此会产生各种各样的噪声[5]。而火焰在形成的过程当中也会受到天气,光照等噪声影响,因此在进行火焰识别前应当对火焰图像进行平滑滤波处理。图像的平滑滤波方法大致有均值滤波,高斯滤波以及中值滤波。
均值滤波运算简单,对高斯噪声具有良好的去噪能力,但是在抑制噪声的过程中会损失图像的边缘等细节信息从而导致整幅图像模糊的问题[6]。高斯滤波由于对任一像素都采用固定窗口的平滑操作,而没有考虑像素本身的特点及局部纹理区域的相关性,故造成图像边缘被模糊[6]。中值滤波可以有效消除图像中的随机噪声,而且不会使图像边缘变得模糊,能够有效保护原始信号,但是中值滤波需要使用排序找出中值,其计算时间复杂度高,因而不能满足海量、高分辨率图像实时滤波处理的需求[7]。故此,在火焰图像滤波的过程当中,应该根据具体的噪声原因选择效果较好的滤波器做到具体问题具体分析。图2展示了不同的滤波器对于不同噪声的处理效果。
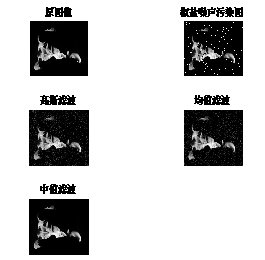
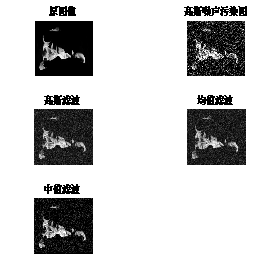
图二 不同滤波器对不同噪声的处理效果
Figure2 Different filters for different noise
2.图像分割
在火焰检测时,图像分割是其关键步骤。将火焰图像完整且准确的从复杂的背景中分割出来为后续的任务提供了保障。其分割的结果往往也决定了整个检测的结果。
2.1阈值分割
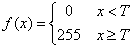
阈值分割是图像分割中一类最早被研究和使用的方法,其具有物理意义明确、效果明显、易于实现、实时性良好的特点[8]。阈值分割的基本思想就是根据某一阈值T(式2-1)将图像分为两部分:前景和背景。但是当图像的前景和背景区域的灰度值分布并不均匀时就需要用到多个阈值来提取目标。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 278
278

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









