







[OpenCV+VS2015]火焰检测算法(HSI判据)
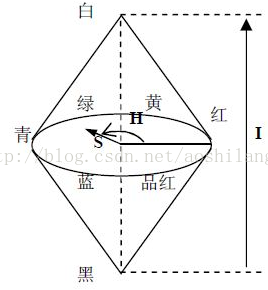
1 HSI模型和简介
别人的宝藏文章 :https://blog.csdn.net/qq_27569955/article/details/51531460
模型,还有RGB转HSI的关系这里面的介绍都很棒,我从中受益匪浅
2 代码
#include <opencv2\opencv.hpp>
#include <iostream>
#include <math.h>
using namespace cv;
using namespace std;
double Judge(double in);
void RGBtoHIS(Mat& image_input, Mat& image_output);
void DrawFire(Mat &inputImg, Mat foreImg);
void FireDetection(Mat &image_input, Mat &image_output);
int main(int argc, char** argv) {
Mat src = imread("E:\\vs_work\\firedetection\\8.jpg");
Mat dst;
FireDetection(src, dst);
imshow("original picture", src);
imshow("convert picture", dst);
//imwrite("E:\\vs_work\\result\\10_binary_image.jpg", dst);
//imwrite("E:\\vs_work\\result\\10_Detect_Fire.jpg", src);
waitKey(0);
return 0;
}
void FireDetection(Mat &image_input, Mat &image_output)
{
image_output = Mat::zeros(image_input.size(), CV_8UC1); //初始化output矩阵
Mat image_middle;
if (image_input.empty()) {
printf("could not load image...please try again!/n ");
}
if (image_output.empty() || image_output.channels() != 1) {
printf("could not initialize output...please try again!/n ");
}
/*初始化程序报错*/
RGBtoHIS( image_input, image_middle);
for (int i = 0; i < image_middle.rows; i++) {
for (int j = 0; j < image_middle.cols; j++) {
double H, S, I;
H = image_middle.at<uchar>(i, image_middle.channels()*j + 0);
S = image_middle.at<uchar>(i, image_middle.channels()*j + 1);
I = image_middle.at<uchar>(i, image_middle.channels()*j + 2);
if ((H>0 && H<60) && S>20 && S<255 && I>30 && I<255)
{
image_output.at<uchar>(i, j) = 255;
//printf("H = %f", H);
}
else
{
image_output.at<uchar>(i, j) = 0;
}
}
}
namedWindow("original image", WINDOW_AUTOSIZE);
imshow("original image", image_input);
namedWindow("binary image", WINDOW_AUTOSIZE);
imshow("binary image", image_output);
imshow("HIS image", image_middle);
DrawFire(image_input, image_output);
}
void DrawFire(Mat &inputImg, Mat foreImg)
{
vector<vector<Point>> contours_set;//保存轮廓提取后的点集及拓扑关系
findContours(foreImg, contours_set, RETR_EXTERNAL, CHAIN_APPROX_NONE);
Mat result0;
Scalar holeColor;
Scalar externalColor;
vector<vector<Point>>::iterator iter = contours_set.begin();
for (; iter != contours_set.end(); ) //迭代器循环
{
Rect rect = boundingRect(*iter);
/* float radius;
Point2f center;
minEnclosingCircle(*iter, center, radius);*/
if (rect.area()> 0)
{
rectangle(inputImg, rect, Scalar(0, 255, 0)); //scalar表示是什么颜色去框选
++iter;
}
else
{
iter = contours_set.erase(iter);
}
}
imshow("Detect Fire", inputImg);
}
void RGBtoHIS(Mat& image_input, Mat& image_output)
{
image_output = Mat::zeros(image_input.size(), CV_8UC3); //初始化output矩阵
if (image_input.empty()) {
printf("could not load RGBtoHIS image...please try again!/n ");
}
if (image_output.empty() || image_output.channels() != 3) {
printf("could not initialize RGBtoHIS output...please try again!/n ");
}
/*初始化程序报错*/
for (int i = 0; i < image_input.rows; i++) {
for (int j = 0; j < image_input.cols; j++) {
float R, G, B;
B = image_input.at<uchar>(i, image_input.channels()*j + 0);
G = image_input.at<uchar>(i, image_input.channels()*j + 1);
R = image_input.at<uchar>(i, image_input.channels()*j + 2);
//RGB转HIS公式编写
/* B = B / 255.0;
G = G / 255.0;
R = R / 255.0;*/
float minRGB = min(min(R, G), B);
double I = (R + B + G) / 3;
double S = 1 - 3 * minRGB / (R + B + G);
double H;
double theta, den, num, esp = 0.0000001;
double pi = 3.14159265;
num = 0.5*((R - G) + (R - B));
den = (R - G)*(R - G) + (R - B)*(G - B);
den = sqrt(den);
den = num / (den); //den = num / (den+esp);
theta = acos(den);
if (G >= B)
{
H = theta;
}
else
{
H = 2 * pi - theta;
}
//H的单位是弧度
//H = Judge(H * 255);
//I = Judge(I * 255);
//S = Judge(S * 255);
H = H / (2 * pi);
image_output.at<uchar>(i, image_output.channels()*j + 0) = H*360 ;
image_output.at<uchar>(i, image_output.channels()*j + 1) = S*255 ;
image_output.at<uchar>(i, image_output.channels()*j + 2) = I*255 ;
}
}
}
double Judge(double in)
{
double out;
if (in < 0)
{
out = 0;
}
if (in > 255)
{
out = 255;
}
else
{
out = in;
}
return out;
}
3 注意点
1、HSI模型下中的H要注意一开始计算出来是弧度,要把它转化为角度,然后判断0~60°内是红到黄色的变换
2、我这里使用的HSI参数是可以随着不同的变化调整的
0<H<60
20<S<255
30<I<255
4 效果





很简单的算法,后面还要学一些更好的检测方法















 4万+
4万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









